Baixe Os pontos de lagrange e outras Trabalhos em PDF para Física, somente na Docsity!
TRABALHO DO XXVII NORTE E NORDESTE DE FÍSICA / BELÉM - PARÁ - 2009
CÁLCULOS BASEADOS NA OBRA DE NICOLE FIELDS COM O TÍTULO DE LAGRANGE POINTS E
O TRABALHO DE NEIL J. CORNISH (NASA)
ALUNO: Will Robson Monteiro Rocha IF-CE
1. BASTIDORES E BREVE HISTÓRICO SOBRE OS PONTOS DE LAGRANGE Os pontos de Lagrange recebem esse nome porque o primeiro a descobri-los foi o matemático Francês-Italiano Joseph Louis Lagrange que estudou o problema dos três corpos restrito, ou seja, quando a terceira massa é muito menor que as outras duas. Ele o estudou para o caso particular de uma órbita circular em 1772. São pontos de equilíbrio estabelecidos na vizinhança de dois corpos massivos orbitando o seu centro de massa. Na realidade, sabemos hoje que o problema dos três corpos no caso geral é caótico e não tem uma solução definida, porém com as aproximações feitas por Lagrange chegamos a bons resultados. Os pontos de Lagrange são cinco, sendo que três deles são instáveis e dois estáveis. Eles são conhecidos como L 1 , L 2 , L 3 e L 4 , L 5. Mesmo em sua forma mais simples, o problema dos três corpos restrito tem muitas aplicações dentro do sistema solar, como os casos de Sol-Terra, Sol-Jupiter e Terra-Lua. 2. DEMONSTRAÇÃO DOS PONTOS DE LAGRANGE O método que vamos utilizar será dado pela força total aplicada a uma massa de teste m muito pequena, e encontraremos algumas soluções fazendo a decomposição dessa força em suas componentes apropriadas. Este método pode parecer matematicamente mais complicado, mas seu conceito é mais facilmente compreendido. Veja a figura abaixo:
A força total das massas m 1 e m 2 , girando com freqüência angular ω , sobre a terceira massa é dado por:
𝐹𝑚 = −
𝑟 1 ′^3
𝑟 2 ′^3
− 2 𝑚𝜔 × 𝑣𝑟 − 𝑚𝜔 × 𝜔 x 𝑟 (1)
A força de Coriolis e a força centrífuga foram colocados na eq. (1) porque o sistema está girando, então quando estamos num referencial não inercial, ou seja um referencial que não está em repouso em relação aos outros, então algumas forças fictícias passam a existir, e nesse caso Coriolis e centrífuga. Para o caso em que a massa m não está em movimento, então a força de Coriolis é zero e, portanto não podemos utilizá-la para encontrar os pontos de Lagrange. Contudo ela se torna necessária para estudar o a estabilidade de L 4 e L 5.
Da terceira lei de Kepler, nós podemos determinar a freqüência angular de rotação, ω :
𝑇^2 =
4 𝜋^2
∙ 𝑅^3 (2)
Como: ω = 2πf e T = 1/f então:
𝜔^2 =
𝑅^3
onde R é a separação total entre m 1 e m 2.
Nos pontos de equilíbrio Fm = 0. Da figura 1 podemos ver que a massa m tem coordenadas ( x,y ), e o centro de massa está na origem do sistema, com m 1 e m 2 ao longo do eixo x com as coordenadas (– r 1 ,0 ) e (r 2 ,0 ) respectivamente, onde r 1 + r 2 = R e os vetores posição de m 1 e m 2 até m são:
Sabemos que: 𝑟 = 𝑥 − 𝑥𝑜 𝑖 + 𝑦 − 𝑦𝑜 𝑗 e yo = 0, logo:
𝑟 1 ′^ = 𝑥 + 𝑟 1 𝑖 + 𝑦𝑗 (4)
𝑟 2 ′^ = 𝑥 − 𝑟 2 𝑖 + 𝑦𝑗 (5)
A magnitude dos vetores é dado por:
𝑟 1 ′^2 = 𝑥 + 𝑟 1 2 + 𝑦^2 (6)
𝑟 2 ′^2 = 𝑥 − 𝑟 2 2 + 𝑦^2
Como o movimento acontece no plano x-y , então temos que ω é:
𝜔 = 𝜔𝑘 (8)
Usando a equação (8) e sabendo que 𝑟 = 𝑥𝑖 + 𝑦𝑗, vamos calcular a força centrífuga nos termos de −𝑚𝜔 × 𝜔 x 𝑟.
