Baixe Motor de Passo e outras Notas de estudo em PDF para Engenharia Mecânica, somente na Docsity!
Universidade Federal de Minas Gerais – Escola de Engenharia
Departamento de Engenharia Mecânica
Tecnologia da Automação
Trabalho
Motor de Passo
PERÍODO: 2
°
semestre de 2006
Autor:
Paulo José Alves de Souza - (2001017116)
Disciplina: Tecnologia da Automação Professor responsável: J. M. Gálvez
Índice
- HISTÓRICO
- PARÂMETROS E CONCEITOS PERTINENTES AOS MOTORES DE PASSO....................................................
- INTRODUÇÃO
- CONSTRUÇÃO BÁSICA E PRINCÍPIO DE FUNCIONAMENTO DE UM MOTOR DE PASSO........................................................
- ALGUMAS APLICAÇÕES DOS MOTORES DE PASSOS........................................................................................
- PERIFÉRICOS DE COMPUTADOR........................................................................................................................................
- PLOTTERS GRÁFICOS.................................................................................................................................................
- TIPOS DE MOTORES DE PASSO
- MOTORES DE RELUTÂNCIA VARIÁVEL (VR – VARIABLE RELUCTANCE)
- MOTORES DE ÍMÃ PERMANENTE (PM – PERMANENT MAGNET)
- MOTORES HÍBRIDOS (HB - HYBRID)...............................................................................................................................
- MOTOR UNIPOLAR
- MOTOR BIPOLAR
- MODOS DE ACIONAMENTO DOS MOTORES DE PASSO..................................................................................
- PASSO COMPLETO (“FULL STEP”)
- Modo Passo Completo Wave (Menor torque, menor consumo que o modo normal)
- Modo Passo Completo Normal (Maior torque, maior consumo que o modo wave).................................................
- MEIO-PASSO (“HALF-STEP”).........................................................................................................................................
- Detalhe Quanto ao Torque Produzido no Modo Meio-Passo...................................................................................
- MICRO-PASSO (MICROSTEPPING)
- ANÁLISE DETALHADA DO FUNCIONAMENTO DE UM MOTOR DE PASSO...............................................
- ANÁLISE DO FUNCIONAMENTO DE UM MOTOR DE PASSO DO TIPO HÍBRIDO
- O MOTOR HÍBRIDO PADRÃO DE 200 PASSOS
- BOBINAS BIFILARES..................................................................................................................................................
- CARACTERÍSTICAS DE DESEMPENHO DO MOTOR DE PASSO (TORQUE, VELOCIDADE...)................
- QUANTO AO TORQUE ESTÁTICO DE RETENÇÃO, OU SIMPLESMENTE, TORQUE DE RETENÇÃO (HOLDING TORQUE)
- QUANTO À NATUREZA DA RESPOSTA OSCILATÓRIA DO MOTOR DE PASSO
- CIRCUITOS BÁSICOS DE ACIONAMENTO DE MOTOR DE PASSO
- CIRCUITOS ACIONADORES (DRIVERS)
- Acionador Unipolar..................................................................................................................................................
- Acionador Bipolar
- ESTRATÉGIAS DE ACIONAMENTO
- R/L Driver.................................................................................................................................................................
