Pré-visualização parcial do texto
Baixe Solver Rao 4 edição e outras Notas de estudo em PDF para Engenharia Mecânica, somente na Docsity!
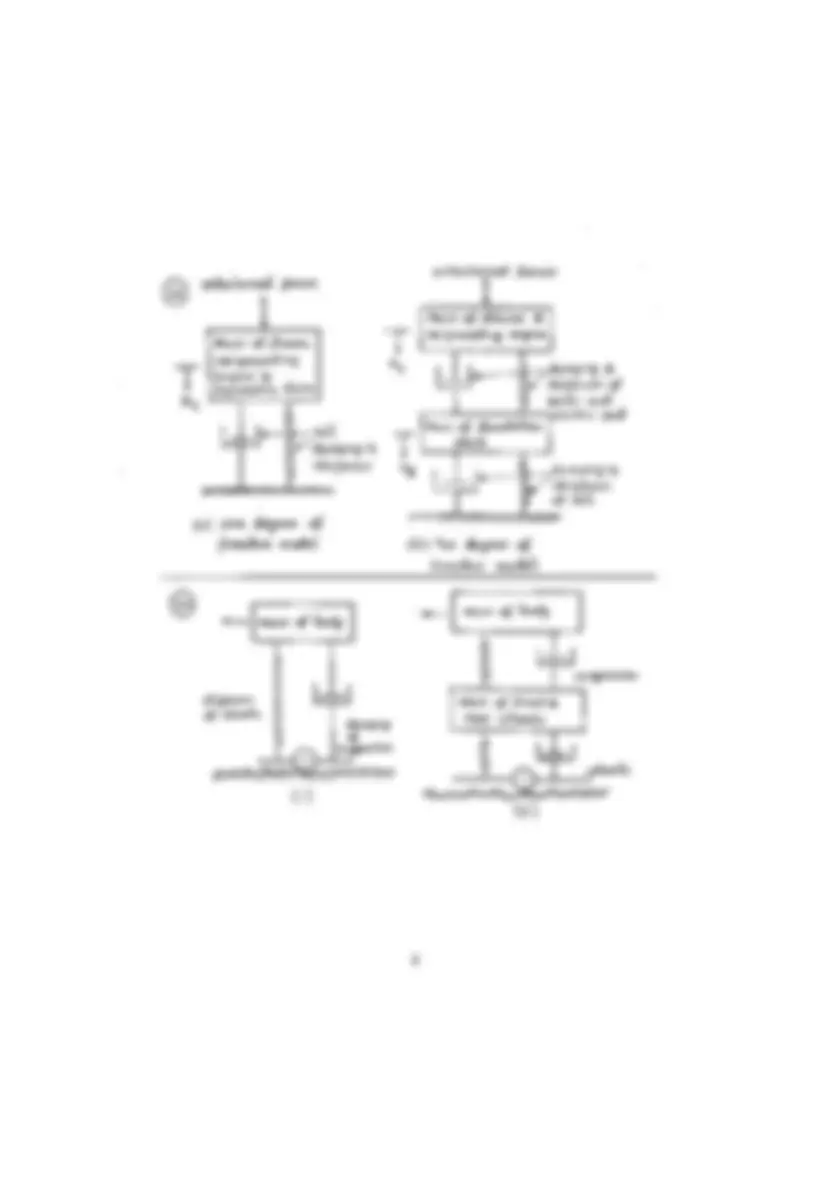
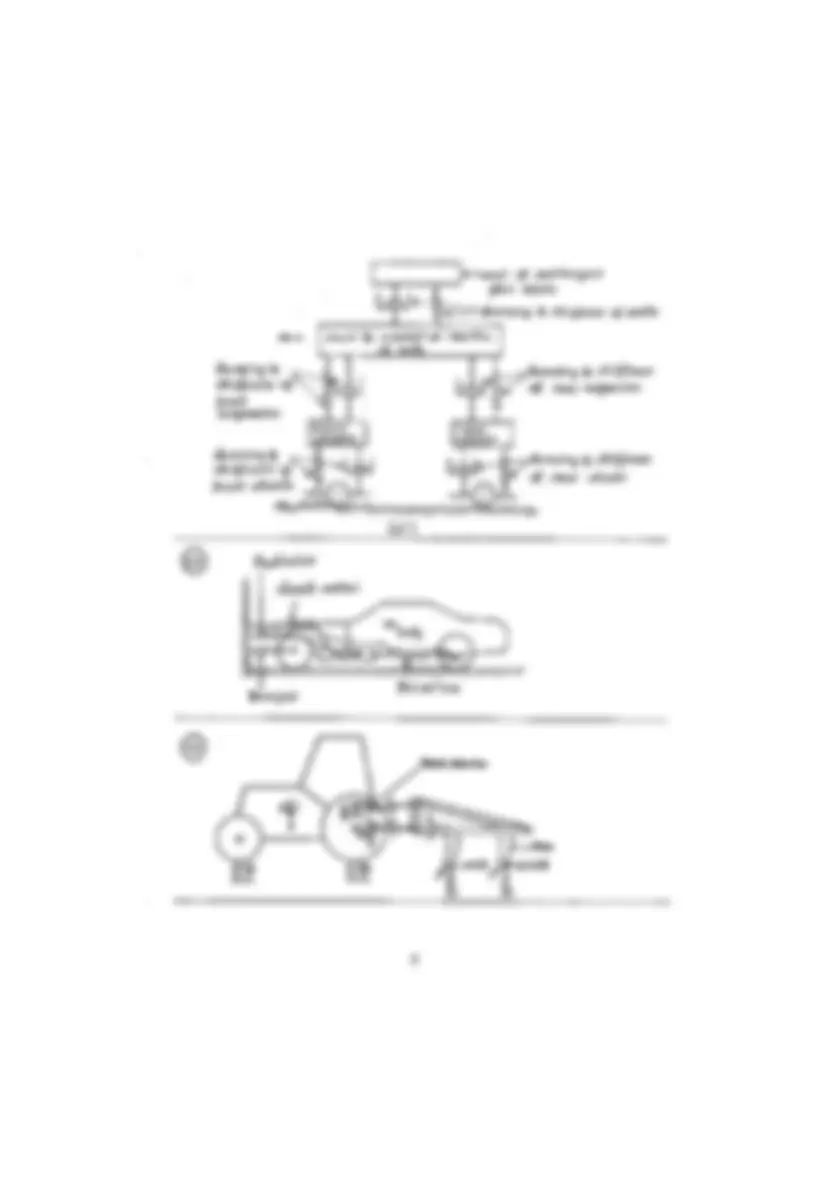
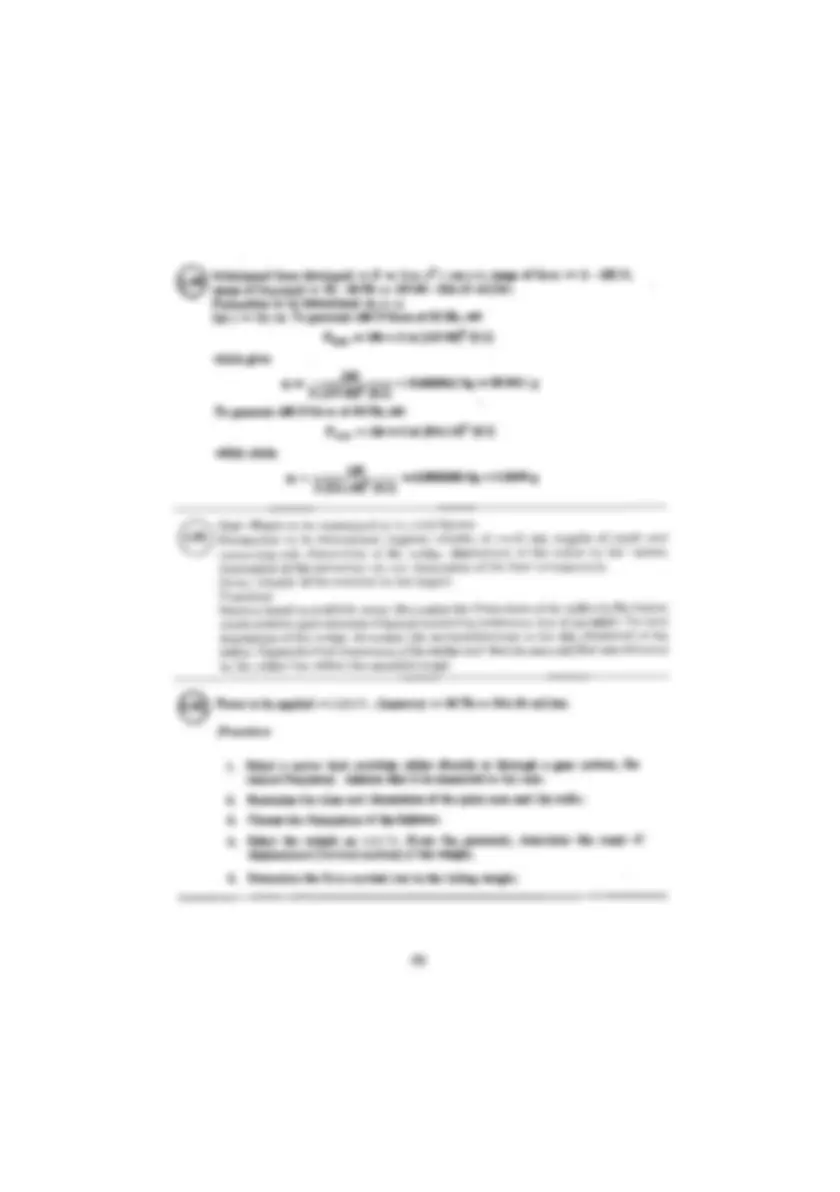
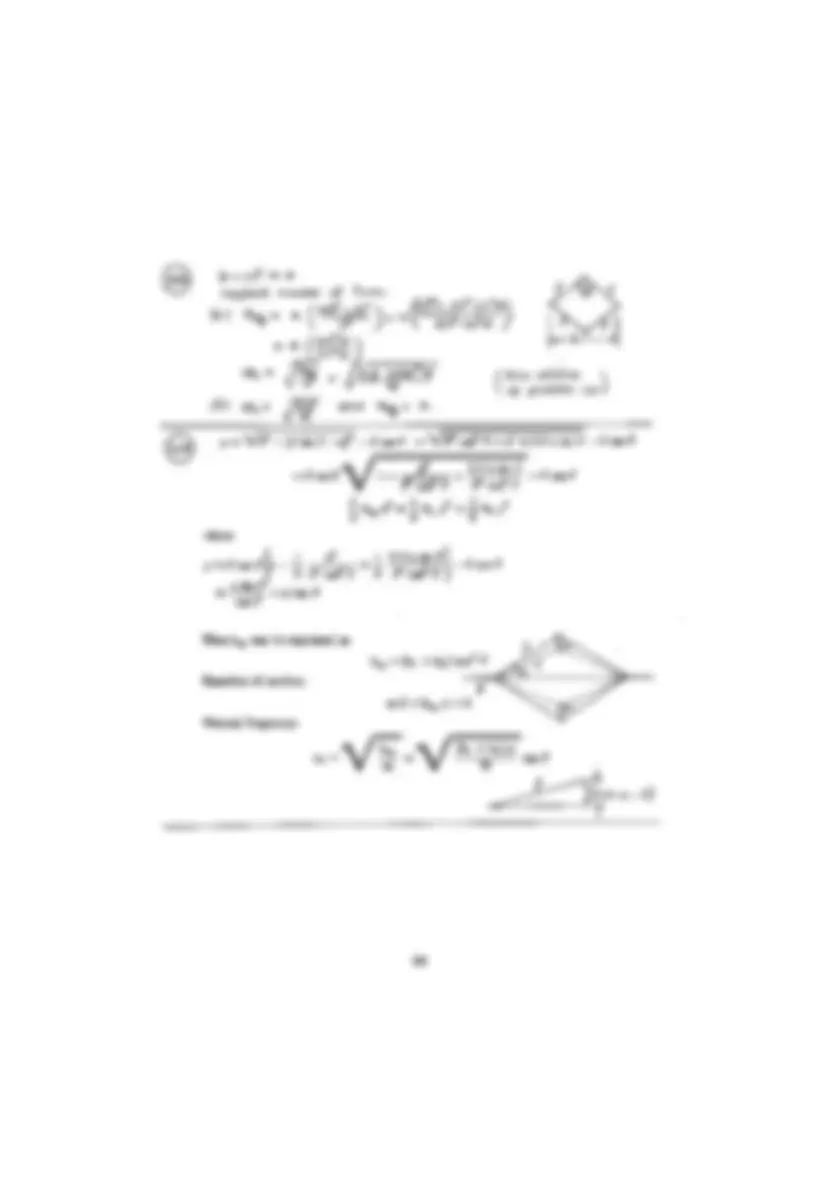
Mechanical" fik Fundamentals of Vibration Chapter 1 Head, upper torso, hips and legs Head Head upper torso and nECk.. - ia Spinal =—-. tlm CEL upper torso Hips and legs L E au spinal É ay eolumm PlArms ! Hips and legs shoulder CUCCAAÇÁS Legsecl8 sl (i ii) Windshieid Instrument panel —— Slant footboard Impact force €-—mass of passengers plus seats LHR+.. 722 damping & stiygness of seats «+«— | mass & mementof inertia, o£ bodg damping & 1 dampin EusE Re-- ...L ing 8 stiffness stiffmess A ] [LIS os rear suspension Front a suspension Front rear wheels wheels stiffness of “a Sront wheels damping & == aa 7 (iii) JL je-- + sdamping & stiffness al of rear wheels 7, (5) Radiator sheeb metal Plow (2) 2. 4 1 x do” da” Bra tag (7 1% %s ) ; phs+2kg%+ tt He & A .+ 4 te tg fetty tr tao As (her to) totskytera bota do do ksbata Rs 42 dl destes t+ t+ te Ko%z Rot tetas 4 stea teg +LMiRah pkiate, dh, ley Rã 2 e Epuiva lence of potentral energies gives z 2 z Fra 04 + Ea d+ tele Let talo to) ++ tes(ot,) = %23= for series springs tis trand dg: ! ) LN + + % tita ds RP É 03 tas Rates + E Using energy epuivalence, 2 2 ã tego = + toi l ks 6 +% 2 2 “eg= Ret Ke + lis tali+ ts ti LKR + Lt (08) o as t Rd + RÉ kg : He = + (to Kjtea tes + Rest 46) ter tats+ tsk (8) For sim