𝜔 x 𝑟 = 𝜔𝑘 × 𝑥𝑖 + 𝑦𝑗 = 𝜔𝑥𝑗 − 𝜔𝑦𝑖 9
𝜔 × 𝜔 x 𝑟 = 𝜔𝑘 × 𝜔𝑥𝑗 − 𝜔𝑦𝑖 = −𝜔^2 𝑥𝑖 − 𝜔^2 𝑦𝑗 = −𝜔^2 𝑟 10
−𝑚𝜔 × 𝜔 x 𝑟 = 𝑚𝜔^2 𝑟 11
Portanto usando essa forma da força centrífuga, e tendo desprezado a força de Coriolis devido ao não movimento da massa m , temos que a força que atua na massa m será dado por:
𝑟 1 ′^3
𝑟 2 ′^3
+ 𝑚𝜔^2 𝑟 12
𝑟 1 ′^3
𝑟 2 ′^3
+ 𝑚𝜔^2 𝑥𝑖 + 𝑦𝑗 13
Daí:
𝑟 1 ′^3
𝑟 2 ′^3
+ 𝑚𝜔^2 𝑥 14
𝑟 1 ′^3
𝑟 2 ′^3
+ 𝑚𝜔^2 𝑦 15
Nossas soluções são para Fm = 0 e ambas as componentes 𝑥 𝑒 𝑦 são diferente de 0. Agora vamos encontrar os pontos de Lagrange no eixo x , logo temos que Fmy = 0 , pois y = 0.
Assim, como C.M = 0, encontramos que: 𝑚 1 𝑟 1 = 𝑚 2 𝑟 2 27 Vamos agora escrever r 1 e r 2 em função das novas variáveis que introduzimos μ 1 e μ 2 :
𝑟 1 =
𝑟 1 + 𝑟 2 = R = 1 29
Pelo mesmo processo encontramos: 𝑟 1 = 𝜇 2 33 Vamos agora reescrever a equação (25) em termos das equações (32) e (33):
Como 𝑟 1 + 𝑟 2 = 1, então 1 − 𝜇 2 = 𝜇 1 35 Agora vamos rearranjar a equação (34) em função de apenas um parametro:
Neste ponto, em vez de escrevermos apenas a variavel x , usaremos a notação: a = x + μ 2. Assim temos a equação (36) no seguinte formato:
Desenvolvendo esses termos: 𝐼 1 − 𝜇 2 𝑎^2 − 2 𝑎 + 1 + 𝐽𝜇 2 𝑎^2 + 𝑎 − 𝜇 2 𝑎^2 𝑎^2 − 2 𝑎 + 1 = 0 39
𝐼 𝑎^2 − 2 𝑎 + 1 − 𝜇 2 𝑎^2 + 2𝑎𝜇 2 − 𝜇 2 + 𝐽𝜇 2 𝑎^2 + 𝑎 − 𝜇 2 𝑎^4 − 2 𝑎^3 + 𝑎^2 = 0 40
𝐼𝑎^2 − 2 𝐼𝑎 + 𝐼 − 𝐼𝜇 2 𝑎^2 + 2𝐼𝑎𝜇 2 − 𝜇 2 𝐼 + 𝐽𝜇 2 𝑎^2 + 𝑎^5 − 2 𝑎^4 + 𝑎^3 − 𝜇 2 𝑎^4 + 2𝑎^3 𝜇 2 + 𝜇 2 𝑎^2 = 0 41
𝑎^5 − 2 𝑎^4 + 𝑎^3 + 𝐼 𝑎^2 − 2 𝑎 + 1 − 𝜇 2 𝐼𝑎^2 − 2 𝐼𝑎 + 𝐼 − 𝐽𝑎^2 + 𝑎^4 − 2 𝑎^3 + 𝑎^2 = 0 42
𝑎^5 − 2 𝑎^4 + 𝑎^3 + 𝐼 𝑎^2 − 2 𝑎 + 1 𝑃𝐴
− 𝜇 2 𝑎^4 − 2 𝑎^3 + 𝑎^2 𝐼 − 𝐽 + 1 + 𝐼 1 − 2 𝑎
𝑃𝐵
Infelizmente (ou não) esta é uma equação de quinta ordem em a e não pode ser resolvida analiticamente para valores arbitrários de μ 2. Contudo, para muitos casos no sistema solar, esta solução se torna mais fácil, pois podemos considerar o valor de μ 2 muito pequeno. Essa suposição não deve nos assustar, pois, como já falamos casos como o sistema Sol-Terra, Sol-Jupiter, Terra-Lua ou ainda casos de estrelas binárias onde a companheira da outra estrela é tem menor massa como, por exemplo, o caso das estrrelas Sírius A e Sírius B.
