¡Descarga Análisis de Sistemas en el Espacio de Estado: Repaso y Ejercicios de Control y más Resúmenes en PDF de Sistemas de Control solo en Docsity!
INGENIERÍA DE CONTROL
AUTOMÁTICO II
DR. FIDEL HUMBERTO ANDÍA GUZMÁN
- Ingeniería de Control Automático II es una asignatura de naturaleza teórico – práctica, corresponde al tipo de estudios específicos y tiene como propósito proporcionar a los estudiantes los conocimientos, necesarios para el manejo y aplicación para resolver problemas sobre la teoría moderna del espacio de estado para modelación, análisis y diseño de sistemas de control de tiempo continuo, desarrollando habilidades para la aplicación de las herramientas de diseño.
- La asignatura se desarrolla mediante las unidades de aprendizaje siguientes: I. Diseño de sistemas de control con realimentación convencional. II. Análisis de sistemas en el espacio de estado. III. Diseño de sistemas realimentados en el espacio de estado. IV. Introducción a sistemas de control no lineal.
Sumilla:
Del 28 de noviembre al 2 de
diciembre
Sistema Regulador. Diseño de controlador por asignación de
polos con realimentación de estado.
Tarea N° 3. Laboratorio N° 4.
10 Del 5 al 9 de diciembre
Diseño de Observadores de estado de orden completo y orden