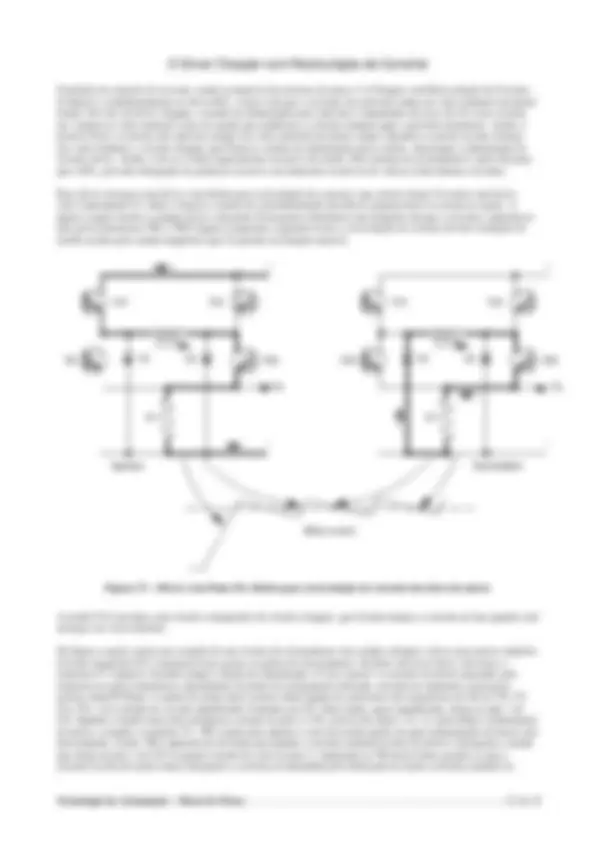
- O Driver Chopper com Recirculação de Corrente
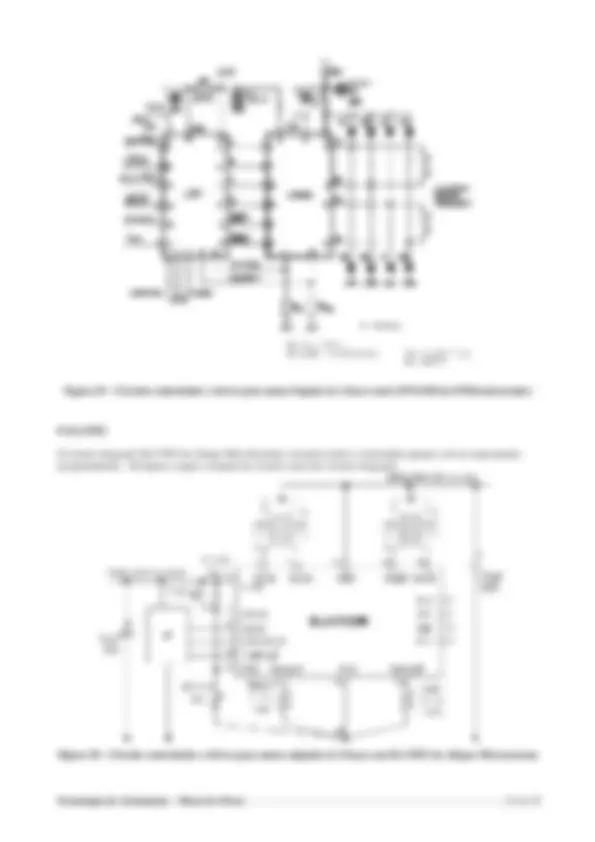
- Circuitos drivers e controladores comerciais...........................................................................................................
- REFERÊNCIA BIBLIOGRÁFICA
A tabela descrita a seguir, ilustra os valores de ângulos de passo dos motores comumente encontrados no mercado, com seus respectivos números de passos por volta.
Tabela 1- Ângulos de passo dos motores mais e os respectivos passos totais por volta
Angulo por passo [graus] Passos por volta 0,72 500 1,8 200 2,0 180 2,5 144 5,0 72 7,5 48 15,0 24
Construção Básica e Princípio de Funcionamento de um Motor de Passo
As partes principais que compõem um motor de passo são:
- Estator
- Pólos
- Enrolamento (Fases)
- Rotor
O estator, é a parte fixa do motor. Nele estão os pólos onde se encontram instaladas as bobinas que compõem o enrolamento. O rotor é a parte móvel. Nele se encontra instalado um eixo através do qual é transmitida potência mecânica para a carga.
Cada bobina quando percorrida por uma corrente elétrica, produz um campo eletromagnético que por sua vez irá magnetizar o pólo no qual esta se encontra instalada. Os pólos, portanto, devem ser constituídos de material de baixa relutância 2 magnética.
