Download Control Engineering Exam: Electrical & Electronic Eng, Manchester Met Uni, 2006/2007 and more Exams Electrical Engineering in PDF only on Docsity!
THE MANCHESTER METROPOLITAN UNIVERSITY
FACULTY OF SCIENCE AND ENGINEERING
DEPARTMENT OF ENGINEERING AND TECHNOLOGY
SESSION 2006/
Examination for the BEng (HONS) ELECTRICAL AND ELECTRONIC ENGINEERING YEAR/STAGE TWO
UNIT 64EE2106A : CONTROL ENGINEERING
Friday 25th^ May 2007
9:30 am to 11:30 am
Instructions to Candidates
Answer ALL questions in SECTION A and TWO questions from SECTION B.
A separate Data Sheet is provided.
Also provided is Figure Q5. If answering this question you must hand this sheet in with your answer book.
Students are permitted to use their own calculators subject to Faculty Guidelines.
25/07/2007 S
25/07/2007 S163 Question 1 continued overleaf
SECTION A
Answer ALL questions in this section. (Total 50 Marks)
- (a) A force f(t) N acts on a mass M kg. The force is opposed by a viscous frictional force with a frictional constant, B N/m/s, as shown in figure Q1(a). Show that the differential equation describing the motion, x(t), of the mass is
dt
dx t
B
dt
d x t
f t M
2
= +. [3]
Given that M = 1000 kg and B = 100 N/m/s find the transfer function
F s
X s
G s = [3]
Force f(t) N Mass M kg
Frictional force
Displacement x(t) m
Figure Q1(a)
(b) (i) A tachogenerator has a steady state gain of 0.02 V/rad/s and a time constant of 0.1 s. Write down its transfer function. [3]
(ii) Sketch a graph of the output voltage,v(t), for a step change of input speed of 50 rad/s showing clearly the steady state voltage output, time constant and approximate settling time. [3]
(c) (i) Write down the transfer function of a 2nd^ order system that has a steady state gain of 2, a damping ratio of 0.5 and an undamped natural frequency of 8 rad/s. [3]
(ii) Sketch the unit step response showing clearly the overshoot and 5% settling time. [3]
- (a) Estimate the low and high frequency gain and phase of a system
described by the transfer function ( 0. 25 )
s
G (^) a s. [4]
(b) Show, using a sketch, how phase margin and gain margin can be measured on a Nyquist diagram. [4]
(c) A system is described by the transfer function ( 2 1 )
s
G (^) c s. Identify
the corner frequency and sketch the Bode Gain plot using asymptotic approximation. [4]
(d) The frequency response data from a system is shown in Table Q2(d). Determine the phase margin and gain margin for this system. [4]
ωrad/s .44^ .49^ .55^ .74^. | G(jω) | 1.13^ 1.00^ .88^ .57^. ∠ G(jω) -110^ -120^ -130^ -160^ -
Table Q2(d)
(e) In an assembly plant a START button is pressed to start a conveyor belt and reset a counter. A sensor records the number of components passing through on a conveyor belt. The components fall into a box at the end of the conveyor belt. When 10 components are counted, a solenoid is activated to push the box to a finisher area. Draw a ladder diagram that can implement this section of the process on a PLC. [4]
(f) Controllers used in process control are usually referred to as ‘regulators’. Justify this statement stating your reasons. [3]
(g) Explain what is meant by ‘Proportional Band’ in the context of process control. [2]
25/07/2007 S163 continued
SECTION B
Answer TWO questions in this section. (25 marks each)
- The block diagram of a position control system for a valve positioner is shown
in Figure Q3. The transfer function of the manipulator is
s s
G s
(a) Show that the closed loop transfer function is given by
2 1
2
1
s K s K
K
Rs
Y s
= [8]
(b) Find the controller gains K 1 , K 2 , that will give a system damping ratio
of 0.7 and a rise time of 1s. [10]
(c) Sketch the resultant response to a setpoint step change of 20%. [3]
(d) The transfer function represents a tachometer. How would the system response change if the tachometer failed so that its output was zero?
sK 2
[4]
Valve Positioner
Manipulator
sK (^2)
K 1
R(s)
Figure Q
Y(s) G(s)
25/07/2007 S163 continued
- (a) Briefly explain why frequency response analysis is useful in designing control systems. [4]
(b) Sketch the Nyquist plot for the transfer functions shown below. Clearly show the low and high frequency points.
