



Motor control questions
Why do we need speed control?
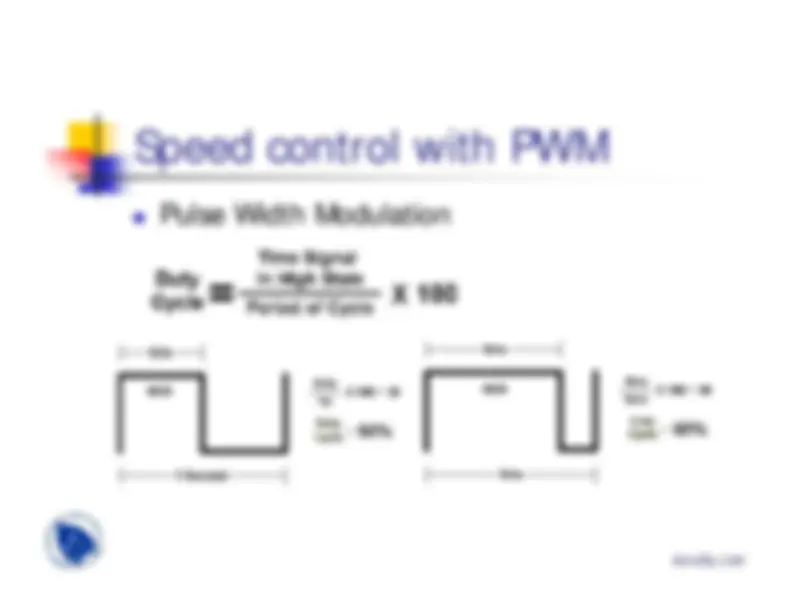
How is DC motor speed controlled?
How is motor direction controlled?
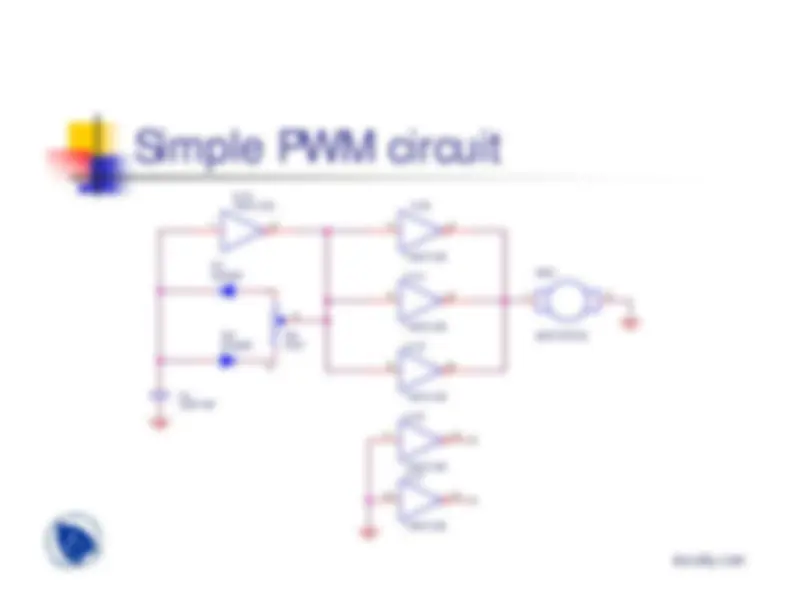
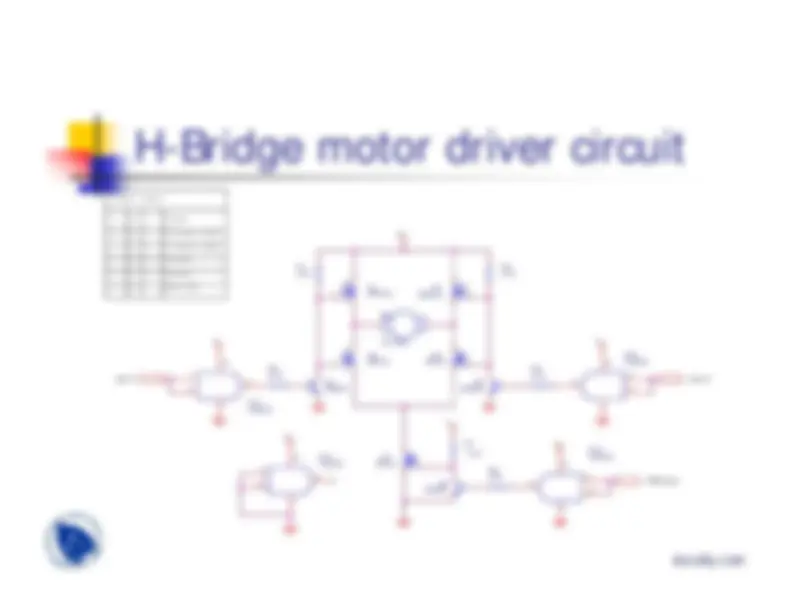
What circuits can be used?