ply supported beam, load at middle, u8 Ez as(zoexo (15!) t= D = z 12:36 x10' N/m where Iz + (u23 (o) 154 m?. 8 = original deflection = sa = moram = 3906-844 7x5” r when spring k is added, teg = t+ tt New de£lection= PE 8. . Amp (0º) Slecton= TE = hs go SÊ cat t = k++%, te=3%=37.08 xt” N/m Let x= vertical displacement of mass M, x, = resulting deformation of each inclined spring - From eguivalence of potential energy, tregW=3 (44%) 5 (eo + (E From geometry » (=x 4 = + -afx cosa al PR =0 ted) Solvin (81) x = Lesa É + fi - lama) MA 1 (E2) 3 RE cost Using the relation li-e = a4- £ 2(E2) con be rewritten as x = fesa [rs fu (Liam alum 23H (E) ZE costa cost Assuming x to be smail, we use. minus sign and neglect x7 compared to 2Lx, im (E). This gives teg= 3% costa mn a similar manner, Ce = 3€ costa ko - fa tez | pr Dt 23 dz + ks m (o [| Ê E — dr k . ta Arg = = s2 » t cigid E . . 1 Ka3 bar rom kinetic energy » (masstess) a . am (+ ram) (6) 76? From potential energy» m 2 2 2 2h) + ias (bh) 44 k, dst tuto) = tteço” % A 2 2 : a . eg = my 4 + (mam t; 3 tag = m,82+ boa lot tt te dao E. TO Da + + qo AT 4,= EM, mEt(d+t) w= mEDA ha x al a t(d+t) kp= k gives L, = prA* v From problem 1.16, k = with y = 1.4 for air Let p = 1.4 MPa 6 2 2 - Max 10)(gA A k = 13,000 N/m = 6.6326 x 103 v v Let diameter of a piston=d = 5 cm A= 4 (5x 1022 = 1.9635 x 103 m? v="> = 6.8127x 10-4m$ 6.6326 x 10 Leth = 5 cm; 5 D2(5 x 102) = v > D=0.12166m (O =2(10º)x+4 (107) x? Around x: Fx) = P(x”) + e ly (x== When x" = 102 m, F(x') = 2 (10º) (10?) + 4 (107) (10º) = 240 N e le =a+3bx!