Aqui vamos fazer a separação dos casos para diferentes valores de I e J , onde esses sinais serão dados com o auxílio dos comentário que fizemos algumas páginas antes.
𝐼 = 1, 𝐽 = 1
𝑎^5 − 2 𝑎^4 + 𝑎^3 + 𝑎^2 − 2 𝑎 + 1 − 𝜇 2 𝑎^4 − 2 𝑎^3 + 𝑎^2 − 2 𝑎 + 1 = 0 45 𝐼 = −1, 𝐽 = 1 𝑎^5 − 2 𝑎^4 + 𝑎^3 − 𝑎^2 + 2𝑎 − 1 − 𝜇 2 𝑎^4 − 2 𝑎^3 − 𝑎^2 + 2𝑎 − 1 = 0 46 𝐼 = −1, 𝐽 = − 1
𝑎^5 − 2 𝑎^4 + 𝑎^3 − 𝑎^2 + 2𝑎 − 1 − 𝜇 2 𝑎^4 − 2 𝑎^3 + 𝑎^2 + 2𝑎 − 1 = 0 47 Para cada uma das três equações acima podemos considerar μ 2 = 0, pois vejamos dois exemplos:
Caso Sol-Terra: 𝜇 2 =
1024 + 10^30
= 10−^6
Caso Terra-Lua:
1022 + 10^24
= 10−^2
Portanto, das equações (45), (46) e (47), o que resta é:
Quando I = 1 𝑎^5 − 2 𝑎^4 + 𝑎^3 + 𝑎^2 − 2 𝑎 + 1 = 0 50 Iremos agora, baixar a ordem a equação pelo dispositivo de Briott-Ruffini. i. Se a = -1 , toda a equação (51) se anula, logo -1 é raiz da mesma. Portanto, temos que:
1 -2 1 1 -2 1 - 1 -3 4 -3 1 0
Logo a equação fica reescrita assim: ( a + 1)(a^4 – 3a^3 + 4a^2 – 3a +1)=
ii. Para a equação acima, a raiz é a = 1 , Daí, temos que:
1 -3 4 -3 1 1 1 -2 2 -1 0
A equação (50) fica: ( a + 1) ( a - 1)(a^3 – 2a^2 +2a – 1)
iii. Da mesma forma que antes, a raiz da equação do terceiro grau é a = 1, Portanto:
1 -2 2 -1 1 1 -1 1 0
É claramente perceptível que os termos da equação (58) se cancelam, portanto vamos expandir a segunda ordem:
10 𝑏^2 𝜇 22 𝛼^ − 2 6 𝑏^2 𝜇 22 𝛼^ + 3 𝑏^2 𝜇 22 𝛼^ − 𝑏^2 𝜇 22 𝛼^ + 𝜇 2 = 0 59
Podemos ver que os termos da segunda ordem, também se cancelam, daí vamos expandir a terceira ordem, que fica:
10 𝑏^3 𝜇 23 𝛼^ − 2 4 𝑏^3 𝜇 23 𝛼^ + 𝑏^3 𝜇 23 𝛼^ + 𝜇 2 = 0 60
Agora temos que 3b^3 μ 2 3α^ = – μ 2 , portanto, concluímos que b = (-1/3)-1/3^ e que α =1/3.
