












































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Revista Saber Eletronica 471
Tipologia: Notas de estudo
1 / 52

Esta página não é visível na pré-visualização
Não perca as partes importantes!
4 I SABER ELETRÔNICA 464 I Setembro/Outubro 2012
14
03 06 Saber Educacional .................................... 05 Metering Smar t Grids .............................… 09 Ta t o........................................................ 1 1 Patola ....................................................... 11 G l o b t e k............................................. 1 7 E S C.................................................... 1 9 C i k a..................................................... 2 5 Nova Sabe r .............................................. 45 Mouser ...................................................... 2ª Capa Nova Saber .............................................. 3ª Capa National ...................................................... 4ª Capa Índice de anunciantes 06 Carro Elétrico de 544 CV, da Mitsubishi Motors, Encara a Tradicional Corrida de Pikes Peak 06 Manômetros de Referência de Pressão, da Fluke Calibration 07 Protek Devices Lança sua Primeira Família de Fusíveis “chips” Eletrônicos para Sobrecorrente 07 Integrated Biometrics Apresenta: Sherlock, o Menor, Mais Leve e Fino Sensor Appendix F Mobile ID 08 Amper Prepara a Entrega de um Novo Equipamento 08 Laser de Alta Precisão, Sem Contato 08 Roteadores TP-LINK Promovem Liberdade e Qualidade de Conexão para Usuários de Internet 09 Sandisk Apresenta o Cartão MICROSDXC de 64 GB Mais Rápido do Mundo
10 Redes de Comunicação Usadas nas Aplicações de Controle de Movimento 14 Soldando CIs em Invólucros QFN
20 Aplicando o MOSFET de forma a reduzir Indutâncias e Capacitâncias Parasitas em Dispositivos Eletrônicos 26 Visual Studio, Windows 8 e a Linguagem C# na Eletrônica
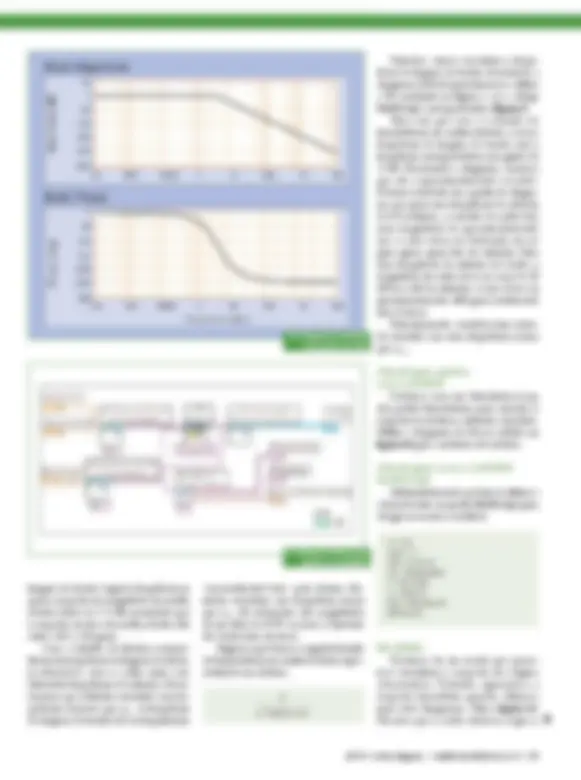
32 Projete um Robô com o LabVIEW 34 Aprenda como Projetar um Sistema de Controle: Resposta em Frequência para Sistemas de Controle – Parte 4
46 Controladores Step-Down Duplos com Entrada de Referência Externa alcançam uma Precisão de Regulação de 0,3%
2013 I Julho/Agosto I SABER ELETRÔNICA 471 I 7 Produtos A Integrated Biometrics, LLC (IB) anunciou outro ineditismo tecnológico com a certificação pelo FBI, dos Estados Unidos, da sua novíssima tecnologia para impressões digitais. A equipe de desenvolvimento da IB criou o novo produto usando a tecnologia paten- teada da empresa, Light Emitting Sensor (LES), juntamente com um transistor de película fina (TFT). A tecnologia LES utiliza uma película de polímero altamente elaborada, interagindo com propriedades espe- cíficas da pele humana para imagens luminescentes de impressões digitais.A TFT captura a imagem no padrão 500 PPI, exigido pelo FBI. A combinação da tecnologia LES e do transistor de película fina (TFT) permite reduções de peso e imagem de até 95%, quando comparada a outros produtos servindo ao mesmo propósito. A IB fornece sensores de impressão digital customizados para mercados que exigem soluções biométricas Appendix
F ou PIV071006 e, diferentemente de outras tecnologias biométricas de impressão digital usadas com frequência, ela é capaz de alcançar a mais alta qua- lidade de imagens sem comprometer a espessura e o tamanho total do aparelho. Esta capabilidade única produziu o pri- meiro sensor do mundo com base em TFT a alcançar a certificação de identi- dade móvel Appendix F Mobile ID, do FBI. As tecnologias estão sendo usadas para produzir os mais finos, menores e leves sensores biométricos Appendix F Mobile ID. A Protek Devices apresentou uma família de fusíveis chips eletrônicos para sobrecorrente que se soma à extensa disponibilidade de linhas de produtos de sobretensão da empresa. Agora, a companhia pode fornecer às fabricantes de design de eletrônicos (EDM) uma única fonte de soluções avançadas e de baixo custo de prote- ção de circuitos. Os novos fusíveis de sobrecorrente cobrem uma infinidade de aplicações, tais como telecomuni- cações, informática, eletroeletrônicos e muito mais. Os novos fusíveis de sobrecorrente em