=2 (10!) +3 (4) (107) (1074) = 32000 Hence F(x) = 240 + 32000 (x - 0.01) == (32000 x - 80) N Since the linearized spring constant is given by F(x) =koq X we have kg = 32,000 N/m. Fizox tb x) sis Springs m series: W= 0,8 + b;52 (1) W= 02 8,+b; 8? (2) —— W= ke Est (3) db 8e=8+ 85 (4) Solve Egs.(1) and (2) Sor & and E, E) respectively. Substitute the result dal TO im Eg.(4) amd then in Ep) to à find tep W Springs in parallel; W= F+ Fz 3 = a8 + bi 8% + 0,8 + ba Est = teg ôst o 2 2 da te = tb Sra, +b 8 ep 10 o r(x)=(01-0.05xm + . 012 m É | E 7 l ES o ET EK im , | J= E rf = area polar moment of inertia at section x = 1.5708 (0.1 — 0.05 x)! mf Knowing that the angle of twist, 9, between the ends of a uniform shaft of length é under a torque T is given by À = = the angle of twist for an element of length dx can be expressed as Tão Tx GT (go (199) 1.5708 (01 — 0,05 x) The total angle of twist can be determined by integrating Eq. (1) from x==0 to 1 as: dg (1) + T de o T - dx ?= 9 (12.5664 (1010) (0.1 — 0,05 x)! [=mo O] ) (0.1 — 0.05 x) (2) 1 1 —0.05 But f dx p= 17 (0.05 de) =-20 | dy , o (0.1—0.05 x) 0.05 q (0.1 — 0,05 x) o (0147) = 4.6667 (10!) wherey =—0.05 x g = Eleseom) (108) 12.5664 (101º) Hence (0.3714 (1079)) rad This gives k, = E = 2.6925 (10º) N-m/rad The steel and aluminum hollow shafts can be treated as two torsional springs in parallel. For a hollow shaft, E 2.18 ma te=357 Dl -d) For the steel shait, G=a0(10º)Pa,€=5m,D = 0.25m,d= 0.15m, and hence ke, = a(s (10) (0.25 — 0.154) = 5.34072 (10º) N-m/rad 32 (5) (0) For the aluminum shaft, G = 26 (10) Pa, €=5m,D=0.15md=ê01m,and hence ; ke, = o (0.15! — 0.10!) = 0.207395 (10º) N—-m/rad ka =k, +k = 5.34072 (10º) + 0.20739 (10º) = 5.54811 (10º) N-m/rad (b) With G= 26 (10º) Fo, f= sm, D=olGSm and d= 0:05, 12 3 Ki = (26 x10º) 4 t2” ——————. a 2 32 (6) (outs ) j Key =, «Kg = 5.34072 x10 + 0:255255 xué = 5:595975 x10 - 0105") = 0:255255 x 16º N-mtad n-m/rad adi For Helical spring k = (128) PENSE ganR? (82 x 10º) (5 x 102)! = 287.2685 kNj (64) 10) (15 x 10:33 — 287-2685 kNim Spring 1: k, = (27 x 10º) (2.5 x 102)! (64) (10) (12.5 x 107) (a) Spring 2 inside spring 1 (parallel): k, = k, + k = 245,706.0 Nim (b) Spring 2 on top of spring 1 (series): Lo 1/1 kt Ka km k, kk, Spring 2: k, = = 8.4375 kNim which gives Kg = 8147.76 Nim Ga! For a helical spring, k = pens 64nRº — (82x 10) (2.5 x 10% = = 14,829.28 N/ 1É (64) (10) (15 x 102 8 m — erx 10º) (1.25 x 102)! 2 64(10) (12.5 x 1072) (a) Spring 2 inside spring 1: E k, + k, = 15,356.63 Nim 1 1 1 Spring 2ontopofspringl. 1 =T+T (b) Spring p of spring Ea! = 527.34 Nim — Mk | (14,829.28) (527.84) eq k+k, 1482928 + 527.34 or k, = 509.28 Nm 13 Axial stiffness = AE =* (D2— É e a E; 9 = 5 (0.00752 — 0.00739) 280 X 28 = 464956 Nim =K, Torsional stiffness = rG (D* — d?) 324 = n(88x 10º) 32(D) (0.0075º — 0.0073º) = 2.6421 N -mírad = K, for heat exchanger with 6 tubes: Axial stiffness = 6K, = 2789736 N/m Torsional stiffness = 6K, = 15.8524 N.m/rad (29 Assume small angles € and 04; EM =( É)o = Cel x,= horizontal displacement of c.G. of mass mp = & [o x,= vertical displacement of e.g. of mars m = ana