docsity.com









Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
This project report was submitted to Dr. Anbu Manghirmalani at Birla Institute of Technology and Science. this project helped students to learn concepts of Control Systems in Electrical Engineering. It includes: Motor, Control, Speed, Direction, Circuits, independent, Platforms, Synchronize, Wheel, Bridge, Driver
Typology: Study Guides, Projects, Research
1 / 44

This page cannot be seen from the preview
Don't miss anything!
Motor speed shouldbe independent ofload.
Differential driveplatforms need tosynchronize wheelspeed to go in astraight line.
M1 DC Motor Q1IRF
Input A
Input B
PWM Input
Output
Channel
Brake
Channel
Brake
Forward
Reverse
Motor
Off
docsity.com
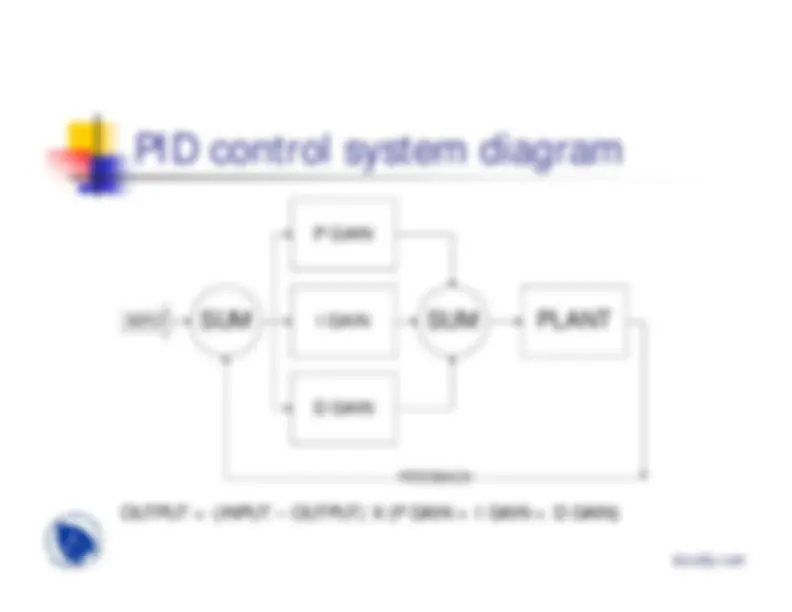
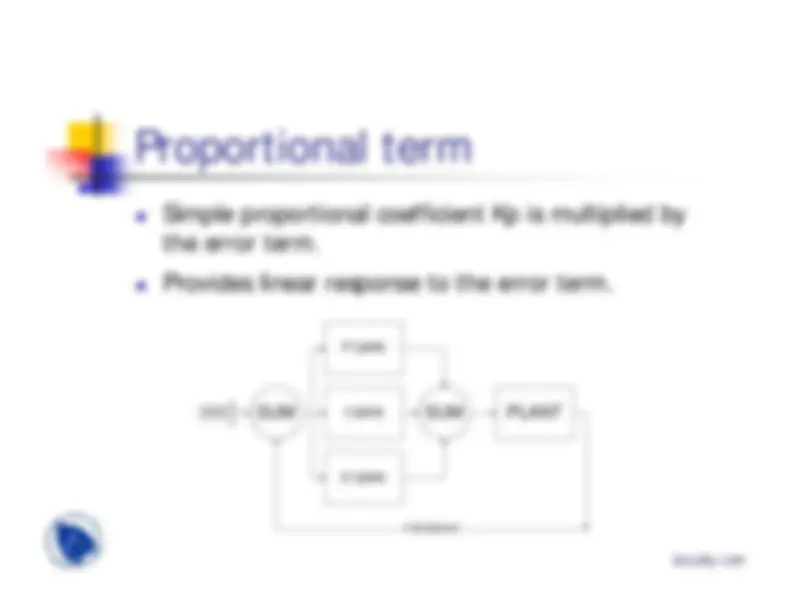
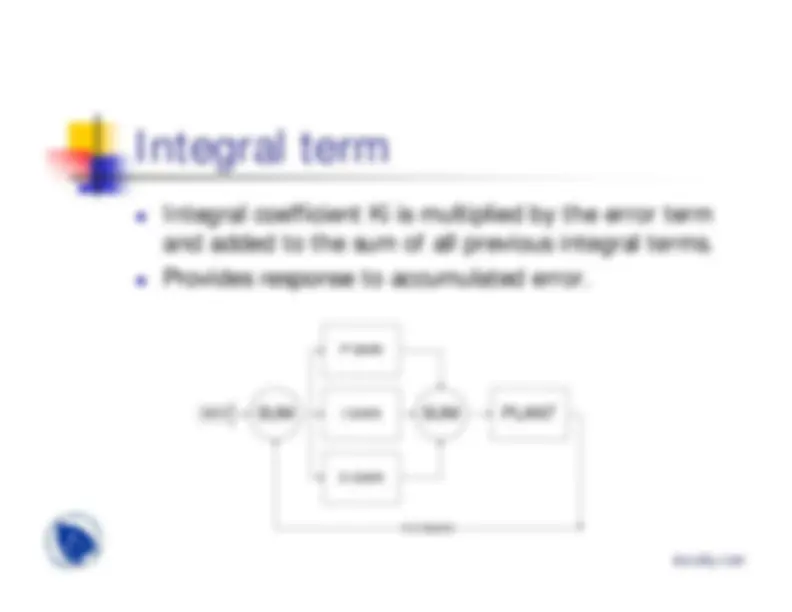
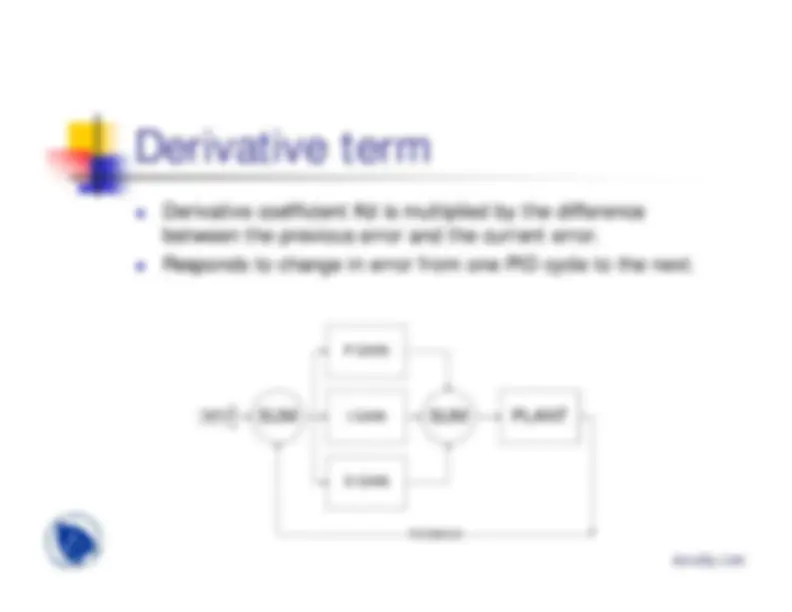
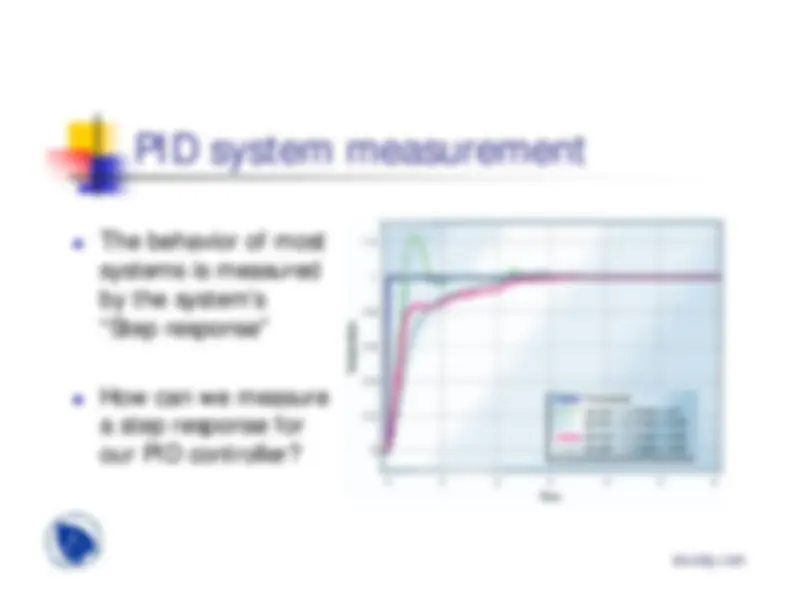
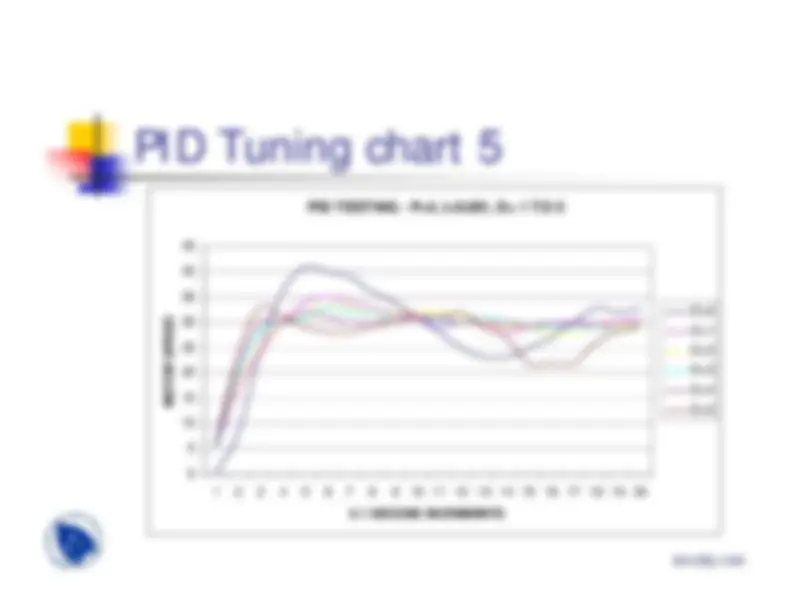
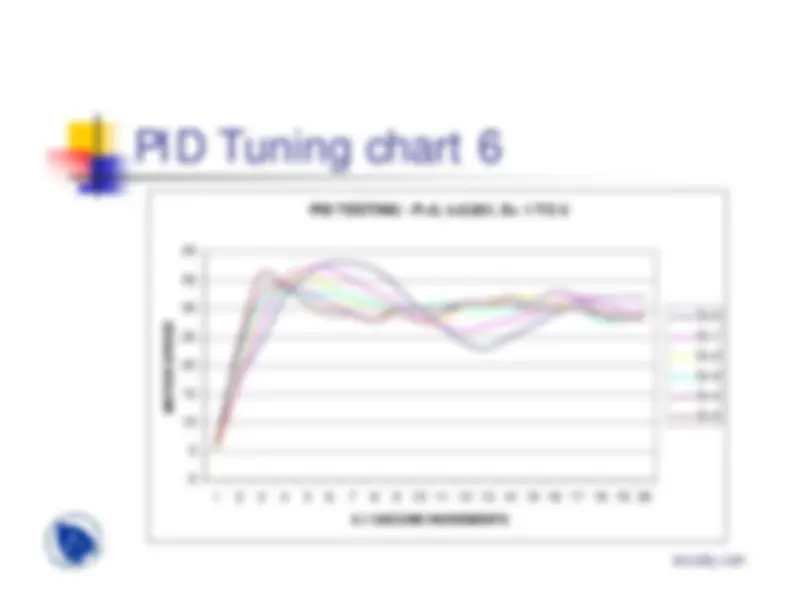