dispositivo de montagem em superfície (SMD) consistem de uma variedade de tipos e tamanhos. Os números de peça para o pacote 0603 são PF0603F, PF0603S e PF0603H. O PF0603F é um Protek Devices lança sua primeira família de fusíveis “chips” eletrônicos para sobrecorrente fusível de ação rápida. O PF0603S é um fusível de ação lenta. E o PF0603H é um fusível de alto inrush. O pacote 0603 é ideal para TVs LCD, câmera digital, DVD e Blu-ray players, câmeras de vídeo e videogames. Tam- bém é ideal para power-over-Ethernet, discos rígidos e outros dispositivos de consumo. Os números de peça 1206 são PF1206F, PF1206S e PF1206H. O PF1206F é um fusível de ação rápida. O PF1206S é um fusível de ação lenta. E o PF1206H é um fusível de alto inrush. O pacote 1206 é ideal para smartphones, DVD e Blu-ray players, consoles de jogos e reprodu- tores de música digital. Ele também é ideal para dispositivos GPS, sistemas de áudio, fontes chaveadas e carregadores e scanners. Além disso, o pacote 1206 é adequado para equipamentos de infraestrutura de telecomunicações e modems DSL/de cabo. "Há décadas, lideramos o fornecimento de soluções avançadas e de custo-be- nefício em proteção de circuitos de so- bretensão e os nossos clientes também têm nos perguntado sobre as soluções de proteção de sobrecorrente", disse Rocky Kansal, presidente da Protek Devices. "Atendemos agora os pedidos de nossos clientes com estes fusíveis de ação rápida, queima lenta ( slow blow ) e alto inrush. Então, estamos oferecendo agora uma única fonte para as EDMs adquirirem todos os seus componentes de proteção de circuitos de sobreten- são e sobrecorrente. Continuaremos também expandindo e inovando essa linha de fusíveis chips."
8 I SABER ELETRÔNICA 471 I Julho/Agosto I 2013 A Amper Programas recebeu pedido da empresa francesaThales Communications & Security para fabricação de 500 unida- des para o Exército Francês do seu novo produtoW@tcher, destinado ao mercado internacional. O W@tcher é um equipamento portátil de características militares, que permite o controle remoto das rádios táticas VHF e HF sem fio, via bluetooth. Com a sua tela tátil, que fica posicionada no antebraço como se fosse um relógio, oferece um controle de todos os parâmetros de configuração das rádios, além de outros serviços como SMS ou FFI (identificação de pessoas confiáveis ou inimigas). Por meio dele, os chefes das unidades po- derão se conectar de modo autônomo, tanto com a rádio do veículo quanto com um rádio transportado por um soldado de sua equipe, com bluetooth. O acesso é realizado de modo fácil graças a sua interface gráfica simplificada e intuitiva. Amper prepara a entrega de um novo equipamento Uma das características mais importantes deste novo dispositivo é permitir maior autonomia e liberdade de movimento aos soldados, que podem acessar as principais funcionalidades do rádio por meio de um equipamento leve e compacto, desenhado para trabalhar em condições severas. Desse modo, foi possível responder uma antiga demanda dos exércitos que, até hoje, tinha sido difícil atender no que diz respeito à ergonomia para gerenciamento das comunicações num entorno tático. O W@tcher foi elaborado pela Amper Programas seguindo especificações conjuntas da Thales, o que vai permitir adicionar futuros aplicativos direcionados à melhoria do combatente. O início da operação deste novo equipa- mento permite à Amper seguir mantendo a sua liderança na Espanha no âmbito das radiocomunicações militares, área que nos últimos anos tem se tornado um dos pilares da Divisão de Defesa do Grupo. Um laser sem contato para medição rápida, de alto desempenho, foi lançado pela AMETEK Solartron Metrology. A nova unidade de triangulação a laser Orbit® LTH oferece leituras de 0,02 F.S. ( Full Scale ) em intervalos de medição de 2 ou 10 mm, produzindo uma precisão de até 0,05 μm com o passo de 2 mm. O laser pode ser conectado em rede com até 150 sensores diferentes com o sistema de medição digital Solartron Orbit 3. Entre as aplicações destacam-se a medi- ção em alto volume para o controle da qualidade de produtos metálicos e plás- ticos que poderiam ser danificados por instrumentos de medição