A conversão de energia eletromagnética em mecânica ocorre da seguinte forma nos motores de passo:
O motor apresentado na figura a seguir, cujo rotor é constituído por um ímã permanente – motor de passo de ímã permanente, tem a bobina a1-b1 sendo percorrida pela corrente I. O sentido 3 dessa corrente é tal que um pólo magnético norte (N) surge no pólo (físico) da parte inferior do estator, e um pólo magnético sul (S), no pólo físico da parte superior. Assim, as forças magnéticas que surgem entre os pólos do ímã do rotor e dos pólos do estator, devido à interação dos campos magnéticos nestes, fazem com que este rotor gire até a posição de equilíbrio, conforme mostra a figura a seguir. Se logo após o rotor atingir esta posição, a bobina a1-b1 for desenergizada, e logo em seguida, energizada a bobina a2-b2 com o sentido da corrente elétrica partindo do terminal a2 para o b2, as forças magnéticas, agora entre os pólos direito e esquerdo do estator e o ímã do rotor, farão deslocar este rotor de 90° no sentido anti-horário. O rotor atingirá então, sua nova posição de equilíbrio com os seus pólos alinhados com os pólos direito e esquerdo dos estator.
(^2) A relutância é a grandeza magnética que mede a “dificuldade” que os materiais apresentam de serem atravessados por fluxo magnético devido ao
campo magnético no qual este material está inserido. É uma grandeza análoga à resistência elétrica. (^3) Aqui se considera o sentido convencional da corrente elétrica que é o que considera o fluxo de cargas positivas. O sentido real é o devido ao fluxo de cargas negativas (elétrons).
Figura 1 – Partes Principais de um Motor de Passo
Algumas Aplicações dos Motores de Passos
A utilização em larga escala dos motores de passo começou com máquinas de comando numérico (CNC) para produção e mais tarde em periféricos de computador e equipamentos de escritório, quando então, os motores DC ou motores DC sem escovas substituíram o motor de passo nas máquinas de comando numérico. Nesta seção serão examinadas as várias aplicações dos motores de passo.
Periféricos de computador
Este campo é considerado a principal área de aplicação do motor de passo. Há uma grande variedade de periféricos para computadores. A proliferação de desktops e de laptops nos anos 80 estimulou o desenvolvimento de pequenos motores para uso em disk drives (Drives de disquete) e em impressoras. Vejamos alguns dispositivos principais que empregam motores de passo.
Impressoras
Há diversos tipos de impressoras que utilizam motores de passo para várias finalidades. Outros tipos de motores também são usados; por exemplo, varredores poligonais em impressoras a laser utilizam motores DC sem escovas. Entretanto, estas usam os motores de passo para a alimentação de papel, para a rotação do cilindro fotossensível, e para a operação da unidade de agitação do toner. A Fig. 1 mostra a construção e o conceito básicos de aplicações de motores em um tipo de impressora serial de impacto de caracter. Neste tipo de impressora os tipos de fonte e o número dos caracteres são limitados e o nível de ruído é elevado. As impressoras a jato de tinta ganharam terreno nos últimos anos (a Fig. 2 mostra a construção básica). As impressoras a jato de tinta se caracterizam pela elevada velocidade de impressão, baixo ruído e são capazes de imprimir uma variedade de fontes. Os milhares dos caracteres em chinês e japonês podem também ser impressos, apesar da qualidade da cópia ser um tanto inferior àquela obtida pela impressora a laser. Os motores de passo são usados no transporte do cabeçote de impressão e no mecanismo de alimentação de papel em impressoras a jato de bolha, sendo que o movimento do motor é transmitido através de um trem de engrenagens ao eixo principal (veja Fig. 3).
Figura 5 – Plotter Gráfico da HP9872B
Figura 6 – Mecanismo de um plotter gráfico que utiliza dois motores de passo
Figura 7 – Plotter gráfico para folha A
Tipos de Motores de Passo
Existem três tipos principais de motores de passo:
- Motores de Ímã Permanente (PM – Permanent Magnet)
- Motores de Relutância Variável (VR – Variable Reluctance)
- Motores Híbridos (Hb - Hybrid)
Ainda podemos ter a classificação quanto à existência ou não de derivação central nas bobinas que compõem o enrolamento:
- Unipolar – cada bobina possui uma derivação central.
- Bipolar – as bobinas não possuem derivação central.
