



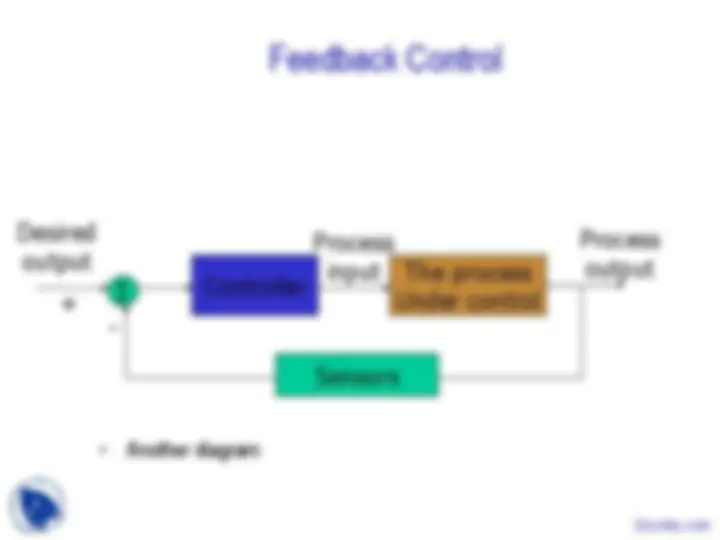
Feedback Control
Docsity.com





















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
In the class of computer sciences, we have a special class for the Microcontroller Systems. The main points in these slides are:Feedback Control, Simple Abstraction, Open Loop Control System, Inaccurate Effector, Static Environment, Feed Forward Control, Errors, Wall Following Robot, Oscillation and Set Point, Sensor Noise, Control Theory
Typology: Slides
1 / 35

This page cannot be seen from the preview
Don't miss anything!