com contato. Os circuitos de controle automático de ganho do sensor ajustam a potência de acordo com o retorno do material, ofe- recendo leituras melhores em superfícies diferentes. Há várias saídas disponíveis, como USB, Ethernet, TCP, RS232 e Modbus. Laser de alta precisão, sem contato Produtos Devido à evolução tecnológica dos últimos anos, cresce o número de dispositivos que podem acessar a internet, bem como a qualidade de conteúdos audiovisuais e interação social para compartilhamento de informações. Os consumidores fazem uso simultâneo de smartphones, tablets e notebooks, além de terem nas residências televisores do tipo “smart” e até mesmo geladeiras conectadas. Assim, nada melhor que estes aparelhos estejam interligados em um único dispositivo inteligente: os roteadores de acesso à internet para uso doméstico (ou corporativo). Quem dá as dicas sobre o melhor produto a ser utilizado é o cliente, conforme a necessidade de solução para conectar computadores, dispo- sitivos portáteis e eletroeletrônicos que têm conexão à internet. Caso a
dificuldade seja montar uma rede sem fio com grande alcance, a TP-LINK oferece tecnologias que permitem a interconexão de diferentes roteado- res para que se comuniquem entre si, sem precisar de fios. Trata-se do sistema de distribuição de sinal WDS, no qual a TP-LINK foi a primeira a oferecer esta tecnologia no mercado brasileiro. Mas, se a demanda é por velocidade e facilidade de acesso para compartilhamento de conte- údos, acesso a redes sociais, jogos online ou filmes em alta definição, as soluções Gigabit Ethernet oferecem desempenho de até 1Gbps, que per- mitem que tudo isso seja executado simultaneamente sem “gargalos” ou travamentos. Potentes e cheios de tecnologia, os roteadores da TP-LINK tem design agradável e moderno, oferecem suporte à segurança na transmissão de dados com o recurso de Confi- guração de Segurança Rápida ( Quick Security Setup ), que estabelece auto- maticamente uma conexão segura ao clique de um botão, o que permite manter a privacidade dos usuários e da rede protegidas. Outra vantagem é o longo alcance, para desfrutar do sinal em qualquer lugar.
10 I SABER ELETRÔNICA 471 I Julho/Agosto I 2013
O Controle de movimento é essencial para os sistemas mecatrônicos. Para otimizar os sistemas mecânicos, os fabricantes de máquinas muitas vezes substituem peças mecânicas com soluções eletrônicas. Um exemplo é a eliminação dos eixos rígidos para executar operações de camming. Estes eixos são substituídos por uma combinação de drives e motores que dependem de um software de controle para fornecer funcionalidade ao camming. Tais sistemas e dispositivos são mecanica- mente mais flexíveis, mais fáceis de manter e menores. No entanto, estas máquinas também contêm mais componentes ele- trônicos que requerem um controle com- plexo e determinístico e de comunicação confiável.Veja as figuras 1 e 2. Em um sistema típico, o controlador de movimento tem a maior parte da carga de maior complexidade do sistema. Ao manipular a sincronização de múltiplos eixos, esses controladores oferecem engrenagens e funcionalidades camming, Redes de comunicação usadas nas aplicações de Controle de Movimento A concorrência global está pressionando os fabricantes de dispositivos ou máquinas a fornecerem equipamentos com alto rendi- mento e custos operacionais reduzidos. Os crescentes custos de energia e a consciência ambiental estão levando os engenheiros a desenvolverem projetos com um menor con- sumo de energia. Devido a isso, fabricantes de equipamentos têm mudado a concepção de máquinas simples para soluções com múltiplas finalidades através da adoção de modernos sistemas de controle, algoritmos sofisticados, integração eletrônica high-end e tecnologias de comunicação com estruturas mecânicas. Guilherme Kenji Yamamoto Renan Airosa Machado de Azevedo National Instruments bem como todas as características de segurança adicionais, tais como limites de switches , habilitação de driver e parada de emergência.Além disso, o controlador de movimento ainda precisa fornecer as fun- ções tradicionais e executar os algoritmos de controle para máximo desempenho e eficiência.