Finalmente temos que 𝑎 = 1 − 𝜇 22
1 (^3).
Usando a equação (47), e aplicando a mesma expansão para a = 1+bμ 2 α, os termos da 1a^ e da 2a
ordem se cancelam, ficando apenas 3b^3 μ 2 3α^ = μ 2. Analogamente encontramos que 𝑎 = 1 + 𝜇 22
1 (^3).
Substituindo alguns valores, para o sistema Sol-Terra, μ 2 = 3·10-6 , assim os três pontos no eixo x
são L 1 = 1 − 𝜇 22
1 (^3) , L 2 =^ 1 +^
𝜇 (^2) 2
1 (^3) e L 3 =^ =^ −1 + 7 12 𝜇^2.^ Daí substituindo o valor de^ μ^2 para esse caso temos que: L 1 =0,99 UA, L 2 = 1,01 UA e L 3 =- 0, UA (Figura 2). Contudo não quero deixar transparecer que os pontos L 1 e L 3 , estão à mesma distância do Sol, mas L 3 tem uma valor um pouco menor.
2.2 DEMONSTRAÇÃO DE L 4 e L 5
Agora vamos encontrar os pontos de Lagrange no eixo y , e para isso iremos contar com o auxílio da equação (13) na forma:
𝑟 1 ′^3
𝑟 2 ′^3
+ 𝑚𝜔^2 𝑥𝑖 + 𝑦𝑗
Logo, rearranjando a equação acima podermos reescrevê-la assim:
𝑟 1 ′^3
𝑟 1 ′^3
𝑟 1 ′^3
𝑟 2 ′^3
𝑟 2 ′^3
𝑟 2 ′^3
+ 𝑚𝜔^2 𝑟
𝑟 1 ′^3
𝑟 2 ′^3
+ 𝑚𝜔^2 𝑟 −
𝑟 2 ′^3
𝑟 1 ′^3
𝑟 1 ′^3
𝑟 2 ′^3
𝑟 1 ′^3
𝑟 2 ′^3
𝑅^3
𝑟 1 ′^3
𝑟 2 ′^3
Agora, se dividirmos tudo por G, m, (m 1 + m 2 ) , fazendo R = 1 e sabendo que Fm = 0 , obtemos:
𝑟 1 ′^3
𝑟 2 ′^3
𝑟 1 ′^3
𝑟 2 ′^3
Vamos escrever o vetor unitário 𝑥 em coordenada polares. Já sabemos que 𝑟 = 𝑥 cos 𝜃 + 𝑦 sin 𝜃 𝜃 = −𝑥 sin 𝜃 + 𝑦 cos 𝜃 (63)
Portanto, usando uma matriz de transformação temos que: 𝑥 𝑦 =^
cos 𝜃 −sin 𝜃 sin 𝜃 cos 𝜃
𝑟 𝜃 64 Que finalmente obtemos: 𝑥 = cos 𝜃𝑟 − sin 𝜃𝜃.