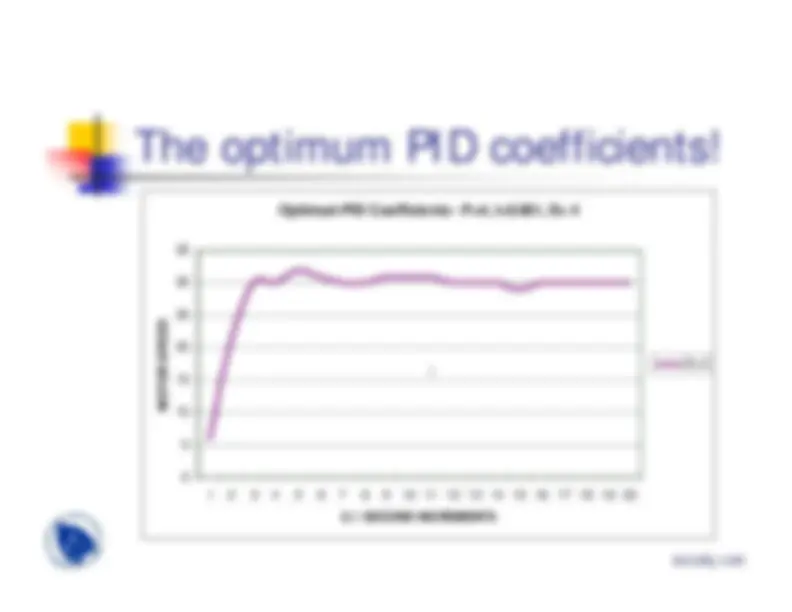
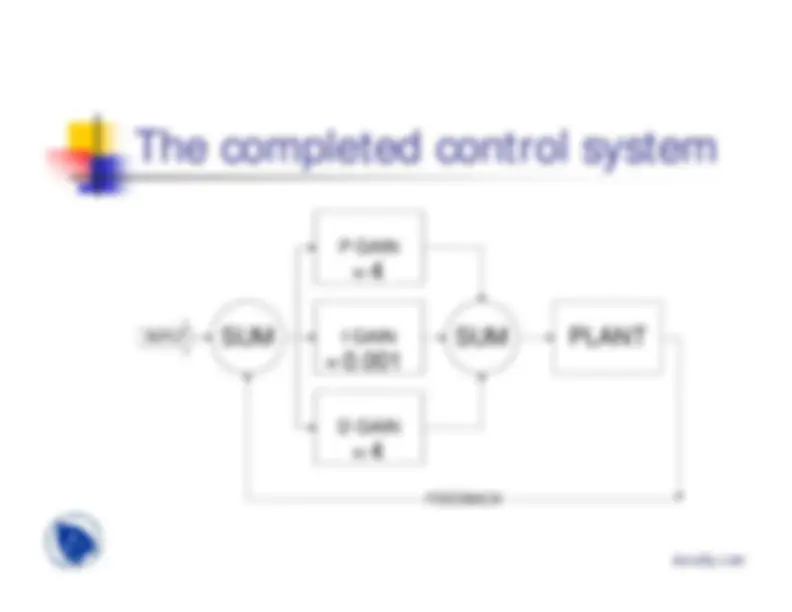
PID Closed loop control system^
PID controls the gain portion of theclosed loop control system.
PID algorithms adjust the gain to theplant based on several characteristics ofthe feedback, not just the currentvalue.
I GAIN
INPUT
FEEDBACK
P GAIN D GAIN
I GAIN
INPUT
FEEDBACK
P GAIN D GAIN