Tradicionalmente, as aplicações de controle de movimento utilizam um con- trolador de movimento dedicado e um con- trolador separado para controlar sistemas mais complexos. O aumento de desempe- nho dos controladores de automação de hoje, como controladores programáveis para automação ou controladores lógicos programáveis, está alimentando a tendência de integrar a funcionalidade do controlador de movimento diretamente ao controlador de automação e executá-lo como uma ta- refa de alta prioridade entre outras tarefas de automação. F1. Sistema tradicional, com componentes mecânicos.
2013 I Julho/Agosto I SABER ELETRÔNICA 471 I 11
Desde o início de 1980, sistemas de automação têm sido baseados em barra- mentos digitais para realizar tarefas como transferência de dados de processo e de comunicação industrial. Comparados com o barramento analógico, eles são mais confiáveis e robustos, especialmente para a comunicação através de longas distâncias. Além disso, as redes digitais simplificam a fiação, pois permitem conectar vários elementos em série ao invés de ligar cada elemento individualmente. Isso resulta em um cabeamento significativamente mais barato e mais fácil de manter nos sistemas. Devido aos requisitos de desem- penho, por muitos anos a indústria de movimento teve uma abordagem diferente e se conectou a drivers via barramento analógico, ou barramento de movimento específico. Este esquema de comunicação adicional aumentou a complexidade do sistema global. Com o driver digital de alta performance e com o barramento digital, agora, é possível simplificar a arquitetura do sistema usan- do o mesmo barramento para controle de movimento e controle de dados do processo e, ao mesmo tempo, obter me- lhoria significativa de desempenho com as vantagens do barramento digital como EtherCAT, CANopen, Profibus, Ethernet POWERLINK, ou SERCOS. Especialmente em aplicações que executam controle distribuído de movi- mento com multieixos, os barramentos digitais oferecem uma série de vantagens. Eles proporcionam maior flexibilidade e permitem o desenvolvimento de sistemas distribuídos com poder de processamento e tomada de decisão até o nível dos dri- vers. Com as normas comuns, os clientes podem facilmente combinar sistemas de diferentes fornecedores e escolher a melhor solução para as suas tarefas individuais. Ao usar drives digitais que se co- municam por barramento digital, for- necedores e fabricantes são capazes de F2. Sistemas atuais com vários eixos sincronizados.
2013 I Julho/Agosto I SABER ELETRÔNICA 471 I 13
seguida, atualiza e realinha os clocks em todos os outros dispositivos slaves. Sincronização precisa é particular- mente importante nos casos em que os processos amplamente distribuí- dos exigem ações simultâneas, como no movimento coordenado entre os eixos de movimento. A NI utiliza time stamps para medir a diferença de tempo entre a saída e o retorno. Desta forma, o atraso de propagação é calculado entre os nós, e uma precisa sincronização (menos de 1 μs) pode ser alcançada pelo ajuste exato dos clocks distribuídos. Devido ao desempenho de alta velocidade e ao timing reduzido para recursos de sincronização, o EtherCAT é uma solução ideal para aplicações distribuídas em rede ou controle de movimento, onde um poderoso con- trolador atua em tempo real, como o master EtherCAT e executa o apli- cativo de controle de movimento de comunicação externa, distribuído nas unidades slaves pelo EtherCAT.
Os servo-drivers EtherCAT da NI combinam performance com flexibi- lidade, escalabilidade e potência para F4. Configuração Gráfica de Eixos através de projetos com LabVIEW. E atender os requisitos de desempenho exclusivo de quase todas as aplicações a partir de torques básicos e aplicações para controle de velocidade de movi- mento de multieixos, usando progra- mação gráfica com o NI LabVIEW e o Módulo NI LabVIEW SoftMotion. Os cabos Ethernet-padrão simplifi- cam significativamente o cabeamento e a capacidade de encadear até 128 eixos. Um controlador de alto desempenho em tempo real permite a configuração de um sistema distribuído de controle de movimento dentro de minutos. Usando o projeto do LabVIEW para configurar e validar o sistema de controle de mo- vimento simplifica-se a configuração e a programação gráfica. Com as funções de alto nível de movimento ou a proprieda- de de chamar nós API, os clientes podem implementar aplicações de movimento personalizadas através da facilidade de uso da programação gráfica. Atente para a figura 4. Os controladores de tempo real da NI, servoacionamentos AKD Ether- CAT, NI LabVIEW e o NI LabVIEW Sof- tMotion Module EtherCAT tornaram a tecnologia acessível para que clientes possam implementar aplicações dis- tribuídas em rede ou para controle de movimento.
