



AJUSTE GEODÉSICO
Revisión 3.2
René Zepeda G.
septiembre 2016








































































Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
apuntes y ejercicios varios para estudio
Tipo: Apuntes
1 / 83

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
(en blanco)
AJUSTE GEODÉSICO
APUNTE PROVISORIO, SUJETO A REVISIÓN Y CAMBIOS, NO REEMPLAZAN ANOTACIONES EN CLASES LA PRESENTE REVISIÓN INCLUYE CORRECCIONES Y ACTUALIZACIONES RESPECTO A LA VERSIÓN 2004 OBSERVACIONES Y SUGERENCIAS FAVOR DIRIGIRLAS AL CORREO [email protected]
¿Por qué ajustar observaciones? Quien realiza análisis de mediciones comprende que “nunca se obtiene el verdadero valor de una magnitud medida”. Las mediciones se caracterizan por la presencia de errores de medición, no solo por falla humana si no que también por la imperfección de equipos e influencia de condiciones ambientales.
Cuando se solicita una medida de confianza, no se realiza solo una medición, llevando a la multiplicación de la observación. De allí se crea un nuevo problema: a partir de las varias observaciones con sus discrepancias asociadas, o sea, con datos redundantes, extraer un resultado que sea único y que represente con la mayor confianza el valor medido. El ajuste de observaciones trata esos problemas, también como la estimativa de la precisión de la solución.
En los casos más simples se realizan mediciones u observaciones (aquí sinónimos), sobre las propias magnitudes incógnitas (observaciones directas). Cuando tales incógnitas se ligan por ecuaciones de condición, el problema es menos sencillo. Otras veces se miden magnitudes que se vinculan a las incógnitas (o parámetros) a través de relaciones funcionales conocidas. En todos los casos se busca limpiar las observaciones de las inconsistencias, o mejor, ajustarlas a un modelo matemático y en ciertas condiciones puede contener imposiciones iniciales (constraints). Se pueden ponderar las observaciones, atribuyéndoles “más peso” a aquellas que merecen más confianza, es decir, supuestamente de mayor precisión.
Considérese el caso de una medida directa de una magnitud: l 1 , l 2 , l 3 , .... ln valores de una serie de “n” observaciones Como es imposible obtener el verdadero valor de x, se calcula una estimativa en que se pueda confiar. Sean las diferencias: x – l 1 = v 1 x – l 2 = v 2
x – ln = vn x – li = vi
vi son los residuos, a priori desconocidos, que sumados a las observaciones entregan el valor escogido x.
Se podría escoger un valor diferente x’, que resultaría un nuevo conjunto de residuos. x’ – li = v’i x” – li = v”i ¿cuál valor adoptar?
Se trata de escoger un criterio que permita, a partir de las observaciones repetidas li , extraer un valor único para representar la incógnita x.
Hace 2 siglos los matemáticos y geodestas Adrien Legendre (Francia, 1752-1833) y Carl Gauss (Alemania, 1777-1855) publicaron la teoría en 1805 y 1809, este último asociándola a la teoría de probabilidad y la distribución normal, de allí que esta teoría tenga también los créditos de Gauss:
Aceptar como mejor estimativa de x, el valor que torna mínima la suma de los cuadrados de los residuos
v mínimo
n
i
i 1
2
Cuando las observaciones no tienen el mismo grado de confianza, son homogeneizadas a través de los pesos pi :
n
i
i i 1
2
Este es el criterio que caracteriza el METODO DE MÍNIMOS CUADRADOS (MMC).
Error: diferencia entre la cantidad medida y el valor verdadero.
( xi xv )
Valor Más Probable-EMP: valor de una cantidad medida que, basada en las observaciones, tiene la más alta probabilidad. El EMP es obtenido, directamente de varias mediciones independientes, por su media aritmética.
Residuo: diferencia entre la cantidad medida y el valor más probable; este es el valor que se trata en el ajuste de observaciones. Este término es frecuentemente usado como sinónimo de error. vi ( xi )
Grados de Libertad: Es el número de mediciones en exceso, o sea, es el número observaciones menos el número de incógnitas, es el número de observaciones redundantes; hace posible el ajuste por mínimos cuadrados.
