

Robótica Industrial
Capítulos 1 e 2
Introdução
Estrutura e Tipologia de Manipuladores
Vítor M. F. Santos
Departamento de Engenharia Mecânica
Universidade de Aveiro, Outubro 2001










Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Apostila de Robótica, capítulos 1 e 2
Tipologia: Notas de estudo
1 / 18

Esta página não é visível na pré-visualização
Não perca as partes importantes!
Introdução Página 1-
1. Introdução
1.1 Origem do termo 'robot'
Em português há o termo alternativo "robô". O termo eslavo Robota significa trabalhos forçados ou escravos, e teve a sua divulgação numa peça de 1921 de Karel Čapek. Numa evolução do mito passando pelo sonho de Čapek (entre outros) até à ficção dos tempos correntes, o conceito de robot ou servo do homem tem ocupado a mentalidade do ser humano. Um exemplo contemporâneo dessa realidade foi dado pelo grande contributo de Isaac Asimov, que chegou a definir as Leis da Robótica por volta de 1950: 1ª Lei: Um robot não pode maltratar um ser humano, ou pela sua passividade deixar que um ser humano seja maltratado. 2ª Lei: Um robot deve obedecer às ordens dadas por um ser humano, excepto se entrarem em conflito com a 1ª lei. 3ª Lei: Um robot deve proteger a sua própria existência desde que essa protecção não entre em conflito com a 1ª ou 2ª lei.
1.2 Algumas definições de Robot e Robótica
Texto da FAQ comp.robotics "Dispositivos electromecânicos pré-programáveis para execução de uma variedade de funções." Dicionário Webster: "Dispositivo automático que executa funções normalmente atribuídas a humanos ou uma máquina com a forma de um humano." ESHED Robotics, 1984 "Um robot é um braço mecânico; um manipulador concebido para levar a cabo muitas tarefas diferentes, e capaz de ser programado sucessivamente. Para levar a cabo as tarefas atribuídas, o robot move componentes, objectos, ferramentas e outros dispositivos especiais por meio de movimentos e pontos pre-programados." Em 1986, P. McKerrow propôs para robot a seguinte definição: "Um robot é uma máquina que pode ser programada para fazer uma variedade de tarefas, do mesmo modo que um computador é um circuito electrónico que pode ser programado para fazer uma variedade de tarefas." McKerrow "Robótica é a disciplina que envolve: a) o projecto, construção, controlo e programação de robots; b) o uso de robots para resolver problemas; c) o estudo dos processos de controlo, sensores e algoritmos usados em humanos, animais e máquinas, e; d) a aplicação destes processos de controlo e destes algoritmos para o projecto de robots." The Robot Institute of America “Um robot é manipulador multi-funcional, programável, projectado para mover materiais, componentes, ferramentas ou dispositivos especiais através de movimentos programáveis variáveis para a execução de uma variedade de tarefas.”
“Manipulating industrial robot: Automatically controlled, reprogrammable multipurpose manipulator programmable in three or more axes, which may be either fixed to place or mobile, of use in industrial automation applications. The robot includes - the manipulator - the control system (hardware and software)” Usualmente o termo Robótica emprega-se para indicar a disciplina associada ao uso e programação
Introdução Página 1-
de robots, e a expressão Engenharia Robótica é mais específico e refere-se à construção de robots e dispositivos robóticos. Nem todos os sistemas automáticos são robots; os sistemas automáticos de funções fixas, como alguns brinquedos com mobilidade ou mesmo uma máquina de Comando Numérico não são consideradas robots. Para ter esse estatuto, deverá o dispositivo ter uma capacidade de programação e, mais ainda, de alguma adaptação ao problema prático. Claramente, um robot pressupõe um sistema que interage fisicamente pelo movimento de certas componentes mecânicas.
1.3 Classificação de robots
1ª- Robots executores ( playback ) - repetem uma sequência de instruções pré-gravada como a pintura ou soldadura. 2ª- Robots controlados por sensores - possuem malhas fechadas de realimentação sensorial. Tomam decisões com base nos sensores. 3ª- Robots controlados por visão - a malha fechada de controlo inclui um sistema de visão (imagem que é processada) 4ª- Robots com controlo adaptativo - o robot pode reprogramar as suas acções com base nos seus sensores. 5ª- Robots com inteligência artificial - usa técnicas de inteligência artificial para tomar as suas decisões e até resolver problemas.