reducido.
Paso escrito N° 4.
11 Del 12 al 16 de diciembre
Diseño de servosistemas. Diseño de controladores con
observador de estado.
Foro N° 4. Laboratorio N° 5.
12 Del de 19 al 23 de diciembre
Repaso 3 ° Unidad de Aprendizaje
( 3 º Práctica calificada)
13 Del 26 al 30 de diciembre
Sistema regulador óptimo cuadrático.
Tarea N° 4.
14 Del 2 al 6 de enero
Conceptos básicos de sistemas no lineales y propiedades
fundamentales. Principios de estabilidad y linealización.
Paso escrito N° 5. Foro N° 5.
15 Del 9 al 13 de enero
Repaso 4 ° Unidad de Aprendizaje.
( 4 º Práctica calificada)
16 Del de 16 al 20 de enero Segundo Examen Parcial
SISTEMA DE EVALUACIÓN
Evidencia de
conocimiento
(EC)
- Exámenes Parciales.
- Promedio de los 2 exámenes parciales: equivale al 50% de la nota final.
Evidencia de
Desempeño
(ED)
- Práctica calificada de aula (25%), Prácticas de Laboratorio (25%), Foros (25%) y,
Tareas y/o Pasos escritos (25%).
- Se promedia todo y equivale al 40% de la nota final.
Evidencia
Actitudinal
(EA)
- La forman: Asistencia y puntualidad (33,3%), Rapidez para ejecución de tareas
(33,3%) e Interés, desempeño y disciplina (33.3%).
- Se promedia todo y equivale al 10% de la nota final.
ACCIONES BÁSICAS DE CONTROL Y CONTROLADORES AUTOMÁTICOS INDUSTRIALES