Motores de Relutância Variável (VR – Variable Reluctance)
Um motor de passo de relutância variável não possui ímã permanente em seu rotor. Assim o rotor gira livremente sem torque residual (“Detent Torque”) quando o motor está desenergizado. A saída de torque para uma dada dimensão da estrutura é restrita, embora a taxa de torque por inércia seja boa, sendo que este tipo de motor é freqüentemente empregado em pequenas dimensões para aplicações como mesas de microposicionamento. Motores V.R. são pouco utilizados em aplicações industriais. Não possuindo magneto permanente, eles não são sensíveis à polaridade da corrente e necessitam de um arranjo de driver diferente dos outros tipos de motor.
Relutância é a propriedades que uma material oferece ao fluxo magnético. Os motores V.R. se aproveitam do fato de uma peça de material ferroso sempre se alinhar com a direção na qual a relutância é mínima, quando num campo magnético.
Figura 8 - Motor de relutância variável.
Motores de Ímã Permanente (PM – Permanent Magnet)
É talvez o tipo de motor mais amplamente utilizado para aplicações não industriais. Ele é essencialmente um dispositivo de baixo custo, baixo torque e baixa velocidade ideal para aplicações em campos como periféricos de informática. A construção do motor resulta em ângulos de passo relativamente grandes, porém a simplicidade geral permite a produção em larga escala a custo muito baixo. O motor de vão axial ou disco é uma variação do projeto de magneto permanente que apresenta um melhor desempenho, em grande medida devido à inércia muito baixa do motor. No entanto, isto restringe as aplicações do motor às que envolvem baixa inércia caso seja exigido todo o desempenho do motor.
Motor Unipolar
Os motores de passo unipolares são facilmente reconhecidos pela derivação central em cada um das bobinas. O número de fases é duas vezes o número de bobinas, uma vez que cada bobina se encontra dividida em duas. Na figura a seguir temos a representação de um motor de passo unipolar de 4 fases (1a, 2a, 1b e 2b). A fase 1a vai da derivação central até à extremidade a na bobina 1, e a fase 1b, da derivação central à extremidade b, nesta mesma bobina. As fases na bobina 2 se dão de forma análoga à bobina 1.
Normalmente, a derivação central das bobinas é ligada ao positivo da fonte de alimentação e os extremos de cada bobina são ligados seqüencialmente ao terra por um circuito apropriado (controlador mais driver), conforme o modo de acionamento adotado, para assim produzir o movimento de rotação contínuo numa direção. Os modos de acionamento e os circuitos de acionamento e controle serão abordados mais adiante.
Figura 11 - Motor de Passo Unipolar com quatro fases
Na figura anterior, ainda podemos ver o corte transversal de um motor com um passo de 30 graus. A bobina 1 encontra- se distribuída entre o pólo superior e pólo inferior do estator do motor, enquanto que a bobina 2 encontra-se distribuída entre o pólo esquerdo e o pólo direito do estator. O rotor, neste caso, é um ímã permanente com seis pólos (3 pólos sul e 3 pólos norte), dispostos ao longo da circunferência do rotor. Para uma resolução angular maior, o rotor deverá conter proporcionalmente mais pólos.
Na figura anterior, vamos considerar que as fases do motor estejam distribuídas da seguinte forma: 1a no pólo superior, 1b no pólo inferior, 2a no pólo direito e 2b no pólo esquerdo. A corrente ao fluir da derivação central da bobina 1 para o terminal a (fase 1a) faz com que o pólo superior do estator seja um pólo norte, atraindo o pólo sul do rotor que esteja mais próximo. Esta situação provoca um deslocamento do rotor para a posição indicada na figura anterior. Se a fase 1a for desenergizada e for energizada a fase 2a, o rotor irá deslocar-se 30º, ou seja, um passo no sentido anti-horário. Para obter uma rotação contínua do motor, suas as fases deverão ser alimentadas seguindo uma seqüência adequada.
Motor Bipolar
Os motores bipolares são constituídos por bobinas sem derivação central. Por este fato, estas bobinas devem ser energizadas de tal forma que a corrente elétrica flua na direção inversa a cada dois passos para permitir o movimento contínuo do rotor, ou seja, a polaridade deve ser invertida durante o funcionamento do motor.
Conforme pode ser visto na figura a seguir, no exemplo de motor bipolar apresentado, temos duas bobinas 1 e 2. No caso do motor bipolar, agora temos número de fases igual ao número de bobinas que compõem o enrolamento do motor. Então temos as fases 1ab e 2ab.