Dispositivos manuais - operados por pessoas Robots de sequências fixas Robots de sequências variáveis - onde o operador pode mudar a sequência com facilidade. Robots executores ( playback ) - onde o operador humano guia o robot a executar uma tarefa fixa. Robots controlados numericamente - o operador fornece apenas o programa do movimento, em vez de o ensinar manualmente Robots inteligentes - percebem e interagem com alterações no ambiente.
Inteligência artificial - instruções de alto nível que serão decompostas pelo sistema em funções de mais baixo nível. Modo de controlo - os movimentos do sistema são modelizados incluindo as interacções dinâmicas entre os diferentes mecanismos. As trajectórias são planeadas à partida, bem como os pontos de contacto com os elementos a trabalhar (manipular). Deste modelo é formulada uma estratégia e os comandos de controlo são enviados para próximo nível mais baixo. Servo-sistema - os actuadores controlam os parâmetros do dispositivo usando os dados sensoriais nas malhas de controlo.
Sistema guiados - O operador indica os movimentos que o robot deve fazer Programação ao nível do robot - O utilizador escreve um programa a especificar as sequências de movimentos que o robot terá de executar. Programação ao nível de tarefa - o programador especifica apenas as acções a tomar sobre os objectos que o robot manipulará.
1.4 Alguns marcos na história da robótica 1801 – J. Jacquard inventou um tear programável 1959 – Primeiro robot comercial introduzido pela Planet Corporation. Era controlado por fins- de-curso e excêntricos 1960 – Primeiro robot “Unimate”. Princípios de controlo numérico e actuadores hidráulicos. No ano seguinte foi instalado na Ford. 1968 – Um robot móvel desenvolvido no Stanford Research Institute: “Shakey”. Câmara de vídeo e sensores de contacto. 1971 – O braço de Stanford desenvolvido pela Universidade de Stanford com actuação eléctrica. 1973 – Primeira linguagem de programação de robots: WAVE seguida em 1974 pela linguagem AL. As duas deram lugar mais tarde ao aparecimento da VAL, linguagem comercial da Unimation 1978 – PUMA introduzido pela Unimation
Esta integração num computador, devido ao abundante número de ferramentas de interface disponíveis, permite mais facilmente especificar os comandos desejados para o controlador, ou até de os gerar de forma automática, como fazem muitos programas (software).
Dispositivos que geram e impõem movimento a uma qualquer parte mecânica pelo desenvolvimento de forças e binários baseada num princípio físico de conversão de energia. Podem ser, por exemplo, motores eléctricos, cilindros hidráulicos, ou pneumáticos, electro-imanes, etc. Têm muitas vezes associados elementos adicionais de transmissão mecânica. Fazem a actuação
Elementos destinados à medição do estado interno do manipulador bem como à percepção do ambiente exterior. Principais tipos de sensores usados num manipulador: codificadores, fins-de-curso, sensores de força, detectores de proximidade capacitivos e indutivos, etc. Fazem a percepção.
Controlador (decide que medida de actuação deve ser imposta)
Unidade de potência (fornece energia ao actuador com base nas ordens do controlador)
Actuador (gera deslocamento linear ou rotacional)
Fonte de energia para os actuadores
Sensor
Comando desejado
Figura 1.2 - Um sistema de controlo tradicional
1.6 O robot e a automação
A automação pode ser de dois tipos fundamentais: rígida e flexível (programada)
Figura 1.3 - Automação rígida
Figura 1.4 - Automação flexível
Rígida – cada componente do sistema tem sempre a mesma função ou conjunto limitado de funções sem possibilidade de alteração de modo simples, obrigando à existência de vários componentes por vezes afins
Flexível - a multiplicidade de componentes da automação rígida é reduzida pelo introdução de um sistema mais versátil: caso dos manipuladores
Introdução Página 1-
As aplicações tradicionais mais importantes são as seguintes: manipulação de materiais, soldadura ( spot welding ), pintura a spray. Há muitos construtores de robots manipuladores no mundo actual: alguns exemplos mais importantes de construtores e marcas são: ABB, KUKA , STAUBLI, ADEPT, PUMA, ...