h% nb, horizontal displucement of Springs kjamd ks = q (n+t) vertical displacement of springs ks and to=al= bth9/E, Eguivalence of tKinetrc energies gives ia Zh Mk ES nu .NÊ az + lo) = En Lala dm Loma (E . - 2 : Teg = nt % (h/8) +mr2s mar (t/63 Eguivalence of potential energras gives à z ter 9 = + 771 + $ Fay + + kz, o ++ teta o With az d+ ko sã *3 tea /Cest 4) H= o(r+t), gs hlio/t and Os po/h , - z tea te 2 2 à he (ter ta) (me) + (E) hide + tt Ke he z Ro 4 From eguivalence of kinetic energies, 1 “2.4 “2 4 «2 4 .2 = m 4 = mM + pm x +72%89 2 & me = me (E rms (E 15 Let 6, - angular velocity of the motór (input) Angular velocities of different gear sets are: Eguivalence cf kinetic grersies gives Ly otos Zn 2 .2 92 =19, qêsaz ebor 6 + E dd + 4 Tod ond * dg = (Lotort T+ (n+ alo + en E E n 2 + + (mn + Toad) (A = EN + Nam (3 Fqpívelence, of Kinetie energies ves = ana i %g a = 4 % é + í 5 o” where 6, à (21) 2 = 5 (Et Jg H+ d +) (33 When point A moves by distance x =xy, the walking beam rotates by the angle & =>. és * do This corresponds to a linear motion of point B: xg = 64 £z z 3 and the angular rotation of crank can be found from the relation: eee r xa =re sin 0, +€, cos b=r sin O, +€4 VAR [A 4 For large values of é, compared to r, and for small values of x and 9, we have xp mê mwpHrsnf=ro=— = Te fa fe The kinetic energy, of the Systera cam be expressed as T=-Imin+ vis Ra EM Equating this to T = — À ma k = a De à we obtain 2 bhasfo mam tg ti lg (.39 When mass m is displaced by x, the bell crank lever rotates by the angle 9, = > This ] makes the