Os motores de passo bipolares são conhecidos por sua excelente relação tamanho/torque: eles proporcionam um maior torque, cerca de 40% a mais, comparativamente a um motor unipolar do mesmo tamanho. Isto se deve ao fato de que quando se energiza uma fase, se magnetiza ambos os pólos em que a fase (ou bobina) está instalada. Assim, o rotor sofre a ação de forças magnéticas de ambos os pólos, ao invés de apenas um, como acontece no motor unipolar.
Figura 12 - Motor de Passo Bipolar com duas fases
Modos de Acionamento dos Motores de Passo
Passo Completo (“Full Step”)
Este modo de acionamento se caracteriza pelo fato de que o motor desloca seu rotor em passo completo a cada pulso de acionamento que recebe em suas a fases a partir do circuito de acionamento. Os circuitos de acionamento serão abordados mais adiante.
Neste modo, podemos ter os seguintes, digamos, submodos:
Modo Normal: quando duas fases são energizadas ao mesmo tempo a cada passo. Modo Wave: quando somente uma fase é energizada por vez a cada passo.
Modo Passo Completo Wave (Menor torque, menor consumo que o modo normal)
Como exemplo, assumindo uma lógica positiva, em que o valor lógico 1 significa fazer fluir corrente numa das fases, a seguinte seqüência, apresentada na tabela a seguir, produzirá um deslocamento de oito passos (8´30=240º), para o exemplo de motor unipolar da figura 11.
Tabela 2 – Seqüência de acionamento do motor unipolar da fig. 11 no modo passo completo wave para 240° de deslocamento.
passo 1a 2a 1b 2b 1^1 0 0 2^0 1 0 3^0 0 1 4^0 0 0 5^1 0 0 6^0 1 0 7^0 0 1 8^0 0 0
Modo Passo Completo Normal (Maior torque, maior consumo que o modo wave)
Ainda é possível utilizar uma outra estratégia de acionamento em que o torque produzido num motor unipolar é 1, vezes maior. Neste tipo de acionamento são energizadas duas fase simultaneamente para cada passo. Assim, dois pólos adjacentes são magnetizados. Com isso, o rotor atinge o equilíbrio em uma posição intermediária entre estes dois pólos magnetizados. O preço a pagar é um consumo de energia elétrica duas vezes superior ao da estratégia do modo full-step wave. Esta estratégia de acionamento encontra-se exemplificada na tabela a seguir onde, mais uma vez, o rotor é deslocado 240º.
Detalhe Quanto ao Torque Produzido no Modo Meio-Passo
Supondo que o circuito de acionamento do motor (driver) forneça a mesma corrente para cada fase, isto fará com que seja produzido um torque maior quando houver duas fases energizadas. Em outras palavras, os passos serão alternadamente fortes e fracos. Isto não significa uma limitação importante no desempenho do motor - o torque disponível é obviamente limitado pelo passo mais fraco, porém haverá uma melhoria significativa na suavidade do movimento a baixas velocidades no modo de passo completo.
Obviamente, gostaríamos de produzir um torque aproximadamente igual em todos os passos, e este torque deveria estar ao nível do passo mais forte. Podemos obter isso empregando um nível mais alto de corrente quando houver apenas uma fase energizada. Isto não provoca dissipação excessiva de potência do motor, implicando em aumento excessivo da temperatura da carcaça deste motor, pois a classificação de corrente do fabricante supõe que duas fases estejam sendo energizadas (a classificação de corrente se baseia na temperatura permissível na carcaça). Com apenas uma fase energizada, se dissipará o mesmo total caso a corrente seja elevada em 40%. Empregando esta corrente mais alta no estado de apenas uma fase ligada produz-se um torque aproximadamente igual nos passos alternados.
