Download Exam Document for Control & Power Engineering Unit at Manchester Met Uni and more Exams Electrical Engineering in PDF only on Docsity!
S177 08/03/
THE MANCHESTER METROPOLITAN UNIVERSITY
FACULTY OF SCIENCE AND ENGINEERING
DEPARTMENT OF ENGINEERING AND
TECHNOLOGY
SESSION 2002/
Examination for the BEng (HONS) ELECTRICAL AND ELECTRONIC ENGINEERING YEAR TWO
UNIT 64EE2106 : CONTROL AND POWER ENGINEERING
Thursday 22 May 2003
2.00 pm to 5.00 pm
Instructions to Candidates
Answer FIVE questions, at least TWO questions from each section.
All questions carry equal marks. The marks for each question are shown in parenthesis.
A table of Laplace Transforms is provided.
SECTION A
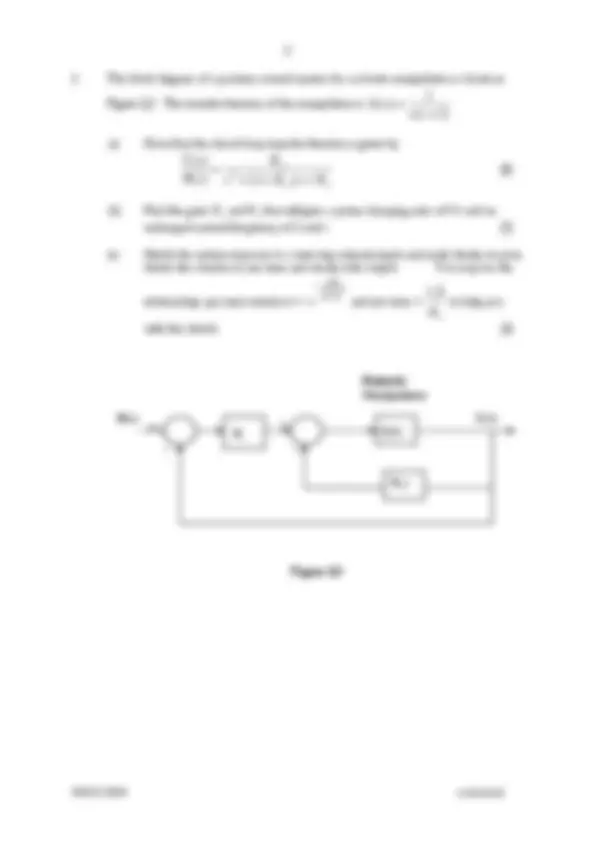
- A process is described by the transfer function
U s s
Y s
G s.
(a) What is the process time constant? [1]
(b) What is the process steady state gain? [1]
(c) Draw a sketch of the process response to a unit step input and show clearly on your sketch the time constant, steady state output and the approximate time taken to reach steady state. [4]
(d) Use the Laplace transform tables provided to find the equation for the time response, y(t), of the process to a unit step input u(t) = 1.0, t ≥ 0. [4]
The process is now placed under closed loop proportional control as shown in Figure Q1, with K = 3.
(e) Find the closed loop system time constant. [4]
(f) Find the steady state error to a unit step setpoint input. [3]
(g) Discuss how the system time constant and steady state error will change as the gain, K, is increased. [3]
setpoint input K G(s)
controller (^) process
Y(s)
Figure Q
- (a) For the systems whose transfer functions are shown below, sketch the Nyquist diagrams. Clearly show the low and high frequency points.
(i) ( 2 1 )
s
G s ; (ii) (^1 ) ( 2 )( 1 )
s s
G s ;
(iii) ( 2 )
1 (^ ) 2
s s
G s [6]
(b) The frequency response data obtained from experimental data is shown in Figure Q3 (see separate sheet).
(i) State, with reasons, what the order of the system is likely to be. [2]
(ii) Determine the gain and phase crossover frequencies, and the gain and phase margins of the system. Sketch on FigureQ3 (provided) all the relevant measurements. [8]
(iii) If a proportional controller of gain 0.5 is introduced, state how each of the parameters determined in (ii) will be affected. [4]
- (a) In the context of a Programmable Logic Controller (PLC), briefly explain what is involved in the Scanning process and list THREE factors that affect the scanning time. [6]
(b) Figure Q4 shows a reaction vessel in which two liquids of fixed proportions are mixed for 60 s and then discharged to another part of the plant. This vessel control system is to be implemented on a Mitsubishi FX PLC. Initially, when the vessel is empty (Level transducer X1 is OFF) and the valve (Y4) is closed, the pump Y1 should operate until the liquid level reaches L (indicated by X2 becoming ON). The pump Y2 should then turn on until the liquid level reaches L3 (indicated by X3 becoming ON). The stirrer Y3 should then operate for 60 s after which the valve (Y4) should open to empty the tank until the level reaches the level L1 (indicated by X1 becoming ON) indicating an empty tank. The valve is closed once the tank is empty.
(i) Develop a table of signals required to perform the above actions. [4]
(ii) Use the Sequential programming method to develop a ladder diagram to carry out the above sequence of operations. [6]
(c) Briefly explain why process control systems are commonly referred to as regulatory control systems. The transfer function of a typical system encountered in process control usually includes a delay term. Give TWO practical examples of the phenomena that give rise to the delay term. [4]
SECTION B
Pump Y1 (^) Pump Y
Valve Y
X
X
X
Stirrer Y Figure Q
S177 08/03/04 END
- A forward converter is shown in Figure Q7.
(a) Show that the output voltage is given by VOut=DVin where D is the duty cycle ratio of the converter. [12]
(b) Assuming that the converter has the particulars shown below, determine the minimum operating frequency, f , of the converter.
Input voltage Vin =24 V Output voltage Vout=12 V Smoothing inductor value L=75 μH
Maximum ripple component of inductor current ∆ I = 2 A
[8]
- (a) Sketch the usual form of the torque/speed curves for a poly-phase induction motor and show that for small slip s, the torque is proportional to s/R , whilst for large slip, it is proportional to R/s. R is the per phase rotor resistance. [ 8 ]
(b) A three-phase induction motor is wound for 4 poles. The stator is delta connected with 240 conductors per phase and the rotor winding is star-connected with 48 conductors per phase. The rotor winding has a resistance of 0.013 Ω per phase and a leakage reactance of 0.048 Ω per phase at standstill. The supply voltage is 415 V, 50 Hz.
Assuming the distribution factor to be 0.96 and the pitch-factor to be 1.0 for each winding, calculate: (i) the flux per pole; (ii) the rotor e.m.f. per phase at standstill with the rotor on open-circuit; (iii) the rotor e.m.f. and current per phase at 4% slip; and (iv) the phase difference between the rotor e.m.f. and current for a slip of 4%. [12]
You may assume that the impedance of the stator winding is negligible.
Figure Q
VOut Diode
L
C
Vin