Download Control Engineering Exam Questions for EE Unit 64EE3013 and more Exams Electrical Engineering in PDF only on Docsity!
S373 09/09/
TH E MANCH ESTER M ETR O PO LITAN UNIVER SITY
FACULTY O F SCIENCE AND ENGINEER ING
D EPA R TMENT O F ENGINEER ING AND TECH NO LO GY
SESSIO N 2000/
Exam ination for th e BEng (H O NS) ELECTR ICA LAND ELECTR O NIC ENGINEER ING (FULL- TIME/PA R T TIME) YEA R FO UR /FIVE
UNIT 64EE3013 : CO NTR O LENGINEER ING
Monday 21 May 2001
2.00 pm to 5.00 pm
Instructions to Candidates
A nsw er FIVE questions w ith not m ore th an th ree from eith er section.
Figure Q 1(a) and Jury Contours are provided on separate sh eets.
Break dow n of m ark s for each question are sh ow n in square parenth eses.
- (a) Th e root locus diagram in figure Q 1(a) is for th e system sh ow n in figure Q 1(b ). Th e point m ark ed on th e locus corresponds to th e closed loop pole w h en th e controller gain K = 0..
(i) A ssess th e dam ping ratio of th e com plex poles. [3] (ii) Find th e 5% settling tim e associated w ith th e poles. [2] (iii) Locate th e position of closed loop zeros and discuss th eir effect on system response. [3] (iv) Can th e poles be regarded as dom inant? [2] (v) Find th e gain to cause th e system to b e com e unstab le on closed loop. [4]
Sh ow any construction w ork on figure Q 1(a) and h and th is in w ith your answ er book.
(b ) W ith K = 0.8, find th e system steady state error to a unit step reference input.
[6]
ss s
K s
s +
Figure Q 1(b )
Section A
- (a) A ch em icalb atch reactor is m odelled as 2 1
− s
e Gs
s and its open-
loop frequency response is sh ow n in figure Q 3.
(i) Explain w h y such m odels are used in process controland sk etch th e process response to a unit step input. [3] (ii) Verify by calculation th at th e ph ase cross-over frequency is approxim ately 1.84 rs-1. [2] (iii) Verify by m easurem ents on th e Nyquist diagram th at th e gain m argin is approxim ately 2.5. [2] (iv) D e scrib e a m eth od by w h ich th ese m easurem ents m ay be approxim ated in closed loop and explain h ow th is can form th e b asis for self-tuning. [5] (v) D iscuss in qualitative term s th e effect of an increase in process dead tim e on th e gain m argin. [2]
(c) Explain w h at is m eant by feedforw ard control. W h at advantages m ay be gained by its use?W h y in practice m ust feedforw ard controlalw ays be used togeth er w ith fe e d b ack control? [6]
Figure Q
- (a) Th e state variab le m odelof a m otor is given by
y(t) [ ] x(t)
u(t) x(t)
x(t)
x (t)
x(t)
2
1
2
1
Th e state variab le, x 1 (t), represents m otor speed (radian per second) and th e input u(t), is m easured in volt. (i) W rite dow n th e differentialequation representing x 2 (t)
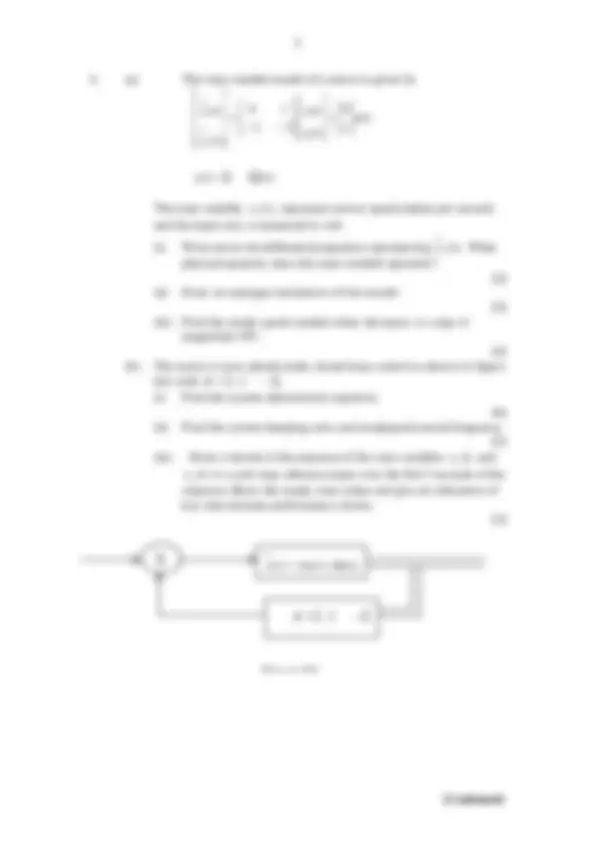
- . W h at ph ysicalquantity does th is state variab le represent? [2] (ii) D raw an analogue sim ulation of th is m odel. [5] (iii) Find th e steady speed reach ed w h en th e input, is a step of m agnitude 10V. [2] (b ) Th e m otor is now placed under closed-loop controlas sh ow n in figure
Q 4, w ith K =[− 2 − 1 ].