Daí substituindo 𝑥 em (62), chegamos a:
𝑟 1 ′^3
𝑟 2 ′^3
− 1 𝑟 + cos 𝜃
𝑟 1 ′^3
𝑟 2 ′^3
𝑟 + sin 𝜃
𝑟 1 ′^3
𝑟 2 ′^3
Na direção de 𝜃, temos que, se os valores de y ≠ 0, então θ ≠ 0, e daí sin 𝜃 ≠ 0. Logo apenas o outro termo pode ser zero. Daí:
𝜇 1 𝑟 1 𝑟 1 ′^3
𝑟 2 ′^3
= 0 => 𝑟 1 ′^3 = 𝑟 2 ′^3
Da mesma forma desenvolvida acima, podemos dizer que os termos em 𝑟 são:
𝜇 1 𝑟 1 ′^3
𝑟 2 ′^3
Com o auxílio de (33), (34) e (67), a equação (68) fica:
𝑟 2 𝑟 1 ′^3
𝑟 1 ′^3
𝑟 1 ′^3
𝑟 1 ′^3
Daí, chegamos a:
1 − 𝑟 1 ′^3 = 0 => 𝑟 1 ′^ = 𝑟 2 ′^ = 1 (69)
Finalmente, achamos que os dois últimos pontos de Lagrange, estão localizados nos vértices de um triângulo equilátero com as massas m 1 e m2. Estes pontos de Lagrange coincidem com as órbitas de corpos para o caso em que m 2 << m 1.
3. POTENCIAL GRAVITACIONAL NOS PONTOS DE LAGRANGE Como já calculamos as posições dos pontos de Lagrange, vamos agora calcular o potencial gravitacional generalizado em cada um desses pontos. Vejamos o a figura abaixo:
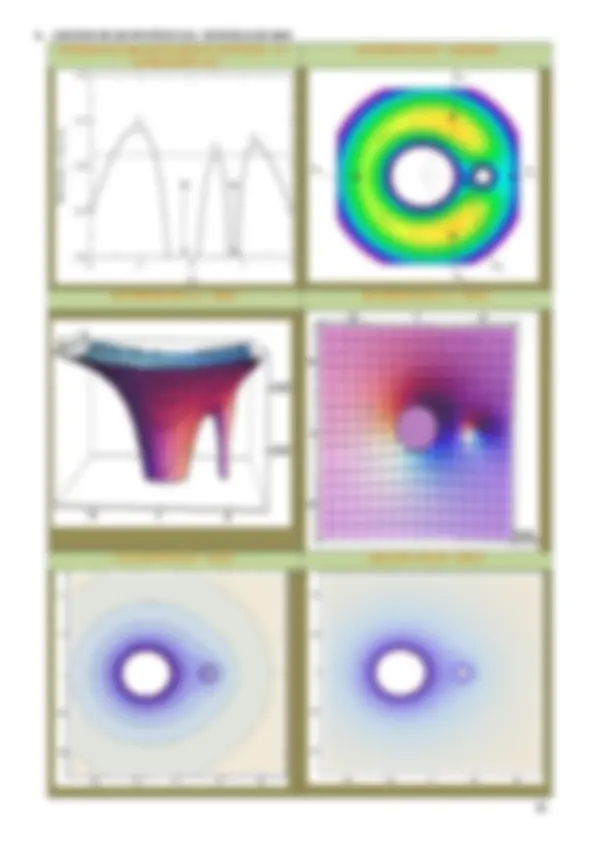
4. GRÁFICOS DO POTENCIAL GENERALIZADO POTENCIAL GRAVITACIONAL EFETIVO – X / ASTRONOMY 241
CONTOUR PLOT - CORNISH
MATHEMATICA 6 - WILL MATHEMATICA 6 - WILL
CONTOUR PLOT - WILL DENSITY PLOT - WILL
5. ANÁLISE DA ESTABILIDADE Já comentamos no início deste trabalho que os pontos de Lagrange são pontos de estabilidade, contudo ela pode ser instável ou estável. Usualmente estudamos os pontos de equilíbrio fazendo o gráfico do potencial efetivo e analisamos seus vales e selas. Contudo, falhamos usando simplesmente este critério, quando a velocidade depende do potencial: 𝑈𝜔 = 𝑈 − 𝑣 ∙ 𝜔 × 𝑟 − 1 2 𝜔^ ×^ 𝑟^ ∙^ 𝜔^ ×^ 𝑟^79 Assim, precisamos fazer uma análise linear da estabilidade de cada ponto. (cf. http://www.physics.montana.edu/faculty/cornish/lagrange.pdf).