Pintura a spray (^) Soldadura a arco (^) Acabamento - polimento de superfície
Figura 1.5 - Algumas aplicações industriais de manipuladores
1.7 Importância do robot industrial
O robot industrial vê a sua importância surgir a vários níveis:
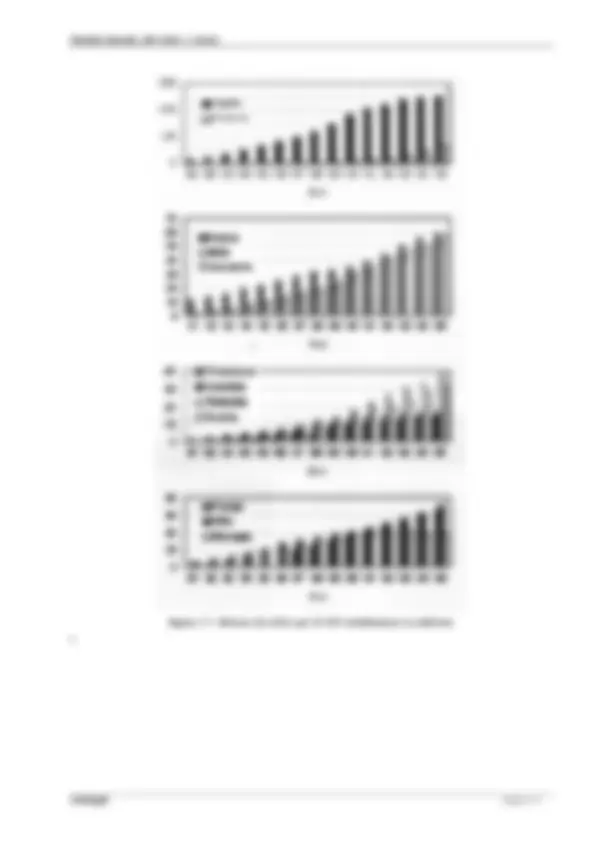
A atestar a importância do robot industrial vêm os números expressos nos gráficos das figuras seguintes que mostram como o parque robótico mundial tem evoluído muito nos últimos 10 anos na indústria (Fonte: Revista Robótica 1999)
Figura 1.6 - Número de robots vendidos por ano e número estimado de robots industriais em serviço.
Introdução Página 1-
Estrutura e Tipologia de Manipuladores Página 2-
2. Estrutura e Tipologia de Manipuladores
2.1 Componentes
O braço mecânico é constituído por juntas e elos ( joints and links ). Os elos são usualmente blocos alongados rígidos, e são ligados uns aos outros através das juntas. Os elos podem variar a sua posição relativa e estão normalmente associados em série. Existem variadíssimas combinações de elos e juntas de acordo com as aplicações, e que mais adiante se descreverão os tipos mais comuns.
Componente ligado à extremidade do braço, isto é, ligado ao último elo do manipulador, e que tem funções adicionais (agarrar ou prender um objecto, ou ainda um dispositivo com funções adicionais mais específicas). A ponta ou end-effector pode ser do tipo garra ( gripper ) ou uma ferramenta ( tool ).
As garras de preensão mecânica (pinça) são bastante comuns e eis de seguida alguns exemplos:
Figura 2.1 - Alguns princípios e tipologias de garras
De notar o tipo de forças/movimentos aplicados e os resultados nas diversas situações. Saliente-se a garra do topo direito que pode servir para agarrar objectos de dimensão variável graças à sua mola. Ou
ainda, a garra na última ilustração, na região inferior direita, cujos dedos (pinças) de deslocam de forma perfeitamente linear. Além das garras do tipo pinça há ainda aquelas de funcionamento baseado em:
Figura 2.2 - Mão (garra) antropomórfica
Nas ferramentas a variedade é muito grande mas as principais incluem as seguintes:
Os componentes que utilizam uma fonte de energia para fazer mover as juntas; são de três tipos essenciais. Eis uma breve comparação dos três tipos de actuadores:
Característica Tipos de actuadores Eléctricos Hidráulicos Pneumáticos Controlo Fácil. Possibilidade de ser elaborado.
Hoje em dia mais facilitado com as electro servo-válvulas
Muito difícil devido a questões de compressibilidade do ar Velocidades Grande Média/Grande Muito grande Binário a baixa velocidade
Precisão (^) uso de transmissãoBoa. Limitada pelo Boa Má, excepto em operações aposições fixas. Funcionamento em situação estática Mau. Requer travões.^
Excelente. Trata-se de funcionamento normal.
Bom. Não há risco de danificação do sistema. Questões ambientais
A presença de arcos eléctricos pode ser indesejável.