14 I SABER ELETRÔNICA 471 I Julho/Agosto I 2013
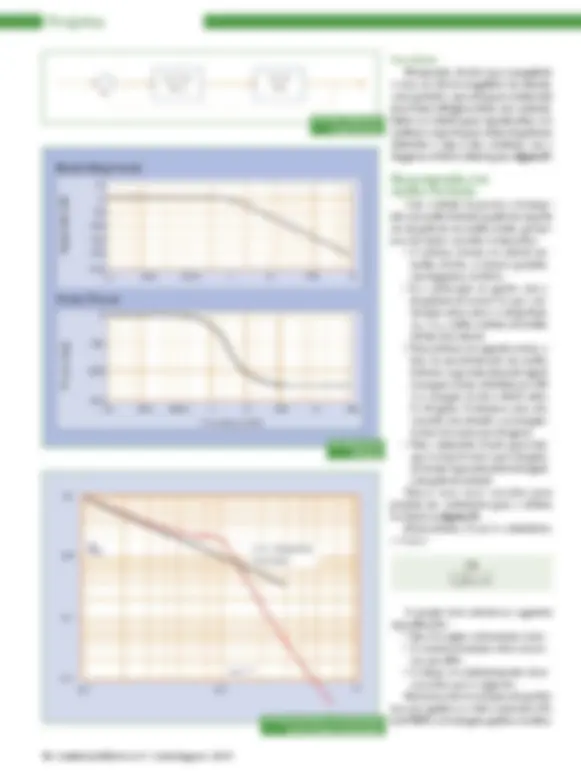
título acima está parcialmente cor- reto. O termo certo é retrabalhan- do, que vem do inglês rework. Como rework você pode encontrar muita informação boa em sites de língua inglesa, facilmente. Mas o retrabalho, no Brasil, ain- da é uma palavra pouco utilizada, e escrevi “soldando” por ser mais comum e simples. Este artigo vem complementar uma série de três que fiz, nas edições nos^ 443, 444 e 445, que ainda, surpreendentemente, são muito atuais e com bom conteúdo para quem deseja se aprimorar em retrabalho desde o seu início. Já naquela época esses artigos eram inovadores e, por incrível que pareça, foram baseados em treinamentos que fiz na LG Amazônia em Taubaté, oito anos antes! Isso demonstra algumas coisas, a pri- meira é que a Revista Saber Eletrônica está publicando artigos de nível bom a ótimo, e em consonância com as necessidades das indústrias, mercado de trabalho e escolas técnicas, e com uma visão e estratégia de futuro muito boas. Já pensou uma empresa de tecnologia saber oito anos antes sobre o futuro? O mais incrível é que as indústrias, escolas técnicas, fabricantes e distribuidores de ferramentas para retrabalho em SMD ainda não se deram conta disso! Ou muitos pontos desta linha se unem, ou não haverá profissionais qualificados a tempo para aten- der as necessidades das indústrias! Mas, tratemos agora da parte mais prática do Retrabalho em Componentes com Invólucro QFN. Começando pelo que é óbvio, vamos abrir a caixa preta dos QFN pela descrição de sua sigla. Aliás, QFN ainda por cima não é uma sigla “completa”, digamos assim. É a abreviatura de uma sigla e, para complicar mais um pouco, não é uma sigla exclusiva de um tipo de invólucro, mas de toda uma família de invólucros que está dispersa e continuamente evoluindo nas indústrias fabricantes de chips. O significado completo da sigla é Quad Flat No-Lead – (QFN) , ou seja, é uma família de invólucros de circuitos integrados ou de módulos, do tipo plano, com conexões em seus quatro lados, mas sem terminais. Pode (ou não) possuir um dissipador com plano- -terra sob o chip. Nas figura 1 mostramos alguns invólucros desta família. Há ainda uma pequena variação mecâni- ca nos invólucros QFN, que são os μDFN. A definição de sua sigla é Micro Dual Flat No-Lead , ou seja, é muito semelhante à filo- sofia de invólucro com a família QFN, mas
Luís Fernando F. Bernabe Este artigo complementa o curso rápido Retrabalho (rework) em Componentes SMD, anteriormente publicado nas revistas Saber Eletrônica 443, 444 e 445. F2. A família dos invólucros μDFN. F1. A família dos invólucros QFN. Para você que gostaria de saber mais sobre o tema, acesse:
16 I SABER ELETRÔNICA 471 I Julho/Agosto I 2013 quanto o seu layout. Isso para termos uma ideia do espaço disponível para introduzir- mos o ferro de solda e termos uma boa sensibilidade da inclinação necessária em função do tipo de ponta de ferro de solda que estamos utilizando, da geometria do chip e do espaço disponível para a trans- ferência de calor suficiente para que seja derretida a solda. A recomendação de layout mais de- talhada que encontrei está apresentada parcialmente na figura 9. Traduzindo e interpretando os itens da tabela 1 temos as palavras: versão ( version ), número de pinos ( number of pins ), espaçamento entre terminais ( pitch ), comprimento dos terminais de soldagem ( Lead Pad Length ), largura dos terminais de solda ( Lead Pad Width ), largura do terminal