







Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
INGIENERIA DE CONTROL AUTOMATICO II
Tipo: Resúmenes
1 / 38

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
Especificaciones en el dominio de frecuencia.
Tipos de Compensación
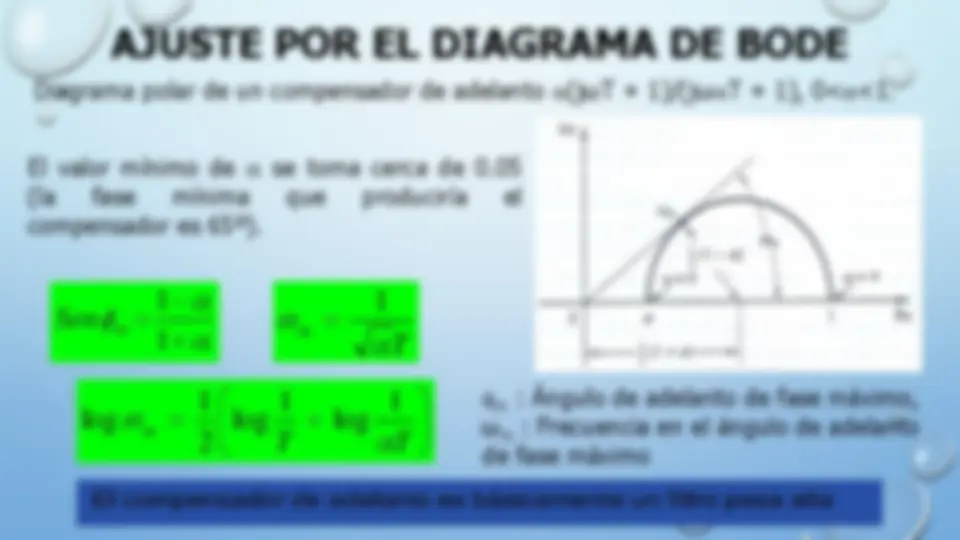
Diagrama polar de un compensador de adelanto (jωT + 1 )/(jωT + 1 ), 0 << 1. 1 1 m Sen T T m 1 log 1 log 2 1 log T m 1 m : Ángulo de adelanto de fase máximo, ω m : Frecuencia en el ángulo de adelanto de fase máximo El valor mínimo de se toma cerca de 0. 05 (la fase mínima que produciría el compensador es 65 º). AJUSTE POR EL DIAGRAMA DE BODE
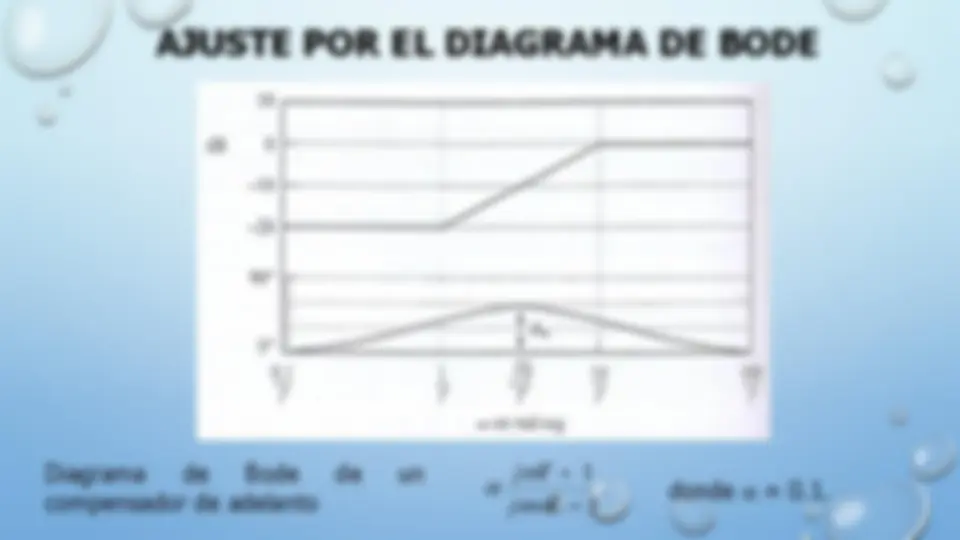
Diagrama de Bode de un compensador de adelanto , 1 1 j T j T donde = 0. 1. AJUSTE POR EL DIAGRAMA DE BODE
AJUSTE POR EL DIAGRAMA DE BODE
AJUSTE POR EL DIAGRAMA DE BODE
2 ) Se encuentra la ganancia K que junto con el sistema cumplan con la constante de error estático de velocidad. 𝐾𝑣 = lim 𝑠→ 0 𝑠𝐺𝑐 𝑠 𝐺 𝑠 = lim 𝑠→ 0
𝐾𝐺 𝑠 = lim 𝑠→ 0
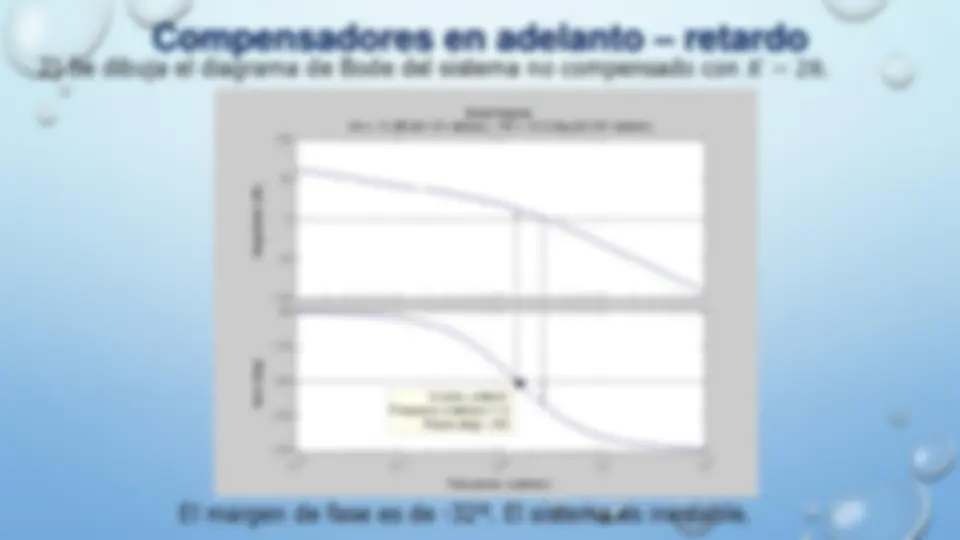