Analisando o gráfico contour plot – Cornish, podemos interpretá-lo de forma análoga a uma altimetria geográfica. Assim, os pontos L4 e L5 estariam no topo de ―colinas‖ amplas, quase planas (daí a estabilidade), enquanto L1 (principalmente), L2 e L3 estariam em regiões semelhantes a selas, na confluência de encostas íngremes (daí a instabilidade).
As cores podem ser entendidas como o amarelo, num alto potencial e o violeta com baixo potencial.
ESTABILIDADE DE L 1 E L 2
Do gráfico do potencial efetivo ao longo de x , os potenciais próximos a L 1 e L 2 , mostram selas, e após sua análise linear encontramos que sua dinâmica é instável. O que coincide com a análise mais simples, pois em cada um desses pontos, o potencial é constante, implicando que a força resultante é nula. Contudo se pegarmos um ponto um pouco mais a frente ou atrás de L 1 , a força será diferente de zero, implicando numa instabilidade.
Qualquer corpo que for colocado nesses pontos terá de ser levado aos pontos de equilíbrio num período de aproximadamente 23 dias.
ESTABILIDADE DE L 3 Da ficção científica é o local do mítico Planeta X, cheio de criaturas invasoras. Também apresenta uma sela, e suas dinâmica é instável. Um corpo que estivesse lá deveria ser ajustado ao ponto L 3 a cada 150 dias.
ESTABILIDADE DE L 4 E L 5 A estabilidade ao redor de L 4 e L 5 nos reserva algumas surpresas. Cada um destes pontos corresponde ao local de máximo potencial generalizado, o que implicaria em equilíbrio instável, no entanto eles são estáveis. A estabilidade deles depende da força de Coriolis. Inicialmente uma massa situada próximo de L 4 ou L 5 deslizará para um baixo potencial, mas à medida que isso ocorre ela aumenta sua velocidade e a força de Coriolis passa a agir, enviando-a para o entorno dos pontos de Lagrange (L 4 ou L 5 ), que é o princípio básico para estudar o equilíbrio estável, pois se deslocarmos a partícula do seu ponto de equilíbrio uma força restauradora age nela fazendo com que ela volte ao seu estado original. O efeito é análogo à formação de um furacão na superfície da Terra: o ar atira-se para um sistema de baixa pressão e começa a girar por causa do efeito de Coriolis e um furacão estável está formado. (Figura 4) - Golsdtein
REFERÊNCIAS
[1] Neil J. Cornish, The Lagrange Points, http://www.physics. Montana.edu/faculty/cornish/lagrange.pdf. 25/08/
[2] Nicole Fields, Lagrange Points, http://hep.uchicago.edu/~rosner/p316/projs/fields.pdf. 10/09/
[3] C. Poole; H. Goldstein e J. Safko, Classical Mechanics, Addison-Wesley, 2002.
[4] Alonso, M; Finn, E. J., Física – um curso universitário, Edgard Blucher, 1972, v.1.
[5] Today in Astronomy 241: close binaries and accretion disks. www.pas.rochester.edu/~emamajek/AST 241 /AST 241 25.ppt._ 26/09/
[6] Wikipédia, Lagrangian Points, en. wikipedia .org/wiki/ Lagrangian ___ point. 26/09/