Varianza de la población. (^2 ) Expresa la precisión de un grupo de observaciones; es la media del cuadrado de los errores.
^
2 2
La varianza de la muestra es dada por:
2 2
Error Estándar: () Raíz de la varianza;
2
Desviación Estándar. Similar al Error Estándar; las cantidades ^2 y , son teóricas porque el valor verdadero es indeterminado. En la práctica se usan los residuos y una mejor estimativa de la varianza es usar residuos:
2
n
n-1: grados de libertad
Si n entonces ^2 = S^2
El ajuste de observaciones trata solo de errores aleatorios, o accidentales, presuponiendo que los errores sistemáticos han sido removidos. Probabilidad es la razón entre el número de veces que un evento puede ocurrir respecto del número total de posibilidades
y = f(x) representa la probabilidad (por unidad de intervalo de unidad medida) de obtener un determinado valor de esa medida, obviamente:
p =
f(x) dx = 1
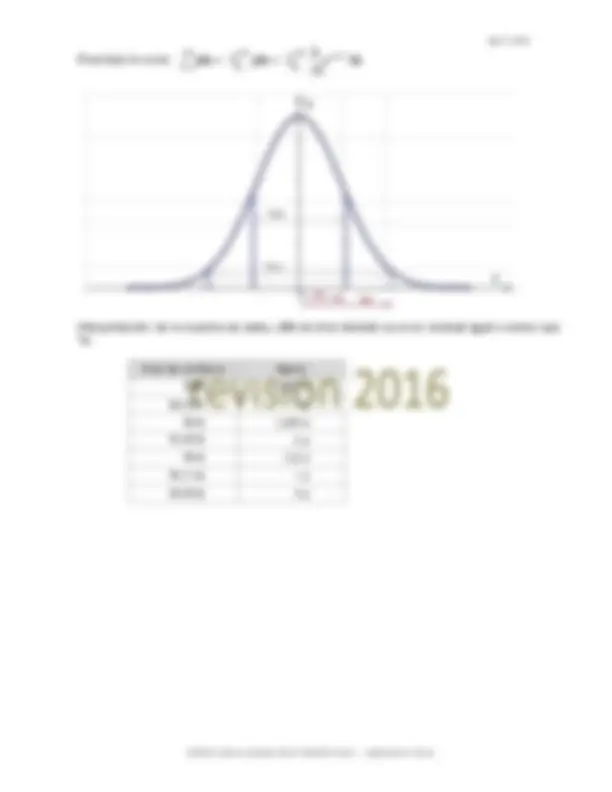
La ecuación de la curva de distribución normal es:
22
(xx)^2 e 2
1 y f(x)
y: probabilidad de ocurrencia del error entre x y dx e: base de logaritmo natural : desviación estándar
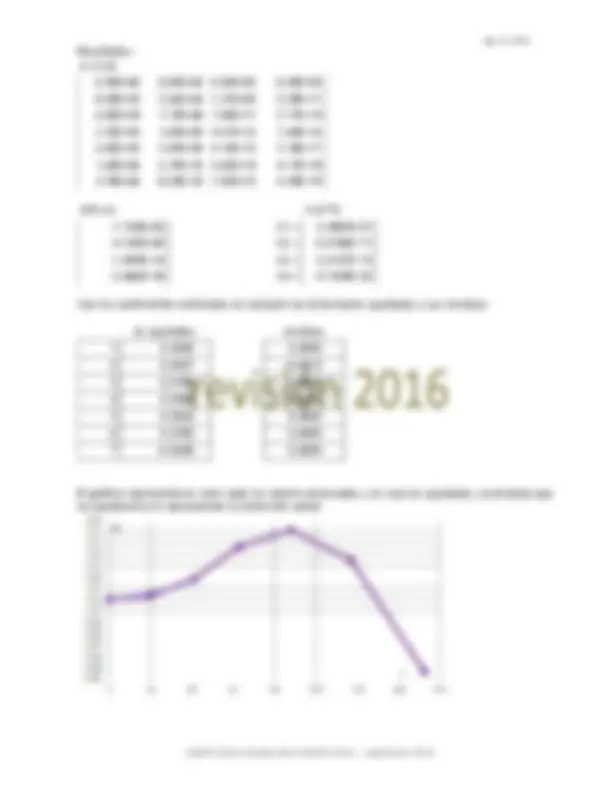
Histograma: es la representación gráfica de la distribución de un grupo de mediciones o de un grupo de residuos. Es un gráfico de barra de frecuencias.