de dissipador ( Thermal Pad Witdh ), compri- mento do terminal de dissipador ( Termal Pad Length ), comprimento máximo do terminal do CI ( Maximum Component Lead Length ) e largura máxima do terminal do CI ( Maximum Component Lead Width ). Com estas informações podemos dizer que: temos um espaço disponível de pad para fora do CI de 0,17 mm (comprimento máximo do terminal do CI - comprimento dos terminais de soldagem: 0,92 - 0,75). Esta medida de 0,17 é em toda a volta do CI, considerando-se ainda que esteja muito bem posicionado! Por causa disto tem tanto profissional que não gosta de SMD, é um trabalho muito preciso e delicado que exige muita concentração. Esta informação pode ser vista melhor na figura 10.
É muito mais fácil e rápido dessoldar CI em QFN com o auxílio de um pré- -aquecedor ( pre-heater ). Este pré-aque- cedor pode ser feito por você mesmo, inclusive. Quem sabe, se escreveremos um artigo sobre isso? O importante é que para a soldagem de SMDs, como por exemplo estes CIs, o ideal é obedecer uma curva específica de evolução da temperatura em função do tempo, com a finalidade de aumentar sua vida útil e da placa ( figura 11 ). Lembre- -se que não sabemos ainda se o chip está funcional ou não, somente vamos saber disso quando o substituirmos por um novo ou ressoldarmos o antigo. São duas estratégias de solução de problemas. Uma focada no mau contato de solda, e a segunda no chip. A pergunta agora é: como vamos fazer esta curva de temperatura x tempo “na mão”, com um soprador de temperatura controlada e um pré-aquecedor? Ou até mesmo sem o pré-aquecedor? Como é mais comum, a reposta vem de conhecermos melhor nosso equipamento.
Há muitos tipos de sopradores tér- micos no mercado. Para você conhecer melhor o SEU soprador, sugiro que faça um ensaio interessante. Para este ensaio você vai precisar de um termômetro com termopar, PT100 ou semelhante, um pedaço de madeira com marcação de 10 em 10 mm e o seu soprador. Ligue o soprador, ajuste sua temperatura para o início de sua escala, caso não esteja marcada em °C, depois de alguns segundos que a temperatura se estabilizou, monte uma tabela com esta posição, a distância do soprador ao sensor de temperatura e a temperatura que foi me- dida. O soprador que tenho em mãos é um simples de marca muito boa, este modelo não possui escala em °C. A escala é de 1; 1,5; 2; 2,5; até 6.Veja a tabela 2. Em primeiro lugar anote a graduação da escala em que foi ajustada e, com o sensor de temperatura, meça a temperatura do jato de ar quente considerando as distâncias aproximadas. Por exemplo, no primeiro traço principal da escala, depois de estabilizado o aquecimento, meça a temperatura a uma dis- tância de 40 mm, anote a medida, posicione o sensor a 30 mm e meça a temperatura novamente, anote a medida, e repita o pro- cesso por quatro ou cinco pontos na escala do potenciômetro do soprador. Feito isso, procure um ponto de ajuste de temperatura na escala do seu soprador no qual apenas variando a distância do bico até o sensor você consiga reproduzir a curva de aquecimento ideal de retrabalho, sem mexer no controle de potência, variando somente a distância. Caso haja vários componentes sensíveis ao calor na região de retrabalho do QFN, é necessário protegê-la com fita adesiva de Kapton (amarela). Coloque pedaços pequenos de fita no entorno do CI QFN, protegendo esta região, principalmente do fluxo de ar quente. Estas fitas também atuam como “espelhos”, refletindo o infra- vermelho do ar quente. Agora, ligue o pré-aquecedor