


SISTEMAS DINÁMICOS DE
PRIMER Y SEGUNDO ORDEN ,
SU MODELAMIENTO
MATEMÁTICO CON SIMULACIÓN
EN MATLAB
Laboratorio de control de procesos
industriales









Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
sdfsdfdsfsdfsdfdsfsdfdsfssssssssssssssssssssfdfdgghhfghjhkdhdhdhjyjyr
Tipo: Diapositivas
1 / 18

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
Laboratorio de control de procesos
industriales
Q_i
Electro válvula
h:
Nivel del
tanque
Sensor de
presión
hidrostátic
a Adecuador
de señal
Presión hidrostática^ Presión atmosférica
0-10 V Presión
h𝑖𝑑𝑜𝑠𝑡 á 𝑡𝑖𝑐𝑎
+24 V
0V
PWM(LOGO)
ON OFF
MPX5010DP
DATASHEET DE MPX5010DP:
https://pdf1.alldatasheet.com/datasheet-p
df/view/5185/MOTOROLA/MPX5010DP.html
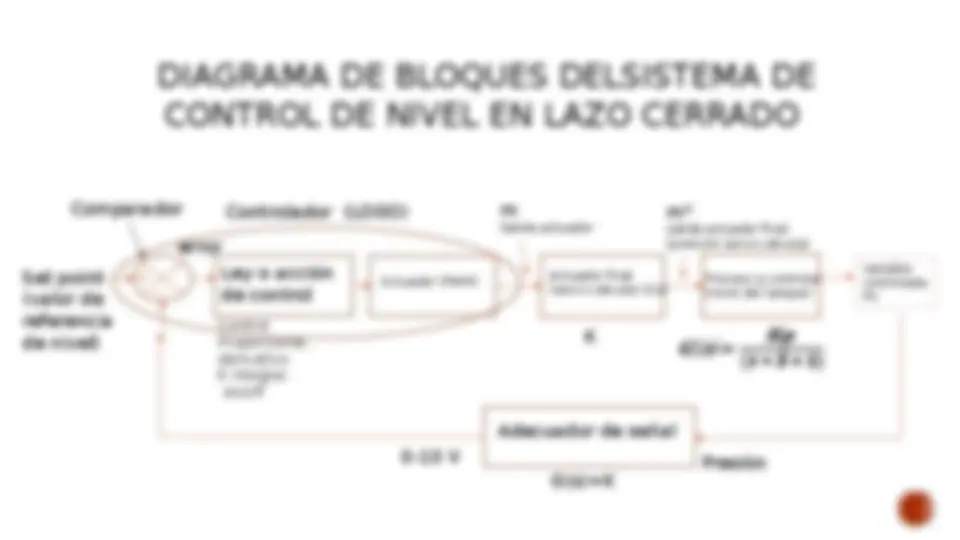
Preactuado
r final
Actuador
final
Set
point
Set point
(valor de
referencia
de nivel)
Ley o acción
de control
Actuador (PWM)
Actuador final
(servo válvula) G(s)
Proceso a controlar
(nivel del tanque)
Variable
controlada
PV
m*
salida actuador final
(posición servo válvula)
m
Salida actuador
error
Adecuador de señal
Presión
G(s)=K
Control
Proporcional,
derivativo
E integral.
on/off
Comparador Controlador (LOGO)
𝐺 (^ 𝑆 )=
1
𝑅𝑆𝐶
1 +
1
𝑅𝑆𝐶
=
1
𝑅𝐶𝑆+ 1
𝐺 ( 𝑆 )=
𝐺 ( 𝑆)
1 +𝐺 ( 𝑆 ) 𝐻 (𝑆)
Donde:
𝐺 ( 𝑆 ) → 𝐺𝑎𝑛𝑎𝑛𝑐𝑖𝑎 𝑒𝑛 𝑙𝑎𝑧𝑜 𝑑𝑖𝑟𝑒𝑐𝑡𝑜
𝐻 ( 𝑆) → 𝐺𝑎𝑛𝑎𝑛𝑐𝑖𝑎 𝑒𝑛𝑙𝑎𝑧𝑜 𝑖𝑛𝑣𝑒𝑟𝑠𝑜
𝐺 (^ 𝑆 )=
𝑅𝐶𝑆
1 + 𝑅𝐶𝑆
=
𝜏 𝑆
1 +𝜏 𝑆
𝐺(𝑆)
𝐻 (𝑆)
Ejemplo:
1 / 𝑅 1 /𝐶𝑆
𝐶𝑆 (^) 𝑅
FUNCIÓN DE TRANSFERENCIA G(S)
Ejemplo: Circuito RC
R = 1 Ω ; (^) C = 1 F
𝑉 𝐶
( (^) 𝑡 )=
1
𝐶
∫
𝐼 𝐶
𝑑𝑡 → 𝑰 𝒄
( (^) 𝒕 ) (^) = 𝑪
𝒅 𝑽 𝒄
( 𝒕 )
𝒅𝒕
𝑰 𝒄
( 𝒕 )
𝐺 ( 𝑠)=
𝑉 𝐶
(𝑠)
𝑉 𝑖
( 𝑠)