Reemplazando: 2 2
2
x y e
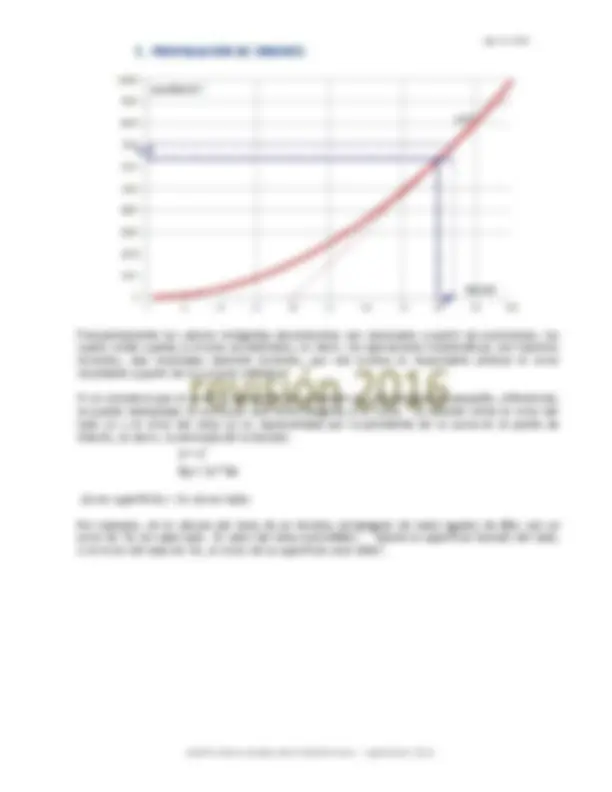
Frecuentemente los valores incógnitas desconocidos son calculados a partir de mediciones, las cuales están sujetas a errores accidentales, es decir, las operaciones matemáticas con números inciertos, dan resultados también inciertos, por ese motivo es importante estimar el error resultante a partir de los errores iniciales.
Si se considera que el error (o variación) de la función es suficientemente pequeño, diferencial, se puede reemplazar la curva por una recta tangente a la curva. La relación entre el error del lado (x) y el error del área (y) es representada por la pendiente de la curva en el punto de interés, es decir, la derivada de la función.
(error superficie) = 2x (error lado)
Por ejemplo, en el cálculo del área de un terreno rectangular de lados iguales de 80m con un error de 1m en cada lado. El valor del área será 6400m^2. Siendo la superficie función del lado, si el error del lado de 1m, el error de la superficie será 160m^2.
En la propagación de errores independientes, se presume según Gemael (1994) que los errores sistemáticos han sido eliminados.
Sean:
con x 1 , x 2 observaciones independientes con 1 y 2 desviaciones estándar, a 1 y a 2 constantes x 1 determinado a partir de n mediciones, cada una con un error 1 i ; x 2 determinado a partir de n mediciones, cada una con un error 2 i ;
Entonces zv es el valor verdadero de z para cada medición independiente: Zv = a 1 (xi 1 – i 1 ) + a 2 (xi 2 – i 2 ) = a 1 xi 1 + a 2 xi 2 – (a 1 i 1 + a 2 i 2 ) Zv = a 1 (xii 1 – ii 1 ) + a 2 (xii 2 – ii 2 ) = a 1 xii 1 + a 2 xii 2 – (a 1 ii 1 + a 2 ii 2 ) Zv = a 1 (xiii 1 – iii 1 ) + a 2 (xiii 2 – iii 2 ) = a 1 xiii 1 + a 2 xiii 2 – (a 1 iii 1 + a 2 iii 2 ) ............
los valores de z calculados a partir de cada observación serán: zi^ = a 1 xi 1 + a 2 xi 2 zii^ = a 1 xii 1 + a 2 xii 2 ziii^ = a 1 xiii 1 + a 2 xiii 2 ……….