Micro-Passo (Microstepping)
Verificamos que se duas fases forem energizadas com correntes iguais produz uma posição de passo intermediária a meio caminho entre as posições em que há uma fase única ligada. Caso as correntes nas duas fases sejam desiguais, a posição do rotor será deslocada em direção ao pólo mais forte. Este efeito é empregado no driver de micro-passo , que subdivide o passo básico do motor estabelecendo uma escala proporcional da corrente nas duas fases. Desta forma, o tamanho do passo é diminuído e a suavidade do movimento em baixas velocidades é sensivelmente melhorada. Os drivers de micro-passo de alta resolução dividem o passo do motor em até 500 micro-passos, propiciando 100. passos por revolução no caso de um motor de passo com 200 passo por volta (tipo mais comum no mercado). Nesta situação, o padrão de corrente nas fases é muito semelhante a ondas senoidais com um deslocamento de fase de 90° �entre elas (veja a Fig. a seguir).
Figura 17
Figura 13 - Correntes de fase no modo de Micro-Passo.
O motor está agora sendo acionado de forma muito semelhante ao que seria um motor síncrono CA convencional. Na verdade, o motor de passo pode ser acionado desta forma a partir de uma fonte com onda seno de 50 Hz com a inclusão de um capacitor em série com uma das fases. Ele girará a 60 rpm.
Análise Detalhada do Funcionamento de um Motor de Passo
Análise do Funcionamento de um Motor de Passo do Tipo Híbrido
A operação do motor híbrido pode ser compreendida mais facilmente analisando-se um modelo muito simples que produzirá 12 passos por revolução (vide figura a seguir).
Figura 10
Figura 14 - Motor híbrido simples de 12 passos/revolução.
O rotor desta máquina consiste de duas peças de pólo com três dentes cada uma. Entre estas peças de pólo há um magneto permanente magnetizado em paralelo com o eixo do rotor, tornando uma ponta um pólo norte e a outra um pólo sul. Os dentes são defasados nas extremidades norte e sul conforme mostrado no diagrama. O estator consiste de uma carcaça com quatro dentes que tem toda a extensão do rotor. As bobinas são enroladas sobre os dentes do estator e estão conectadas aos pares. Não havendo corrente fluindo em nenhuma bobina do motor, o rotor tenderá a assumir uma das posições mostradas na Figura a seguir. Isto se deve ao fato do magneto permanente no rotor estar tentando minimizar a relutância (ou “resistência magnética”) do percurso do fluxo de uma extremidade à outra. Isto ocorrerá quando um par de dentes do rotor nos pólos norte e sul estiverem alinhados com dois pólos do estator. O torque que tende a manter o motor em uma destas posições é em geral pequeno, e é chamado de “torque detentor”. O motor mostrado terá 12 posições possíveis de detenção.
Figura 11
Figura 15 - Passo completo, uma fase ligada.
O Motor Híbrido Padrão de 200 Passos
O motor de passo padrão opera da mesma forma que nosso modelo simples, porém possui um número maior de dentes no rotor e no estator, o que propicia um tamanho menor para o passo básico. O rotor é construído em duas seções como anteriormente, porém possui 50 dentes em cada seção. O deslocamento de meio dente entre as duas seções foi mantido. O estator possui 8 pólos, cada um com 5 dentes, perfazendo um total de 40 dentes (veja a Figura a seguir).
Figura 17
Figura 18 - Motor híbrido de 200 passos.
Se imaginarmos que um dente está colocado em cada um dos intervalos entre os pólos do estator, haveria um total de 48 dentes, dois a menos do que o número de dentes do rotor. Portanto, se os dentes do rotor e do estator estiverem alinhados na posição vertical superior (correspondente à posição de 12 horas de um ponteiro de relógio), eles também estarão alinhados na posição vertical das 6 horas. Nas posições correspondentes a 3 e 9 horas os dentes estarão desalinhados. No entanto, devido ao deslocamento entre os conjuntos de dentes do rotor, o alinhamento ocorrerá nas posições correspondentes a 3 e 9 horas na outra extremidade do rotor. As bobinas estão arranjadas em conjuntos de quatro, e enroladas de forma tal que os pólos diametralmente opostos são equivalentes. Portanto, em referência à Fig. 17, os pólos norte nas posições de 12 e 6 horas atraem os dentes pólo sul na parte frontal do rotor; e os pólos sul nas posições de 3 e 9 horas atraem os dentes pólos norte na parte traseira. Ao se mudar a corrente para o segundo conjunto de bobinas, o padrão do campo magnético do estator gira 45°. No entanto, para alinhar este novo campo, o rotor precisa girar apenas 1,8°. Isto equivale a um quarto de giro de dente no rotor, o que resulta em 200 passos por revolução.