3 ) Se realiza el diagrama de Bode del sistema a compensar con la ganancia K. 𝐾𝐺 𝑠 =
Compensadores en adelanto
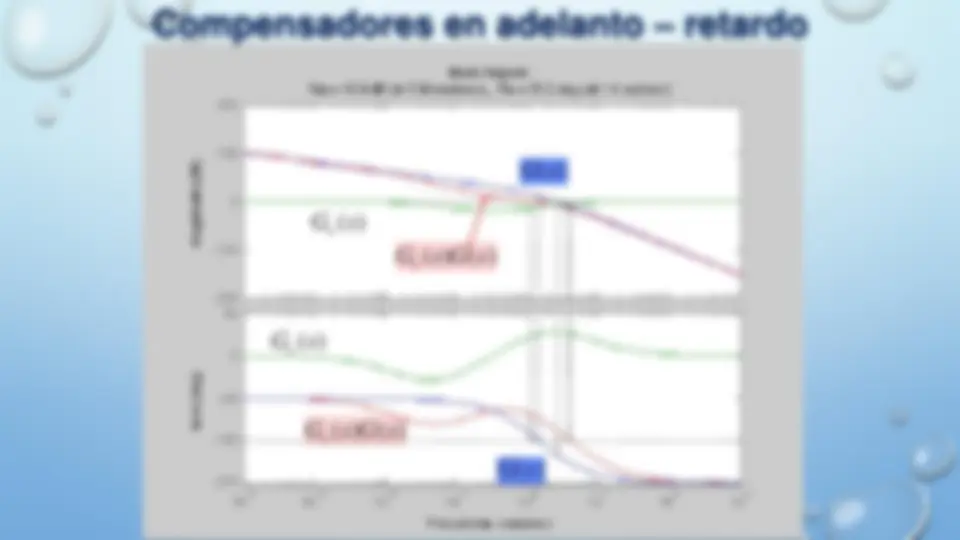
Diagrama de Bode Compensadores en adelanto
6 .- Se calcula el cambio de magnitud que se obtiene al agregar el compensador. Entonces: 20 log( (^) ൗ
) = 20 log( (^) ൗ
Se observa en el diagrama de Bode la frecuencia a la magnitud de − 20 log (^) ൗ 1 𝛼 y se define ésta como la nueva frecuencia de cruce de ganancia; siendo: 𝜔𝑐 = 9. 77 ൗ
A esta frecuencia debe ocurrir el máximo aumento de fase 𝜑𝑚. En otras palabra 𝜔𝑐 es la frecuencia media entre frecuencia de corte del cero y del polo. Compensadores en adelanto
Compensadores en adelanto 𝜔𝑚 =
7 .- Se obtiene el cero y el polo del compensador: 𝑐𝑒𝑟𝑜
8 .- Con 𝛼 y 𝐾 se obtiene la ganancia del compensador 𝐾𝑐 =
Y el compensador es: 𝐺𝑐 𝑠 = 22. 16
DISEÑO DE COMPENSADORES DE RETARDO DE FASE
Diagrama polar del compensador de retardo. Diagrama de Bode del compensador de retardo con K c = 1 y β =10.
PROCEDIMIENTO
C
C