sob a área do componente QFN numa temperatura que pode variar de 100 a 120 °C depen- dendo do tamanho das trilhas e das áreas de dissipação de calor na placa. Aguarde alguns segundos para a estabilização da temperatura. Aproxime lentamente o bico do sopra- dor observando uma distância de 50 a 60 mm, aguarde 10 a 15 segundos, aproxime o bico do soprador tendo sempre como referências a curva de aquecimento do chip e a tabela de aquecimento do soprador. Com a pinça na mão, lentamente apoie sua ponta na lateral do chip e veja se ele está solto, “flutuando” na solda. Dê um super leve toque no chip e veja se isso ocorre. Se e somente se, o chip estiver nestas condições, remova-o com muita calma pegando-o com a pinça pelo seu lado superior. Caso contrá- rio, se o chip ainda está com a solda pouco aquecida, aproxime novamente o bico do soprador, cuidado, siga sempre a tabela e o gráfico! Remova o chip quando for possível. Como não sabemos com certeza se o chip está com problemas ou se é a qualidade da solda, coloque-o sobre a caixa metálica do soprador o mais rápido possível. Partindo da ideia que o chip em QFN está queimado, vamos para a próxima etapa: a sua substituição.
Para soldarmos o mesmo CI vamos começar pela limpeza da PCI. Aplique um pouco de fluxo. Use um pedaço de malha de 1 ou 1,5 mm de largura, então posicione a malha sobre a solda a ser removida e encoste a ponta do ferro sobre ela. Muito cuidado, faça isso sem pressionar a ponta do ferro contra a malha, arranhando o PAD de solda. Dependendo da força aplicada com o calor, o PAD se solta facilmente da placa.Terminada a limpeza da placa, vamos estanhar o chip. Um chip novo em QFN normalmente não possui solda suficiente para a sua solda- gem, isso ocorre com os BGAs. Então quem utiliza no ferro de solda uma ponta-faca, leva vantagem agora, pois este preenchimento de terminais com a solda é muito facilitado. Ajuste sua estação de solda para uma tem- peratura um pouco acima da temperatura
2013 I Julho/Agosto I SABER ELETRÔNICA 471 I 17 4 x 4 9 x 9 Version E S E S Number of pins 16 16 64 64 A – Pitch (mm) 0.65 0.65 0.5 0. B – Lead pad length (mm) 0.92 0.92 0.69 0. C – Lead pad width (mm) 0.37 0.37 0.28 0. D1 – Thermal pad width (mm) 2.0 2.0 7.1 7. D2 – Thermal pad length (mm) 2.0 2.0 7.1 7. Maximum component lead length (mm) 0.75 0.75 0.5 0. Maximum component lead width (mm) 0.37 0.37 0.3 0. de fusão da solda, normalmente se você es- tiver soldando com solda de baixo ponto de fusão esta temperatura é em torno de 180 °C e o ajuste fica em até 220 °C, na ponta isolada, com a temperatura estabilizada. Siga este procedimento com o pré- -aquecedor desligado.Vire o chip em QFN de terminais para cima, aplique um pouco de fluxo, estanhe a ponta-faca da estação de solda e enquanto isso aplique a solda derretida nos terminais do CI. SEM fazer força alguma! Tão pouca força que não precisa nem segurar o chip, o atrito dele com a manta antiestática é suficiente para espalhar a solda passando-a derretida sobre os terminais. Com a geometria e a tensão superficial criada pela ponta em faca, não é necessária uma dosagem de solda, pois há uma “divisão” da solda derretida entre os terminais do chip e a ponta desde que você não exceda na quantidade. Como nem todo mundo tem uma ponta- -faca na estação de solda, faça a aplicação de solda derretendo-a de pouco em pouco só F7. Vista inferior de um CI em QFN 16. Observe que as medidas estão em mm. F8. Comparação de tamanho do CI em QFN. T1. Medidas com seus valores em mm.