La función de transferencia esta dada por:
𝑖
𝐶
𝐶
𝑖
(𝑡 )=𝑅
𝐶
( 𝑡 )
𝐶
𝑖
𝐶
𝐶
𝑖
𝐶
𝑖
𝑮 (^ 𝒔 )=
𝟏
( 𝝉 𝑺 + 𝟏 )
; τ=RC
𝑖
𝐶
𝐶
Haciendo una malla en el circuito tenemos
Reemplazamos el valor de Ic
Hacemos la transformada de Laplace
Despejando Vc(S)
𝑖
( (^) 𝑠 ) (^) − 𝑉 ¿ ¿ 𝐶 ( (^) 𝑠 ))=𝑉 𝐶
𝑪
( (^) 𝒔 ) (^) =
𝒊
( (^) 𝒔 ) (^) − 𝑽 ¿¿ 𝑪 ( (^) 𝒔 ))¿
Hallamos G(S)
𝑰 𝒄
( 𝒕 )
𝑮 ( 𝑺 )=
𝒃 𝒎
𝑺
𝒎
𝑺
𝒎 − 𝟏
𝑺 + 𝒃 𝟎
𝑺
𝒏
𝑺
𝒏 − 𝟏
𝑺 + 𝒂 𝟎
Ejemplo:
𝐺 (^ 𝑆 )=
2
𝑠
2
𝑛𝑢𝑚=[ 2 ]
𝑑𝑒𝑛=[ 1 3 4 ]
Solo los coeficientes de
s
clear all
clc
%ingresar parámetros
R=1;
C=1;
%calculamos "tao" 63.2%
t=R*C;
%se calcula función de transferencia
num=[1];
den=[t 1];
G=tf(num,den)
step(G)
grid on
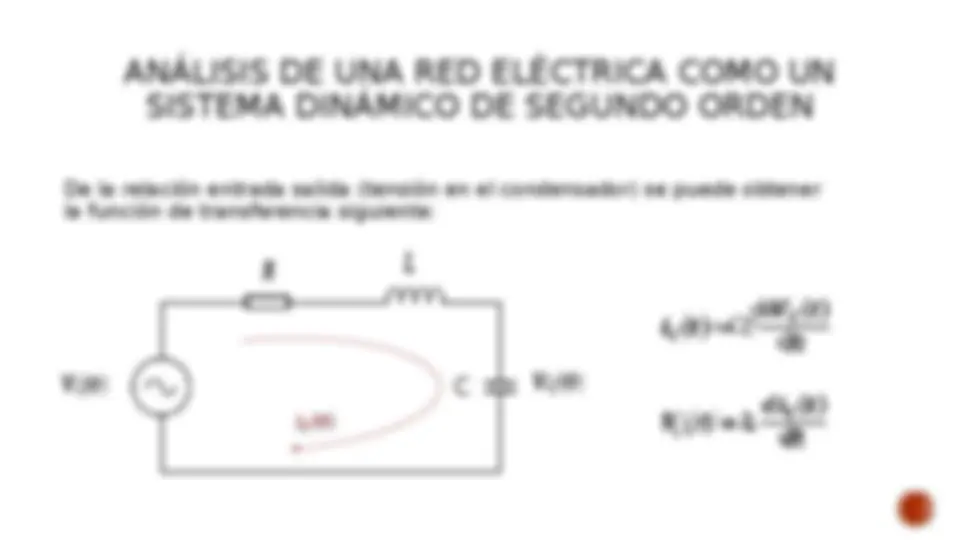
De la relación entrada salida (tensión en el condensador) se puede obtener
la función de transferencia siguiente:
𝑉 𝑖
(𝑡 )
𝑅
𝐿
C
𝑉 𝐶
(𝑡 )
𝐶
𝑖 𝐶
(𝑡 )=𝐶
𝑑 𝑉 𝐶
( 𝑡)
𝑑𝑡
𝑉 𝐿
( (^) 𝑡 )=𝐿
𝑑 𝑖 𝐶
(𝑡 )
𝑑𝑡
𝑖
𝐶
𝐿
𝐶
𝑖
(𝑡 )=𝑅 ∗ 𝐼 𝐶
( 𝑡) + 𝐿
𝐶
( 𝑡)
𝐶
𝑉 𝑖
𝐶
2 ∗ 𝑉 𝐶
𝐶
( 𝑠)
Haciendo una malla en el circuito tenemos
Reemplazamos el valor de VL
Hacemos la transformada de Laplace
𝑉 𝑖
(𝑡 )=𝑅 ∗ (
𝐶
𝑑 𝑉 𝐶
( (^) 𝑡 )
𝑑𝑡
)
𝑑 (
𝐶
𝑑 𝑉 𝐶
( (^) 𝑡 )
𝑑𝑡
)
𝑑𝑡
)+𝑉^ 𝐶 (^ 𝑡^ )
Reemplazamos el valor de ic
𝑖 𝐶
(𝑡 )=𝐶
𝑑 𝑉 𝐶
( 𝑡)
𝑑𝑡
𝑉 𝐿
( (^) 𝑡 )=𝐿
𝑑 𝑖 𝐶
(𝑡 )
𝑑𝑡
𝑖
(
𝐶
)
(
2 𝑉 𝐶
2 )
𝐶
El denominador de la función de transferencia tiene dos raíces
𝑟 1
, 𝑟 2
=
− 2 𝜁 𝜔 𝑛
± (^) √ 4 𝜁
2
𝜔 𝑛
2
− 4 𝜔 𝑛
2
2
Simplificamos el 2
𝑟 1
, 𝑟 2
= − 𝜁 𝜔 𝑛
± √
𝜁
2
𝜔 𝑛
2
− 𝜔 𝑛
2
𝒓 𝟏
, 𝒓 𝟐
= − 𝜻 𝝎 𝒏
± 𝒋 𝝎 𝒏
√ 𝟏^ −^ 𝜻
𝟐
Factorizamos
𝑟 1
, 𝑟 2
= − 𝜁 𝜔 𝑛
± √
− 𝜔 𝑛
2
∗( − 𝜁
2
Sacamos del radical teniendo en cuenta el signo negativo, sale imaginario (j)