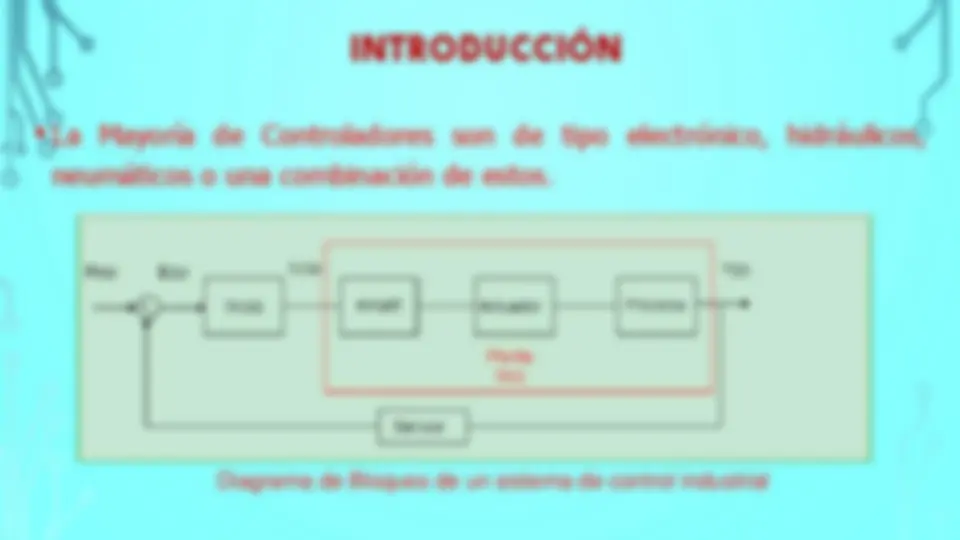
INTRODUCCIÓN
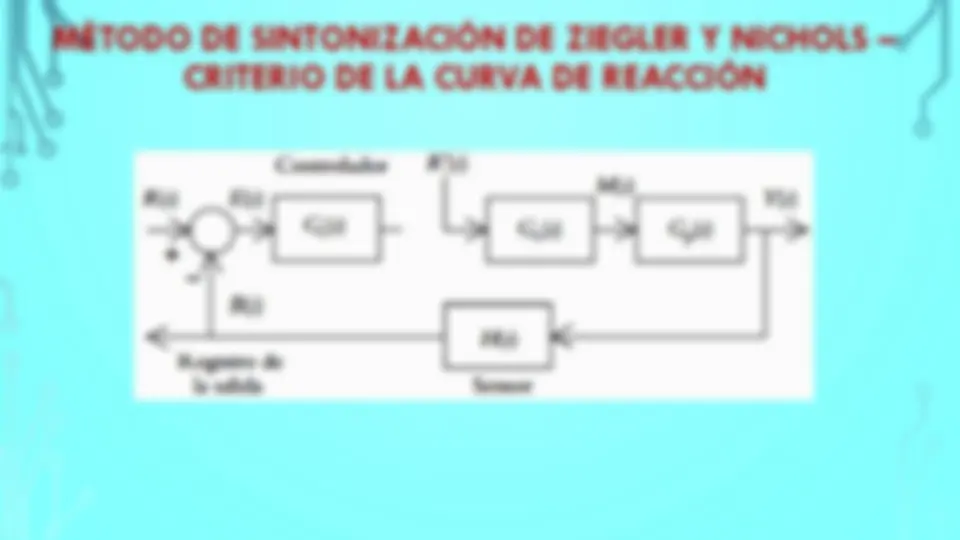
- La Mayoría de Controladores son de tipo electrónico, hidráulicos, neumáticos o una combinación de estos. Diagrama de Bloques de un sistema de control industrial
EL CONTROLADOR MEJORA LAS PRESTACIONES DEL SISTEMA, SUPONIÉNDOSE QUE:
- Reduce los efectos de variaciones en los parámetros del sistema.
- Reduce los efectos de perturbaciones.
- Reduce el error en estado estacionario
- Mejora la respuesta transitoria, haciendo que:
- El sistema responda más rápido a cambios en la señal de referencia r(t).
- La respuesta del sistema sea menos oscilantes.
- La respuesta transitoria tenga un menor sobreimpulso.
PIRÁMIDE DE LAS ACCIONES DE CONTROL LINEAL Acción de control proporcional (P) Acción de control proporcional-integral (PI) Acción de control proporcional- derivativo (PD) Acción de control proporcional-integral-derivativo (PID)
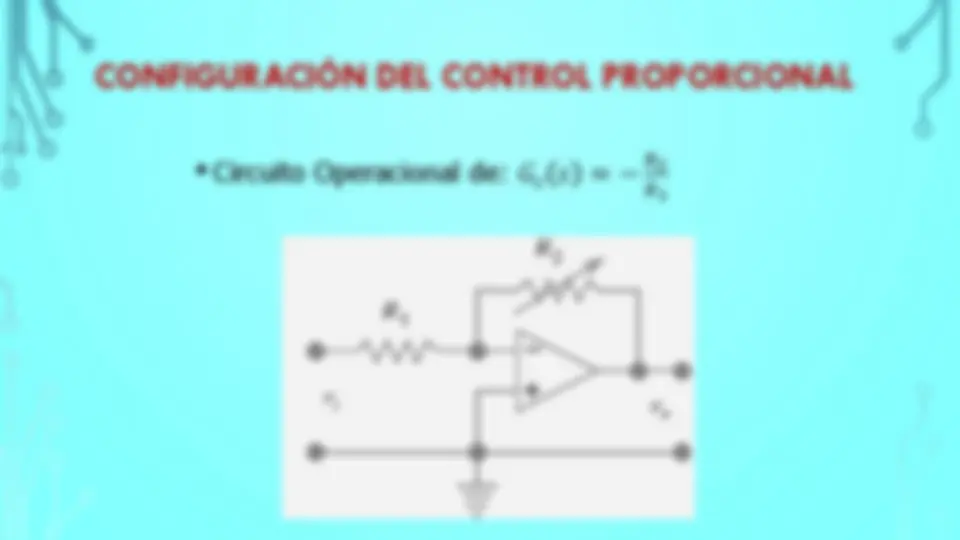
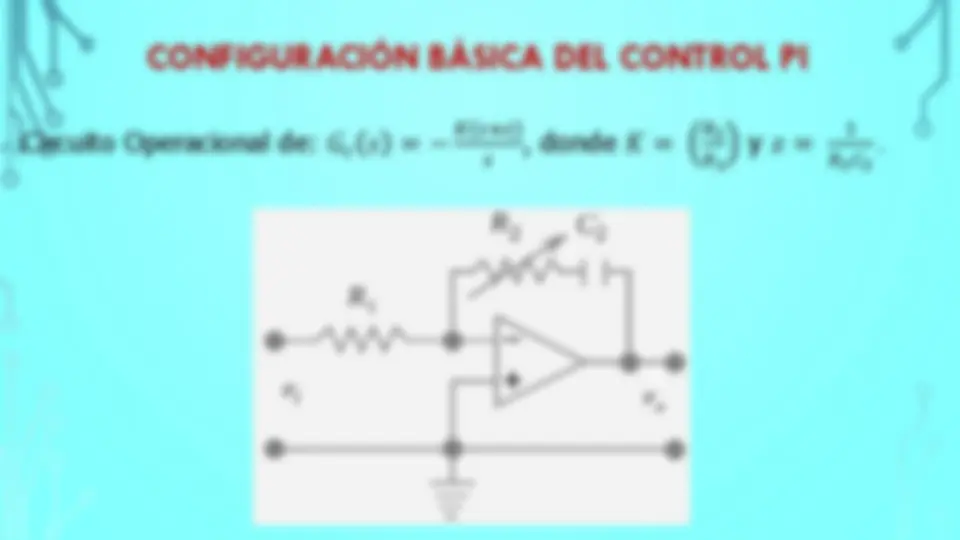
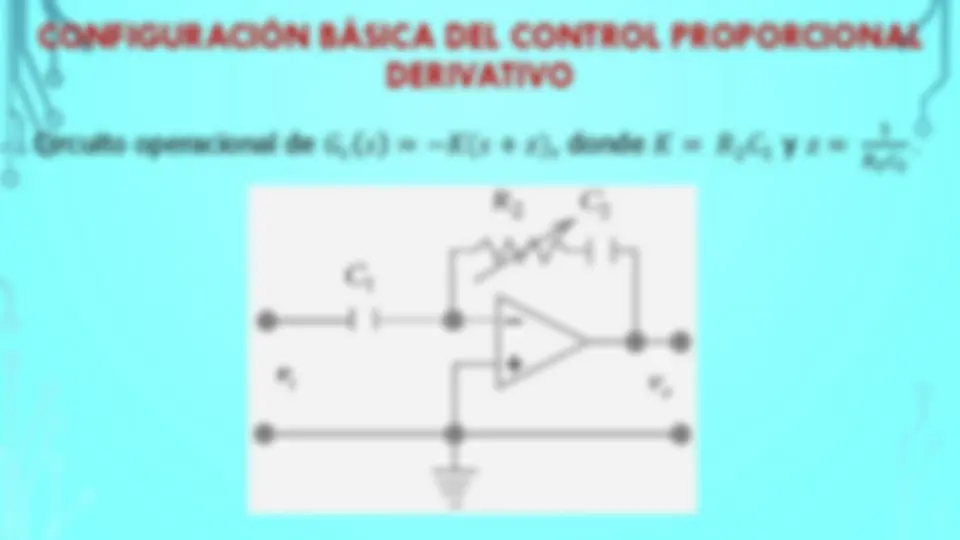
CONFIGURACIÓN DEL CONTROL PROPORCIONAL
- Circuito Operacional de: 𝐺
𝑠 = −
PRINCIPALES CARACTERÍSTICAS
- El tiempo de elevación experimenta una pequeña reducción.