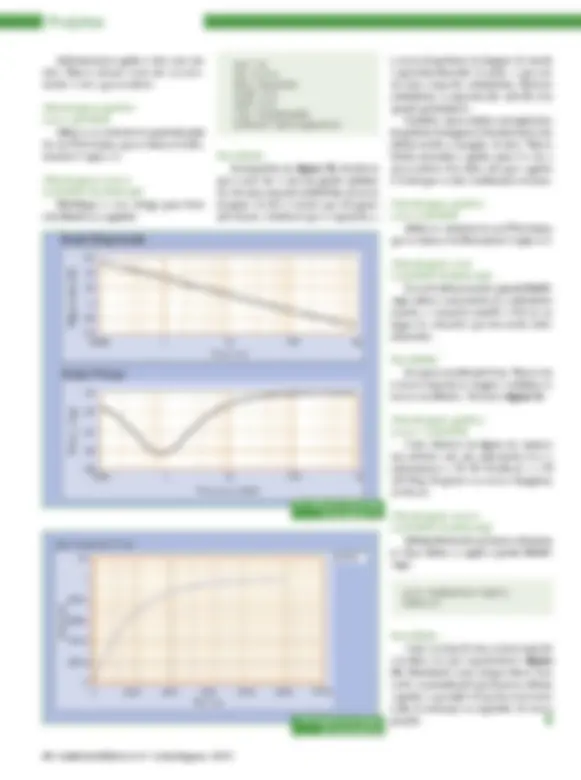
20 I SABER ELETRÔNICA 471 I Julho/Agosto I 2013 Desenvolvimento H oje em dia, em uma única pastilha de silício – Si pode-se inserir mi- lhões de circuitos, melhorando a mobilidade e processamento das Inovações Tecnológicas existentes. Estas pastilhas são comumente chamadas de Circuitos Integrados - CI. Analisando-se os dispositivos eletrônicos atuais, é difí- cil encontrar algum que não faça uso de algum CI. Como por exemplo, o micro- processador utilizado em Computadores, Notebooks, Ultrabooks e Smartphones é indispensável a estes equipamentos. O MOSFET – transistor de efeito de campo de metal-óxido-semicondutor – é atualmente um dos dispositivos mais importantes no desenvolvimento de circuitos integrados, pois cada CI pode possuir milhões de transistores. Segun- do Boylestad e Nashelsky (1996), seu tamanho e estabilidade térmica, entre outras características, o tornam ideal para confecção em larga escala, sendo muito utilizado em projetos de computadores e outros aparatos eletrônicos. Contudo, seu manuseio requer conhecimentos de suas características em chaveamentos de alta frequência, diversas polarizações e no comportamento ante os vários níveis de campo elétrico. Assim, seu uso sem as devidas precauções e conhecimento de seu comportamento em situações diversas pode ocasionar fenômenos parasitas que prejudicam seriamente o processamento de seu circuito lógico. E entre estes fenô- menos estão a Indutância e Capacitância Parasitas, que ocasionam atrasos de propagação ( delays ) e repiques (também conhecido como debounce ). Os delays são o que motivam a troca de computadores e notebooks todos os anos. Já os repiques, que causam comutações indesejadas no período de processamento, são incômodos em chaveamentos que re- querem precisão. Assim, exemplificando: em um placar eletrônico onde uma comuta- ção implica, por exemplo, numa mudança de 0 para 1, seria muito indesejada uma mudança de 0 a 6 (ou 0 a 5). Outros efeitos indesejáveis devido aos repiques também devem ser minimizados em chaveamen- tos que requerem precisão, tais como em equipamentos médicos e fisioterapêuticos. Então, diante da demanda de solu- ções para fenômenos envolvendo o uso de MOSFET e aumento de frequência de processamento cada vez maior em circui- tos lógicos digitais, buscou-se minimizar e entender a Indutância e Capacitância Parasitas em chaveamentos com MOSFET, propondo uma solução viável ao pro- blema a partir da análise dos resultados obtidos e discutindo sua viabilidade.
Segundo Boylestad e Nashelsky (1996), o surgimento do MOSFET culmi- nou em um grande avanço tecnológico por ser fácil sua fabricação, ter alto desem- penho e proporcionar integração em larga escala, isto é, seu tamanho é cerca de vinte vezes menor que o Transistor de Junção Bipolar - TJB, permitindo que um grande número de transistores seja produzido em um mesmo circuito integrado. Os mesmos autores afirmam que o MOSFET - Metal Oxide Semiconductor Field-Effect-Transistor (Transistor de Efeito Aplicando o MOSFET de forma a reduzir indutâncias e capacitâncias parasitas em dispositivos eletrônicos
Tiago Almeida de Oliveira Mário Marcos de Brito Horta Arlete Vieira da Silva Parte 1