Baixe Análise de Transmissões Planetárias em Ferramentas de Torque: Estudo de um Driver Sem Fio e outras Notas de estudo em PDF para Engenharia Elétrica, somente na Docsity!
2.000 Planetary Gear Application & Derivation
Cordless Screw Driver:
Electric Motor
GT-
GT-
Screw Driver Shaft
Switch
MOTOR SHAFT
T
EM
ωωωω EM
T
GT-
ωωωω GT-
Battery Pack
SCREW DRIVER SHAFT
T
GT-
ωωωω GT-
GEAR TRAIN # 1
GEAR TRAIN # 2
Cross Section of
Power
Flow Through Cordless Screw Driver
2.000 How and Why Machines Work
© 1999, 2000, 2001 Martin L. Culpepper
Planetary Gears
Planetary Gear Components
Planetary gear trains consist of the following:
1 Ring gear
1 or more planet gear(s)
1 Sun gear
1 Arm
Legend:
RING
2
GEAR
SUN
PLANET
PLANET
GEAR
GEAR
GEAR
ARM
PLANET
GEAR
2.000 How and Why Machines Work
© 1999, 2000, 2001 Martin L. Culpepper
Planetary Gears
ωωω ωωω ωωω ωωω
ωωω
ωωω
ωωω
ωωω
ωωω
ωωω
ωωω
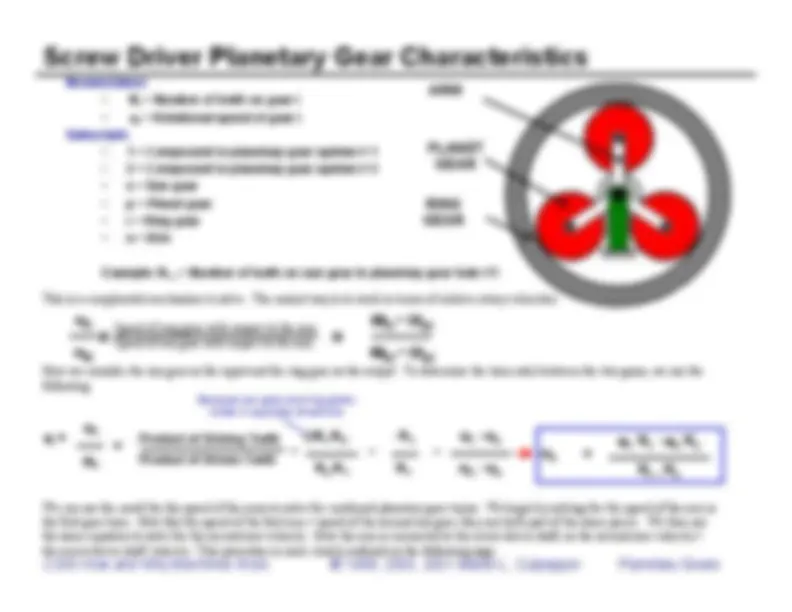
This is a complicated mechanism to solve. The easiest way is to work in terms of relative rotary velocities. Screw Driver Planetary Gear Characteristics
Nomenclature
N i = Number of teeth on gear i
ωωωω i = Rotational speed of gear i
Subscripts
1 = Component in planetary gear system # 1
2 = Component in planetary gear system # 2
s = Sun gear
p = Planet gear
r = Ring gear
a = Arm
Example: N
s (^) = Number of teeth on sun gear in planetary gear train #
PLANET ARM
GEAR
RING
GEAR
ω ri
Speed of ring gear with respect to the arm
ri
ai
ω si
Speed of sun gear with respect to the arm
si
ai
following: Now we consider the sun gear as the input and the ring gear as the output. To determine the train ratio between the two gears, we use the
Because sun gear and ring gears
e i =
ω ri
Product of Dri
rotate in opposite directions
si (^) N
pi
ving Teeth
si
ω ri
ω ai
ω ri
N
ri
ω si (^) N
si
=
ω si
Product of Driven Teeth
N pi (^) N
si
=
N ri
=
ω si (^) -
ω ai
ω ai
N
ri +
N
si
2.000 How and Why Machines Workthe screw driver shaft velocity. This procedure is more clearly outlined on the following page.the same equation to solve for the second arm velocity. Note the arm is connected to the screw driver shaft, so the second arm velocity =the first gear train. Note that the speed of the first arm = speed of the second sun gear (they are both part of the same piece). We then use We can use the result for the speed of the arms to solve for combined planetary gear trains. We begin by solving for the speed of the arm in
© 1999, 2000, 2001 Martin L. Culpepper
Planetary Gears
ωωω
ωωω
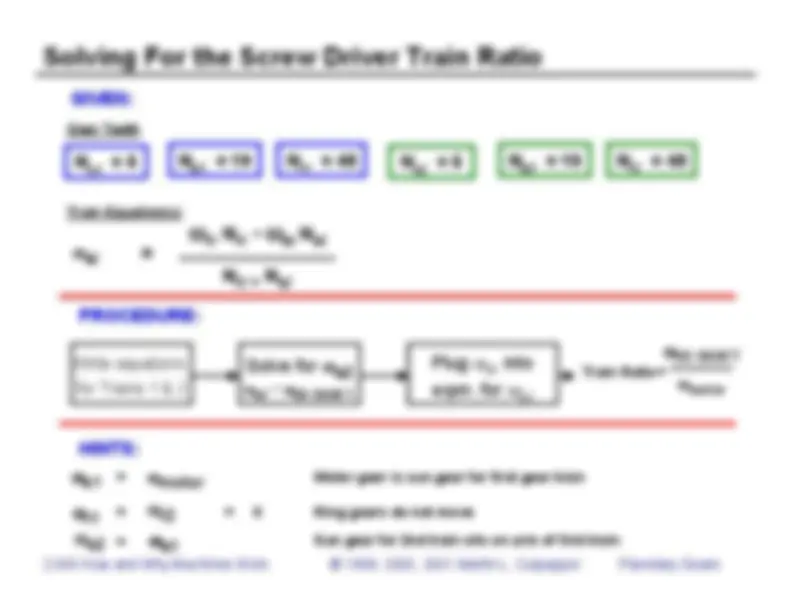
Solving For the Screw Driver Train Ratio
GIVEN:
Gear Teeth
N
s
N
p
N
r
N
s
N
p
N
r
Train Equation(s)
ω
ri
N
ri
ω
si
N
si
ai
N
ri +
N
si
PROCEDURE:
Write equations
for Trains 1 & 2
Solve for
a
ωωωω a
ωωωω SD-SHAFT
Plug
a
into
eqxn. for
a
SD-SHAFT
Train Ratio =
motor
HINTS:
s
motor
Motor gear is sun gear for first gear train
r
r
Ring gears do not move
s
a
Sun gear for 2nd train sits on arm of first train
2.000 How and Why Machines Work
© 1999, 2000, 2001 Martin L. Culpepper
Planetary Gears