(i) ( 1 )( 2 )( 4 )
s s s
Gs
(ii) ( 2 1 )
s s
Gs
[6]
(c) The Bode diagram showing the open-loop frequency response of a process is shown in Figure Q5 and selected data is given in Table T5.
(i) What is the steady state gain of the process?
(ii) Find the gain margin and phase margin of the process and comment on the relative stability in closed-loop that these measures suggest. Mark the gain and phase margins on Figure Q5 and attach the sheet with your answer script.
(iii) Evaluate the proportional gain required to give a phase margin of 50^0.
(iv) If a gain of 1.8 was implemented using a proportional controller, evaluate the new the gain margin. [15]
Frequency (rad s-1)
Magnitude Phase (degree) 0.5 1.4 - 0.8 1.2 - 1.0 1.0 - 1.4 0.78 - 1.7 0.56 - 2.2 0.37 - 2.8 0.24 - 3.3 0.17 - 3.8 0.12 -
Table T5 Selected data from frequency response test
25/07/2007 S163 Continued
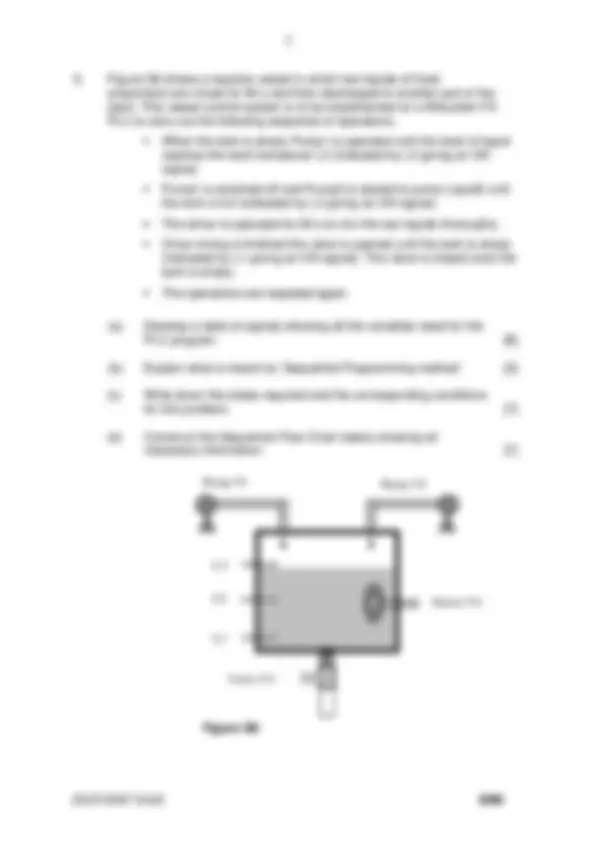
- Figure Q6 shows a reaction vessel in which two liquids of fixed proportions are mixed for 60 s and then discharged to another part of the plant. This vessel control system is to be implemented on a Mitsubishi FX PLC to carry out the following sequence of operations. - When the tank is empty Pump1 is operated until the level of liquid reaches the level transducer L2 (indicated by L2 giving an ON signal). - Pump1 is switched off and Pump2 is started to pump Liquid2 until the tank is full (indicated by L3 giving an ON signal). - The stirrer is operated for 60 s to mix the two liquids thoroughly. - Once mixing is finished the valve is opened until the tank is empty (indicated by L1 giving an ON signal). The valve is closed once the tank is empty. - The operations are repeated again.
(a) Develop a table of signals showing all the variables need for the PLC program. [8]
(b) Explain what is meant by ‘Sequential Programming method’. [3]
(c) Write down the states required and the corresponding conditions for this problem. [7]
(d) Construct the Sequential Flow Chart clearly showing all necessary information. [7]
Pump Y1 (^) Pump Y
L
L2 (^) Stirrer Y
L
Valve Y
Figure Q
25/07/2007 S163 END
Student Identification Number : ______________________________________
Attach this sheet to your answer book.
10 -1^100
0
Frequency (rad/sec)
Phase deg
10 -1^100
0
20
Frequency (rad/sec)
Gain dB
Figure Q5 Open loop frequency response
S