Observe que há o mesmo número de posições detentoras quanto passos por revolução, normalmente 200. As posições detentoras correspondem aos dentes do rotor estando totalmente alinhados com os dentes do estator. Ao se aplicar energia a um driver de passo, é usual que ele se energize no estado de “fase zero”, onde há corrente em ambos os conjuntos de bobinas. A posição resultante do rotor não corresponde a uma posição detentora natural, portanto um motor sem carga se moverá, pelo menos, meio passo no momento da energização. É claro que, se o sistema foi desligado num estado diferente do de fase zero, ou se o motor for movimentado enquanto desligado, poderá ocorrer um movimento maior no momento da energização. Outro ponto a se lembrar é o de que, para um dado padrão de corrente nas bobinas, o número de posições estáveis é igual ao de dentes do motor (50 para um motor de 200 passos).
Caso um motor saia de sincronismo, o erro posicional resultante sempre será equivalente a um número inteiro de dentes do rotor ou um múltiplo de 7,2°. O motor, propriamente dito, não pode “perder” passos individuais - erros de posição, de um ou dois passos, devem ser atribuídos a ruído, pulsos de passo falsos ou perdidos, ou falha do controlador.
Bobinas Bifilares
A maior parte dos motores é descrita como sendo de “bobinas bifilares”, o que significa que há dois conjuntos idênticos de bobinas em cada pólo. Dois filamentos são enrolados juntos como se fossem uma única bobina. Isto produz duas bobinas que são quase idênticas elétrica e magneticamente, se ao invés disso uma bobina fosse enrolada sobre a outra, mesmo tendo o mesmo número de voltas, as características magnéticas seriam diferentes. Em termos simples, enquanto quase a totalidade do fluxo da bobina interna fluiria pelo núcleo ferroso, parte do fluxo da bobina externa fluiria pelo enrolamento da bobina interna. A origem da bobina bifilar data do driver unipolar. Ao invés de ser preciso reverter a
corrente em uma bobina, o campo poderá ser revertido transferindo-se a corrente para uma segunda bobina enrolada na direção oposta. (Embora as duas bobinas sejam enroladas da mesma forma, trocando-se suas pontas produz-se o mesmo efeito.) Portanto, com um motor de bobinas bifilares, pode-se manter um projeto simples para o driver. No entanto, este requisito já praticamente desapareceu atualmente, com a ampla disponibilidade do driver bipolar, de maior eficiência. No entanto, os dois conjuntos de bobinas realmente proporcionam uma flexibilidade maior, e veremos que diferentes métodos de conexão podem ser empregados para propiciar características alternativas para torque e velocidade.
Caso todas as bobinas em um motor bifilar de duas fases sejam retiradas separadamente, teremos um total de 8 terminais (veja a figura a seguir). Esta é a configuração mais comum, pois propicia a maior flexibilidade. No entanto, há ainda alguns poucos motores que são produzidos com apenas 6 terminais, com um terminal atuando como conexão comum a cada bobina num par bifilar. Este arranjo limita a flexibilidade, pois as bobinas não podem ser conectadas em paralelo. Alguns motores são construídos com apenas 4 terminais, porém estes não têm bobinas bifilares e não podem ser utilizados com um driver unipolar. Obviamente não há um modo alternativo de conexão para um motor de 4 terminais, porém para muitas aplicações isto não constitui desvantagem, e ainda se evita o problema do isolamento de terminais não utilizados.
Figura 18
Figura 19 - Configurações de terminais de motores.
Ocasionalmente pode-se encontrar um motor de 5 terminais. Estes não são recomendados, pois não podem ser utilizados com drivers bipolares convencionais, pois requerem isolamento adicional entre as fases.
Características de Desempenho de um Motor de Passo (torque,
velocidade...)