- El máximo pico de sobreimpulso se incrementa.
- El amortiguamiento se reduce.
- El tiempo de asentamiento cambia en pequeña proporción.
- El error de estado estable disminuye con incrementos de ganancia.
- El tipo de sistema permanece igual.
CONFIGURACIÓN DEL CONTROL INTEGRAL Circuito Operacional: 𝐺
𝑠 = −
ACCIÓN DE CONTROL PROPORCIONAL-INTEGRAL La salida resulta: 𝑢 𝑡 = 𝐾𝑃𝑒 𝑡 + 𝐾𝑖 න 0 𝑡 𝑒 𝑡 𝑑𝑡 = 𝐾𝑃 𝑒 𝑡 + 𝐾𝑖 𝐾𝑃 න 0 𝑡 𝑒 𝑡 𝑑𝑡 = 𝐾𝑃 𝑒 𝑡 + 1 𝑇𝑖 න 0 𝑡 𝑒 𝑡 𝑑𝑡 Donde Ti se denomina tiempo integral. La función de transferencia es: 𝑈(𝑠) 𝐸(𝑠) = 𝐾𝑃 1 + ൗ 𝐾𝑖 𝐾𝑃 𝑠 = 𝐾𝑃 𝑠 + ൗ 𝐾𝑖 𝐾𝑃 𝑠 = 𝐾𝑃 𝑠 + (^) ൗ 1 𝑇𝑖 𝑠 Esta acción mejora la exactitud del sistema, más no la velocidad de respuesta y la estabilidad.
PRINCIPALES CARACTERÍSTICAS
- El amortiguamiento se reduce.
- El máximo pico de sobreimpulso se incrementa.
- Decrece el tiempo de elevación.
- Se mejoran los márgenes de ganancia y fase.
- El tipo de sistema se incrementa en una unidad.
- El error de estado estable mejora por el incremento del tipo de sistema.
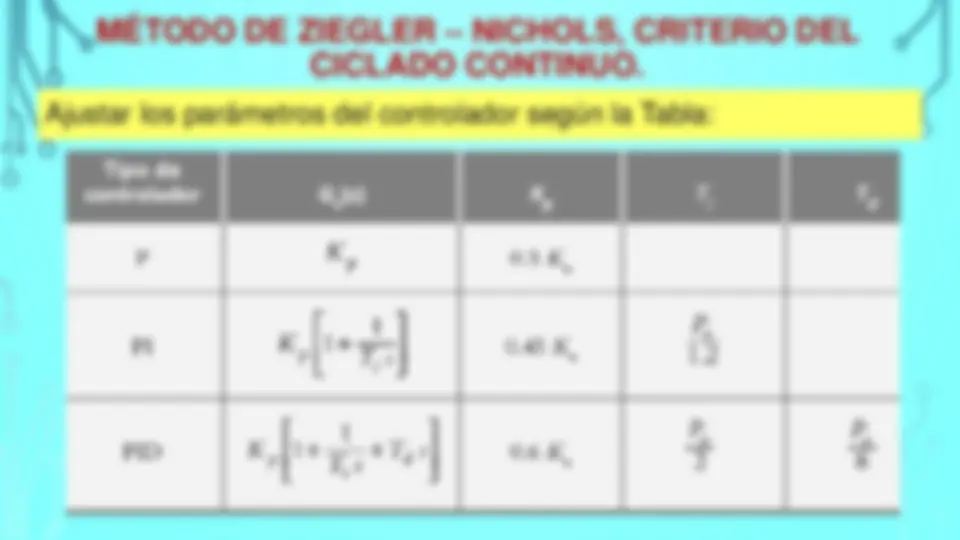
SINTONIZACIÓN DE CONTROLADORES PI.
- Dar valor elevado a T i (p.e. 100 minutos), el controlador PI se comporta como P.
- Ajustar Kp hasta obtener la forma de respuesta deseada, sin considerar el error e ss.
- Disminuir Ti hasta el mínimo posible que anule el e ss manteniendo la forma de respuesta deseada.
- Mínimo valor de Ti que no afecte el coeficiente de amortiguamiento.
Método
de
Prueba y
Error