PMR-2360 - Controle e Automação I
2a. Lista de Exercícios - Versão 2004
[Ex. 1] Um sistema de controle para um sistema de testes de suspensão de carros possui um con-
trolador unitário (i.e. H(s) = 1) e uma planta dada por:
G(s) = K(s2+ 4s+ 8)
s2(s+ 4) .(1)
Deseja-se escolher Ktal que os pólos dominantes tenham um valor de coeficiente de
amortecimento ζ= 0.5. Utilizando o lugar das raízes mostre que para este requisito
K= 7.35 es=−1.3 + j2.2
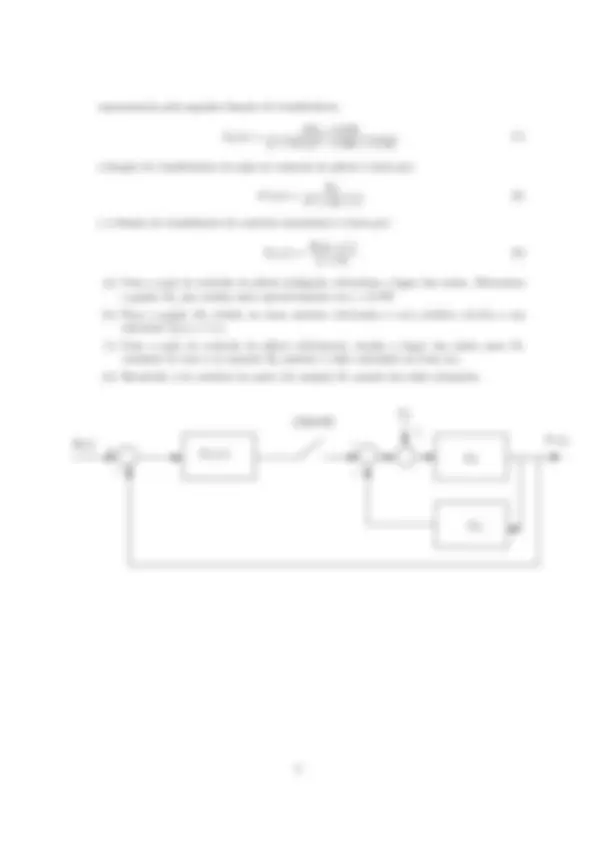
[Ex. 2] Considere um sistema em malha fechada como o da figura acima, onde
H(s) = s+a
s,(2)
e
G(s) = 2
(s+ 1)(s+ 3).(3)
Utilizando o lugar das raízes, determine o valor de ade tal forma que o coeficiente de
amortecimento ζdos pólos dominantes em malha fechada seja igual a 0.5.
[Ex. 3] Um sistema de controle para um laser cirúrgico acoplado a um manipulador com motor
CC pode ser utilizado em operações ortopédicas de quadris. Tais cirurgias requerem alta
precisão de posição e velocidade. O sistema de controle em malha fechada é dado por:
H(s) = K, (4)
e
G(s) = 1
s(τ1s+ 1)(τ2s+ 1).(5)
Onde τ1= 0.1sé a constante elétrica do motor CC e τ2= 0.2sé a constante mecânica do
motor CC. O ganho Kdo controlador deve ser ajustado de tal forma que o erro estático para
uma entrada do tipo rampa r(t) = At (onde A= 1mm/s) é menor que 0.1mm enquanto a
estabilidade é mantida. Deseja-se que o erro durante a operação nunca ultrapasse o valor
de 0.1mm. Calcule o ganho Ke proponha uma metodologia de operação que garanta os
requisitos acima. Obs: Para o cálculo do sobresinal utilize a hipótese de uma entrada a
degrau e admita que os pólos complexos sejam dominantes.
[Ex. 4] Os motores elétricos de corrente contínua (CC) são largamente utilizados em diversas
máquinas de sistemas de manufatura. Um motor elétrico controlado por armadura as-
sociado a eventuais engrenagens, sensores para realimentação e uma inércia global fixa, é
um sistema de 3a. ordem considerando a posição angular θcomo a saída do sistema. Na
prática, o sistema é modelado como um sistema de 2a. ordem já que a constante de tempo
elétrica do sistema é bem menor que a constante de tempo mecânica.
Vamos supor que um motor CC é utilizado numa máquina para efetuar o posicionamento
angular de um certo componente.
Projete um sistema de controle para esta máquina segundo as seguintes hipóteses:
1