Perigo de fugas de óleo.
Sistemas limpos. Risco de poluição sonora de componentes, compressores e das fugas. Custos Relativamente baixos Altos Relativamente baixos Tabela 2-I - Breve comparação dos principais tipos de actuadores Em cada junta há normalmente um actuador. Ao contrário, no corpo humano, há normalmente 2 músculos por cada junta para a moverem em direcções opostas.
Directa - O elemento móvel do actuador é acoplado à junta directamente.
Estrutura e Tipologia de Manipuladores Página 2-
Figura 2.5 - O disco de um codificador óptico relativo e sistema de descodificação relativa (direita)
Figura 2.6 - O disco de um codificador óptico absoluto e sistema de descodificação obsoluta (direita)
O controlador é o componente que determina e, frequentemente, monitoriza o movimento de cada junta. Geralmente o controlador faz outras operações relacionadas com a aplicação. A operação fundamental é a função de controlo em cada junta, isto é, o processo pelo qual se procura que os elos/juntas fiquem posicionados ou tenham o movimento desejado numa dada tarefa a cumprir. Esse processo tem de obviar os problemas de que as acções de um certo actuador não têm os efeitos desejados, ou seja, terá de haver um controlo em malha fechada ou chamado controlo realimentado. Note-se porém que há sistemas (mormente didácticos) onde o controlo é feito em malha aberta. Quer isso dizer que os actuadores são activados e que se espera que cumpram exactamente o previsto. Isso é possível em certa medida com motores passo-a-passo. Se designarmos por m(t) a entrada de um controlador, e à diferença entre a saída desejada para o sistema (actuador) e a sua real saída chamarmos erro e(t) , as funções de controlo mais comuns são as seguintes:
( ) ( )
0 0
2.2 Tipos de juntas
As juntas são essencialmente de dois grandes tipos:
Estrutura e Tipologia de Manipuladores Página 2-
Rotacional (revolute) Prismática (linear) Esférica (3 rotacionais) (spherical orball-and-socket)
Figura 2.7 - Tipos de juntas Na maioria dos manipuladores, as juntas são normalmente divididas em dois grupos:
