



















Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
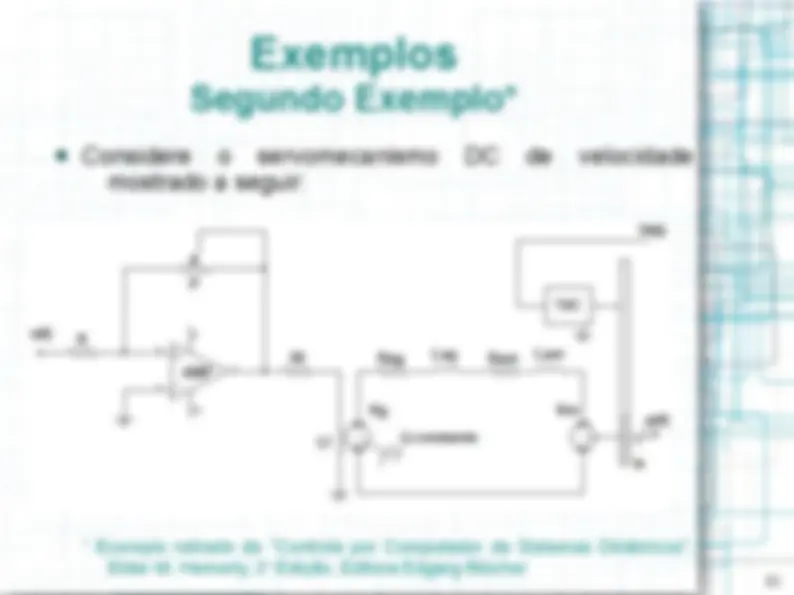
Apresentacao sobre Filtros de Kalman
Tipologia: Notas de estudo
1 / 90

Esta página não é visível na pré-visualização
Não perca as partes importantes!
Daniel Lúcio de Souza Borba Escola de Engenharia – Universidade Federal de Minas Gerais Programa de Pós-graduação em Engenharia Elétrica 14/05/
Sumário
Introdução O que é o filtro de Kalman?
Introdução Por que o filtro de Kalman é ótimo?
Introdução Por que o filtro é necessário?
Introdução Aplicações
Conceitos Básicos Variáveis Aleatórias
F (^) X x = p [−∞ , x ] F X x 0 quanto x −∞ F (^) X x 1 quanto x ∞ F (^) X x é uma função não decrescente de x f (^) X x = d dx F (^) X x f X x é uma função não negativa ∫−∞ ∞ f (^) X x dx = 1 p (^) X [ a , b ]=∫ a b f (^) X x dx
Conceitos Básicos Média e Esperança
Valor esperado de X = E X =∑ i = 1 n p i x i = X ≈ p 1 N x 1 p 2 N x 2 ⋯ pN N xN N Esperança de X = E X =∫ −∞ ∞ x f (^) X x dx
Conceitos Básicos Variância e Desvio Padrão
g X = X − E X X = X 2
X 2 = E g X 2 Segundo momento estatístico de g X X 2 = E [ X − E X 2 ] X 2 = E X 2 − E X 2
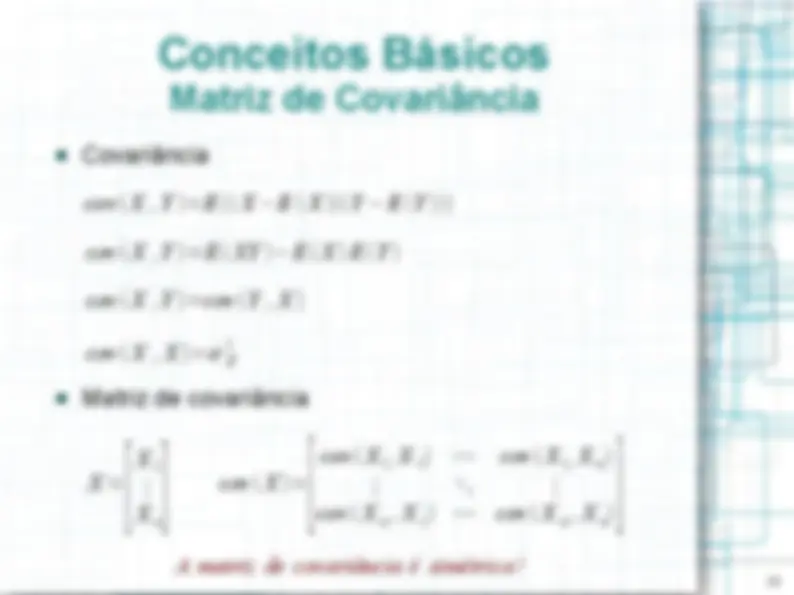
Matriz de Covariância
cov X ,Y = E X − E X Y − E Y
n
1
n
n
X 2
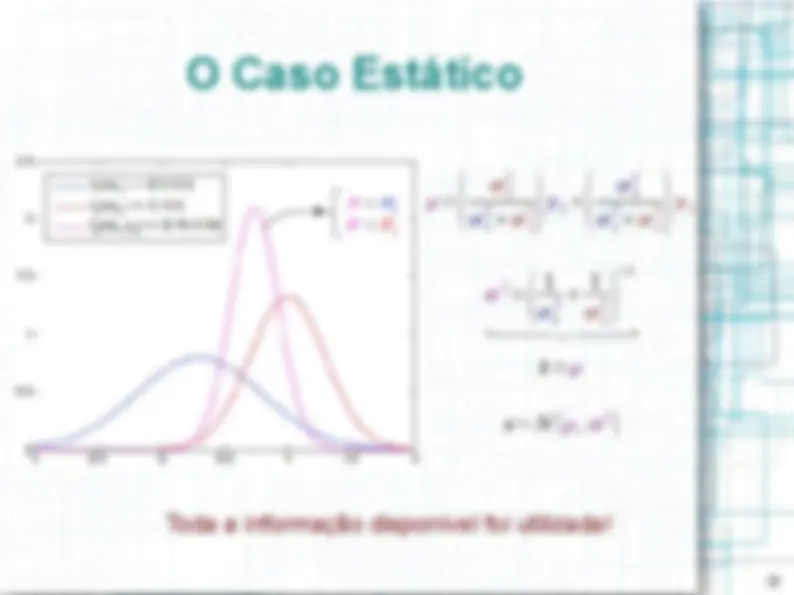
Conceitos Básicos Distribuição Normal ou Gaussiana
Conceitos Básicos Independência Estatística e Probrabilidade Condicional
f (^) X ∣ Y x , y = f (^) Y ∣ X y f (^) X X f Y y
Conceitos Básicos Ruído Branco RX = { se = 0 então A senão 0 Delta de Kronecker
Conceitos Básicos Ruído Branco