center of the sphere displace by x, = 0, €y. Since the sphere rotates with out shp, it rotates by an angle 16 Damping constant desired = C = 180 N- s/m, viscosity of the fluid =u=30x103N-sim? 3 2d? ca saD'e(+ Do) 14 Eq. (1) » da + A d Assuming x = a as the unknown with £ = 5 em, Eq. (1) can be written as £ —2 c= p[2mtx8] É + 2] or 180 = (30 x 103) (emtsx10%] w É + 2) 4 x 4 x This gives x3 + 2x2 — 50,929.58 = O Using a trial and error procedure, the solution of this cubic equation can be found as x = 36.41, Using D= 7.5 cm, we getd= Ih = 0.206 cm 36.41 Damping constant 20 x 109 N sím SAE 30 at 21ºC diameter of piston < 65 mm D = diameter of piston 3nD'€ 1+ 94 d = radial clearance a dê t = axial length of piston D p= 0.31 Pa.s Solution: c=u | Let d = 0.02 mm, D = 60 mm, and above equation gives: Bné(60?) 2x os2 10º=0.91/——— (1450 20x 10=0.3 [eso 60 . €=1.0135 x 103 (m) 18 (9 Tangentrol velocity of inner eglnder = Las For small d, rate of change of velocity of Pluid is dv. à do a Shear stress between eylinders is =u du DU Tt” a and shear force is - t+ F=TArea = + mo(l-h)= Freio Torgue developed = Ma= F.b For small h, rate of change of velocity of fluid in vertical direction is dv. ro dy + dv ro Shear stress is T=nm dy = dra Force on area dA = dr=T dA Torgue between bottom surfaces of cylinders is Me = ff ama ida wtere dmg= dr = prio dr do area. DA ar es TD? teo Me = ne J f r.dr do = ER re Sae Po (4-1) mp co Dt -= MED O(h Cas Total torgue = Mp=MutMa = a (* + ST Expressing My as GU =C WD/;, we set dampiny contont: c= Tap (1-4) N EM 2d 32h 19