(i) Find th e system ch aracteristic equation. [6] (ii) Find th e system dam ping ratio and undam ped naturalfrequency. [2] (iii) D raw a sk etch of th e response of th e state variab les x 1 (t)and x 2 (t)to a unit step reference input over th e first 5 seconds of th e response. Sh ow th e steady state values and give an indication of k ey tim e dom ain perform ance criteria. [3]
Figure Q
∑ (^) x^ • (t) = Ax(t) + Bu(t)
K = [− 2 − 1 ]
- A plant w ith a transfer function Gp(z) is to b e controlled using a pole placem ent controller as sh ow n in Figure Q 6.
(a) D iscuss th e im plications for controller design if th e plant contains unstab le poles or zeros outside th e unit circle. [6] (b ) Th e continuous-tim e transfer function of th e plant is given as
ss
Gp s. W h en a sam pling intervalof 0.5 seconds is used,
sh ow th at ( 1 )( 0. 607 )
( )^0.^1065 (^0.^8467 )
z z
G z z p. Design a pole-placem ent controller
to give a closed-loop system w ith a second-order response w ith a dam ping ratio of 0.7, 5% settling tim e of 4 s and zero steady-state error for step inputs. [14]
R (z) (^) D (z) Gp(z) Y(z
Figure Q
- (a) Explain w h y a process reaction curve type of test is insufficient for accurately identifying param etric m odels of practical system s. Suggest a persistently exciting signalth at can be used for such tests. Give reasons and sh ow h ow it can b e generated. [6 ] (c) Th e input-output data ob tained from an identification experim ent is sh ow n in Tab le Q 7.
(i) Estim ate th e param eters of a first-order m odelth at fits th e data using least squares tech nique. [8 ] (ii) Explain h ow th e estim ated m odelcan b e validated. [6 ]
k 0 1 2 3 4 5 u(k ) 1 1 0 -1 -1 1 y(k ) 0 0. 2 0. 36 0. 288 0. 03 -0. 176
- (a) A h eat exch anger process describ e d b y th e transfer function
(z .z. )
G(z). 11 028
= (^2) − + is to b e controlled in unity fe e d b ack configuration such th at th e output
Y(z) follow s th e reference input R (z).
Sh ow th at a m inim um variance controller of th e form uk = 5. 5556 [ rk + 1 − 1. 1 yk + 0. 28 yk − 1 ]can b e
designed to m eet th e requirem ent. [8] (b ) If th e actualprocess gain is 10% h igh er th an th at indicated by th e m odel used in (a), estim ate th e steady-state offset th at m ay result w h en controlled in closed-loop using th e controller designed in (a). [5] (c) Sh ow h ow th e offset can b e rem oved. [3]
(d) Com m ent on th e nature of controlsignalgenerated by a m inim um variance controller and sh ow b riefly h ow excessive controlaction can b e reduced. [4]
Table Q