Reemplazando las últimas en las anteriores, resultan los (n) errores de cada valor calculado: zi^ – zv= a 1 i 1 + a 2 i 2 zii^ – zv = a 1 ii 1 + a 2 ii 2 ziii^ – zv = a 1 iii 1 + a 2 iii 2
Recordando que:
2 (^2) , es decir:
n^2 = (a 1 i 1 )^2 + 2 a 1 a 2 i 1 i 2 + (a 2 ii 2 )^2 + (a 1 ii 1 )^2 + 2 a 1 a 2 ii 1 ii 2 + (a 2 ii 2 )^2 + ............. n veces
Factorizando: n^2 = a 12 (i 12 + ii 12 + ii 12 + ...) + a 22 (i 22 + ii 22 + ii 22 + ...) 2a 1 a 2 (i 1 i 2 + ii 1 ii 2 + iii 1 ii 2 + iii 1 iii 2 + ...)
Sumando:
^
2 2 2 2
1 1 2
2 2 1 1
2 2 Z
Los términos entre paréntesis son, por definición, respectivamente las varianzas y covarianzas x1^2 , x1x2 , x2^2
La covarianza muestra la interdependencia entre las dos variables x 1 y x 2.
La última ecuación puede ser rescrita como:
2 x 2
2 1 2 x 1 x 2 2
2 x 1
2 1
Si las observaciones (mediciones) “x” son no correlacionadas, es decir, estadísticamente independientes, sus covarianzas son todas cero (elementos fuera de la diagonal). De ese modo la ecuación queda:
xn
zm ... xn
z 2 xn
z 1
.. .. ...... ...
x 2
zm x 2
z 2 x 2
z 1
x 1
zm ...... x 1
z 2 x 1
z 1
·
0 ... 0
... ... ... ...
0 ... 0
0 ... 0
·
xn
zm ... x 2
zm x 1
zm
.. .. ...... ...
xn
z 2 x 2
z 2 x 1
z 2
xn
z 1 ...... x 2
z 1 x 1
z 1
2 xn
2 x 2
2 x 1 2 Z
Puede ser rescrita y resulta la expresión para la ley especial de propagación de varianzas, o LEY DE PROPAGACIÓN DE ERRORES DE MEDICIONES INDEPENDIENTES
2 2 2
2 1 1 2
(^) z x x xn xn
z .... x
z x
z
Las operaciones a que son sometidas las magnitudes medidas acarrearán errores en los resultados.
Sea: A = B1 + B2 + Bn, con Bi observaciones independientes, cada una con errores i
A 1 · B 1 ^2 1 ·B 2 ^2 ..... 1 ·Bn^2 2 2 2 A B 1 B 2 ...Bn
si los errores son iguales:
Sea: n
zn ... n
z 2 n
z 1 n
z 1 z 2 ... zn n
zi z
Sea “” el error de cada medición,
2 zn
2 z 3
2 z 2
2 (^2) z 1 z
por tratarse de mediciones de igual precisión: 1 = 2 = .... = n
(^22) 2 z
z
El error medio de la media se obtiene del error medio de una observación divido por la raíz del número de observaciones. Por ejemplo, es necesario hacer 4 observaciones para reducir el error a la mitad y 100 veces para reducirlo a 0,1 del original.
Ejemplo: nivelación trigonométrica topográfica Sean los siguientes datos de terreno con sus precisiones asociadas, estimar el error del desnivel H
H=Di*cosZ+hi-hj
Di = 425.000 m ±0.080 m Z (g)= 110.0000 g ±0.0030 g hi = 1.400 m ±0.010 m hj = 1.800 m ±0.010 m
(^2) hj
2 (^2) hi
2 (^2) z
2 (^2) Di
2
hj
hi
Di senz z
cosz Di
Dh
2 2 2 2 Dh
2 2 2 2 2 2 Dh
Usualmente los datos son medidos con diferentes grados de precisión, asociándoles diferentes confianzas o pesos. Peso es la ponderación relativa entre valores observados, cuando es comparado con otro valor; el peso estima o expresa la relativa confiabilidad de una observación.
Cuando las mediciones son correlacionadas, los pesos son relacionados al inverso de la matriz de covarianzas . Siendo los pesos relativos, varianzas y covarianzas son reemplazados por cofactores. Un cofactor es la relación entre la covarianza y una varianza de referencia :
o
ij qij
(^) (coeficiente de peso)
Matricialmente:
2 o
1 Q (^) (matriz cofactora o de coeficientes de peso)
De esa manera la matriz de pesos P (también denominada Q), es:
Para observaciones no correlacionadas, las covarianzas son cero, por lo tanto la matriz es diagonal:
1 o
o
2 x 2
o
2 x 1
o
n
0 ... 0
... ... ... ...