Quanto ao Torque Estático de Retenção, ou simplesmente, Torque de Retenção
(Holding Torque)
A figura a seguir ilustra a curva de torque estático do motor. Isto se refere a um motor que está energizado porém estacionário, e mostra como o torque varia com a posição do rotor quando este é deslocado do ponto de equilíbrio (rotor travado pelas forças magnéticas entre os pólos do estator e rotor). Estamos supondo que não há atrito nem outras cargas estáticas aplicadas ao motor com a movimentação do rotor para longe da posição de equilíbrio. O torque aumenta de forma estável até atingir um ponto máximo após um passo completo. Este valor máximo é denominado torque de retenção ( holding torque ), e representa a maior carga estática que pode ser aplicada ao eixo sem causar rotação contínua. No entanto, isto não nos informa o torque máximo de operação do motor - este é sempre menor do que o torque de retenção. Tipicamente, o torque máximo de operação está em torno de 70% do torque de retenção ( holding torque ).
Figura 20
Figura 21 - Resposta de um único passo
A tentativa de se aplicar ao motor um passo que corresponda à sua freqüência natural de oscilação pode provocar uma resposta exagerada conhecida como ressonância. Em casos graves, isto pode levar à falta de sincronismo, ou “perda de passo” (stalling), do motor. Este problema é incomum com drivers de meio-passo, e ainda menos comum com um micro-passo. A velocidade natural de ressonância está tipicamente na faixa de 100 a 200 passos completos/segundo. Em condições dinâmicas incluindo todas as variáveis, o desempenho do motor é descrito por uma curva de torque e velocidade como a mostrada na figura a seguir. Há duas faixas de operação, a faixa de partida/parada (ou “pull in”) e a faixa de rendimento (“slew” ou “pull out”).
Figura 21
Figura 22 - Curvas de partida / parada e rendimento.
Na faixa de início/parada, o motor pode ser acionado ou parado com a aplicação de pulsos de passo a uma freqüência constante no driver. Em velocidades dentro desta faixa, o motor possui torque suficiente para acelerar sua própria inércia até uma velocidade de sincronismo sem que a defasagem de posicionamento exceda dois passos. É óbvio que, se uma carga inercial for adicionada, esta faixa de velocidade é reduzida. Portanto, a faixa de início/parada depende da inércia da carga.
Para operar o motor em velocidades mais elevadas, é necessário iniciar numa velocidade dentro da faixa de partida/parada e então acelerar o motor para a região de rendimento. De forma semelhante, ao parar o motor, ele deve ser desacelerado de volta à faixa de partida/parada antes de se desativar os pulsos de passo. O uso da aceleração e desaceleração, ou “ramping”, permite que velocidades muito mais elevadas possam ser obtidas, e em aplicações industriais a faixa útil de velocidade se estende até cerca de 3.000 rpm.
Observe que a operação contínua em altas velocidades não é normalmente recomendada para um motor de passo devido ao aquecimento do motor, porém podem-se utilizar altas velocidades com sucesso em aplicações de posicionamento. O torque disponível na faixa de rendimento não depende da inércia da carga. A curva de torque e velocidade é normalmente medida colocando-se o motor em movimento e então aumentando a carga até que o motor perca o passo. Com uma carga de inércia mais elevada, deve ser utilizada uma taxa de aceleração mais baixa, porém o torque disponível na velocidade final não é afetado.
Circuitos Básicos de Acionamento de Motor de Passo
O sistema eletrônico completo para o acionamento de um motor de passo é mostrado no diagrama em blocos funcionais na figura a seguir.
Controlador
Driver
Passo
Direção
Passo
Direção
Figura 23 – Sistema Eletrônico Completo de Acionamento de um Motor de Passo
O bloco controlador, ou seqüenciador, é responsável por gerar a seqüência de pulsos responsáveis por acionar o motor em um deslocamento contínuo.
A seguir, serão descritos os circuitos acionador e controlador.
Circuitos Acionadores (Drivers)
Acionador Unipolar
Para um motor de passo unipolar, o mais comum é ligar as derivações centrais de cada bobina e então aplicar o terra em cada extremidade destas, seguindo uma seqüência adequada, conforme o modo e acionamento adotado. Esta seqüência de pulsos é gerada por um outro circuito, o controlador. Este por sua vez, envia os pulsos gerados ao circuito acionador (driver) que é projetado apropriadamente para trabalhar com correntes mais altas. Na figura a seguir, temos um exemplo de circuito driver para motores unipolares.
Figura 24 – Circuito Acionador Unipolar