Graus de liberdade ( degrees-of-freedom - DOF ) é o número total de movimentos independentes que um dispositivo pode efectuar. Um cubo no espaço a 3 dimensões pode deslocar-se ao longo dos três eixos, e também rodar em torno de cada um deles, dando assim um total de 6 graus de liberdade para a sua movimentação. Algo diferente são os graus de mobilidade, associados ao número de juntas existentes. Um exemplo comum desta diferença são os tripés: na verdade em cada pé temos várias juntas prismáticas que afectam o mesmo o mesmo movimento, isto é ao longo daquele eixo em particular. Se em cada pé houver 3 juntas, teremos um tripé com 3 graus de liberdade mas 9 graus de mobilidade. Exemplos de graus de liberdade necessários para certas tarefas:
Para mudar esta peça e rodá- la são necessários 4 graus de liberdade apenas. (nota: o manipulador ilustrado poderá não ter a possibilidade de o fazer, para certas orientações)
Para colocar esta peça no encaixe (que pode ter uma orientação arbitrária) são necessário 6 graus de liberdade: 3 para as posições xyz e 3 para as 3 orientações do encaixe. (o manipulador ilustrado não o permite) Figura 2.8 - Graus de liberdade necessários para dois exemplos de movimento
Estrutura e Tipologia de Manipuladores Página 2-
Figura 2.11 - Manipulador cartesiano (PPP)
Volume do espaço de trabalho: V =π A 1 (^) [( L + A 2 )^2 − L^2 ] Figura 2.12 - Manipulador Cilíndrico (ou RPP)
Volume do espaço de trabalho: [( )^33 ]
V =^4 π L + A − L
Figura 2.13 - Manipulador Esférico (RRP) Estrutura e Tipologia de Manipuladores Página 2-
( ) ( ) ( )
2 2 1 2 1 2 1 2 1 2 1
2 2
Figura 2.14 - Manipulador Articulado Horizontal–SCARA (RRP)
Volume do espaço de trabalho:
( ) ( ) ( )
3 3 1 2 1 2 1 3 1 2 1 2
2
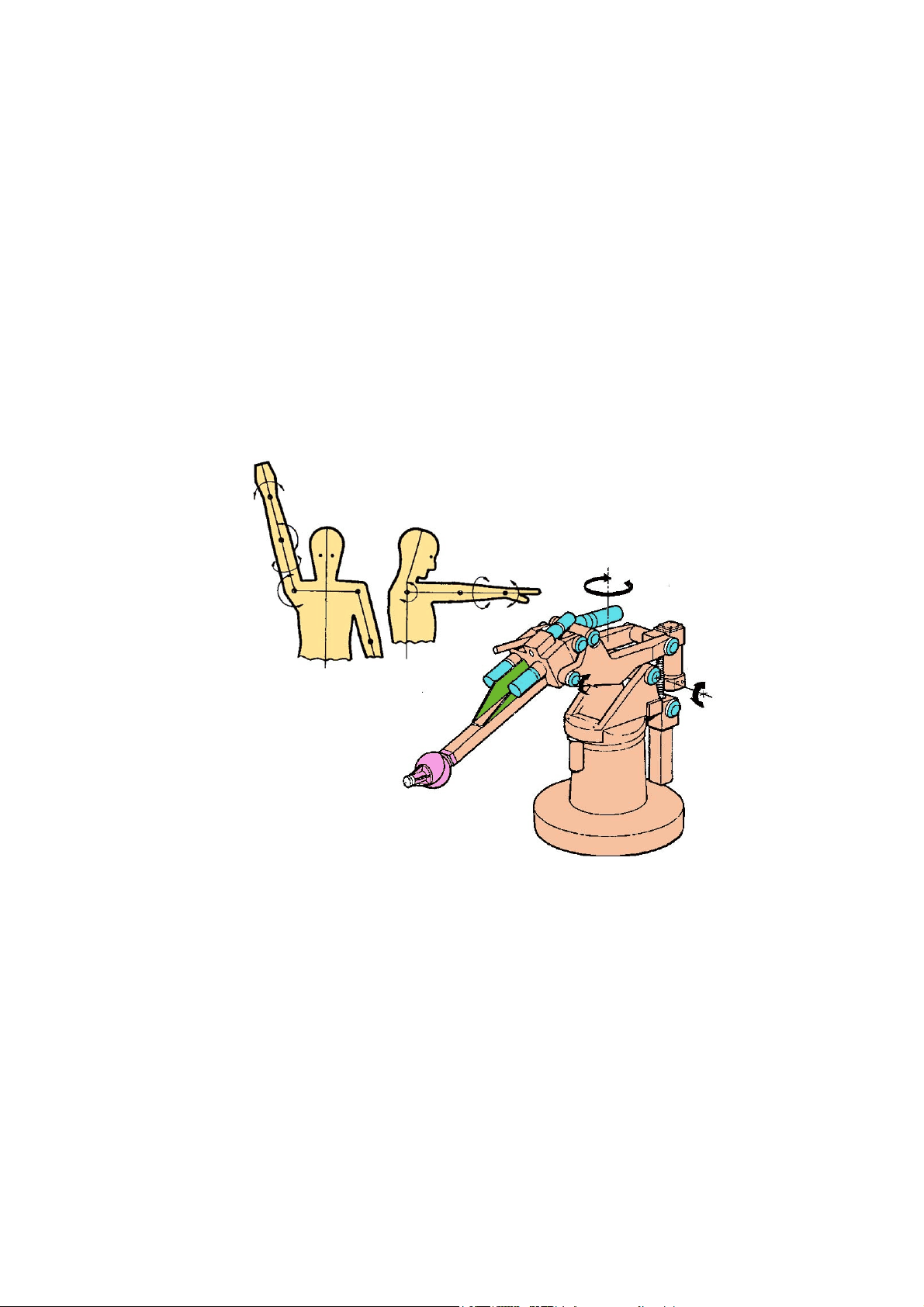
Figura 2.15 - Manipulador Articulado vertical (ou antropomórfico) (RRR)
Podemos comparar os volumes de trabalho admitindo que as juntas rotacionais varrem 360º e que as prismáticas são todas iguais de comprimento L e que se deslocam o comprimento A e que A=L. Resulta assim a seguinte tabela
Cilíndrico V =^3 π^ L^3
V =^28 π L Articulado Horizontal V =^4 π^ L^3 Articulado Vertical 3
(^32) π L
Note-se que o volume de trabalho aumenta com o número de juntas rotacionais.
Estrutura e Tipologia de Manipuladores Página 2-