0 ... 0
0 ... 0
P
(^) … ………….. (^) 2 i
i
Sean “n” observaciones separadas en dos conjuntos “na” y “nb”, tal que n = na+nb Media conjunto a: za = (zai/na) Media conjunto b: zb = (zbi/nb) Haciendo na = pa y nb = pb (mientras mayor número de observaciones, más confiable es la observación, mayor peso)
i
i i
Por ejemplo, una distancia “d” es medida por dos grupos. El primero logró una media de 65,37m con 3 mediciones, el segundo calculó 65,32m con 10 mediciones. Por lo tanto la media ponderada debe ser:
Sea una línea de longitud “l”, con avances en distancia “d”, la desviación estándar por cada instalación del instrumento:
Número de instalaciones por línea N = l/d 12 = N ^2 = (l 1 /d) ^2 22 = N ^2 = (l 2 /d) ^2 n^2 = N ^2 = (ln/d) ^2
^2 : desviación estándar por instalación n^2 : desviación estándar de la línea
l = l 1 +l 2 +..+ln
Siendo el peso inversamente proporcional a la varianza y esta también lo es respecto a la línea; el peso de una línea nivelada es:
2 1
2 1
1
l
p d
pero los 2
d son todos proporcionalmente iguales, de esa forma
n
n 2
2 1
Los pesos en nivelación son inversamente proporcionales a sus longitudes y a su vez, la longitud es proporcional al número de instalaciones, por lo tanto, los pesos son inversamente proporcionales al número de instalaciones. De allí que las normas técnicas de la nivelación geométrica especifiquen las tolerancias respecto a √k, siendo k el desarrollo en kilómetros.
Sean 3 ángulos (a1, a2, a3) de un triángulo plano, que fueron medidos n1, n2 y n3 veces respectivamente por el mismo instrumento.
La media de cada ángulo es:
1 ^
(en este caso denota sumatoria)
Sea la desviación estándar cada ángulo medido, La varianza de la media es:
l 1
d d
A d
B
l 2
d d
C
l 1
d d
A d
B
l 2
d d
C
En ajuste los cálculos frecuentemente tienen grandes sistemas de ecuaciones lineales. El método matricial es útil para uso en computadores, sin embargo no es lo más fácil para resolver problemas “manualmente”. A veces existen sistemas de tamaño moderado que pueden ser resueltos sin computador. La eliminación gaussiana (o por Gauss), envuelve sucesivas eliminaciones de ecuaciones e incógnitas de un sistema de ecuaciones lineales.
n
2
1
El primer paso es eliminar la incógnita x1 y reducir el Nº de ecuaciones a (n–1). Esto se logra multiplicando la ecuación 1 (e 1 ) por (1/a11). El resultado será la ecuación (e1), que es multiplicada por (a21) y se restará a la ecuación (e2), que se denominará (e22). La ecuación (e1) es sucesivamente multiplicada por (a31) y restada a (e3), multiplicada por (a41) y restada a (e41), así con todas las ecuaciones. El resultado es un sistema de (n–1) ecuaciones, que contiene de x2 a xn incógnitas.
El método se repite a las (n–1) ecuaciones, hasta llegar a 1 ecuación con 1 incógnita. El procedimiento es calcular las incógnitas de las ecuaciones reducidas, llamada frecuentemente de “retro solución”.
Ejemplo:
2y1-3y2 5y3- 21 0 (e3)
y1 2y2 21 y3^1120 (e1)* 21 (e 1 *)
2y1-3y2 5y3- 21 0 (e3)
5y2- y3 0 (e2)-(e1)(-1) (e22)
y1 2y2 y3 0 (e1)* (e 1 *)
2
43 2
3
2
1 2
11 2
1
5y2- y3 0 (e2)-(e1)(-1) (e22)
y1 2y2 y3 0 (e1)* (e 1 *)
2
43 2
3
2
1 2
11 2
1
sistema de (n–1)=
sistema de (n–2)=
retro solución:
y3 (^1) de (e33)
Varios autores han creado refinamientos de la eliminación de Gauss