


Intersección de superficies
Página 1
APUNTES DE
INTERSECCIÓN DE SUPERFICIES
UNIVERSIDAD DE LAS PALMAS DE GRAN CANARIA
ESCUELA UNIVERSITARIA POLITÉCNICA








































Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Teoría de geometría descriptiva sobre interseccion de superficies
Tipo: Apuntes
1 / 48

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
INTRODUCCIÓN Cuando dos superficies planas se intersectan lo hacen de forma que el resultado de la misma es una línea recta. Sin embargo, si la intersección se produce entre dos superficies curvas se obtendrá como resultado una línea común a ambas que no puede ser una recta, sino una curva bien sea abierta, cerrada, plana o alabeada. Si pensamos en los cuerpos tridimensionales vemos que la superficie de estos puede estar formada por una combinación de planos, por superficies curvas o por ambas a la vez, por lo tanto, la intersección de dos cuerpos cualesquiera dará como resultado una línea común a ambos que podrá adoptar cualquiera de las formas anteriores. A continuación se expondrán una serie de métodos para la determinación de estas líneas si bien cabe destacar que existen más métodos y que las posiciones que se elegirán para los cuerpos serán lo mas favorable posible, de forma que en muchos casos la solución será directa tal y como se verá. Dadas dos superficies S1 y S2, las cuales tienen una intersección entre sí, seccionaremos a ambas superficies con una superficie auxiliar Sa (generalmente un plano o esfera), de forma que las secciones L1 y L2 que dicha superficie produce en las dos anteriores se puedan obtener fácilmente. Estas secciones (L1, L2) nos ayudarán a localizar los puntos de intersección de las superficies que nos interesa (figura 1).
Sa
S
S
L1 L
i I
fig. 1
fig. 1.
1.3 Penetración tangencial: Este se podría entender como un caso particular de la penetración y se produce en aquella situación en que los sólidos presentan una tangencia en una de sus aristas o generatrices, por este motivo las líneas de entrada y salida tendrán un punto en común.
fig. 1.
1.4 Penetración máxima (doble Tangencia): Es otro caso de penetración tangencial aunque esta vez la tangencia se produce en dos costados del sólido penetrante con dos aristas o generatrices del otro. Figura 1.
fig. 1.
2 - CASOS PARTICULARES Vamos a desarrollar como casos particulares aquellas aquellos problemas en los que los cuerpos a estudiar se encuentran en posiciones particulares. No obstante cabe resaltar que cualquier caso general se podrá transformar en uno de estos casos simplemente realizando el “Cambio de Plano” correspondiente.
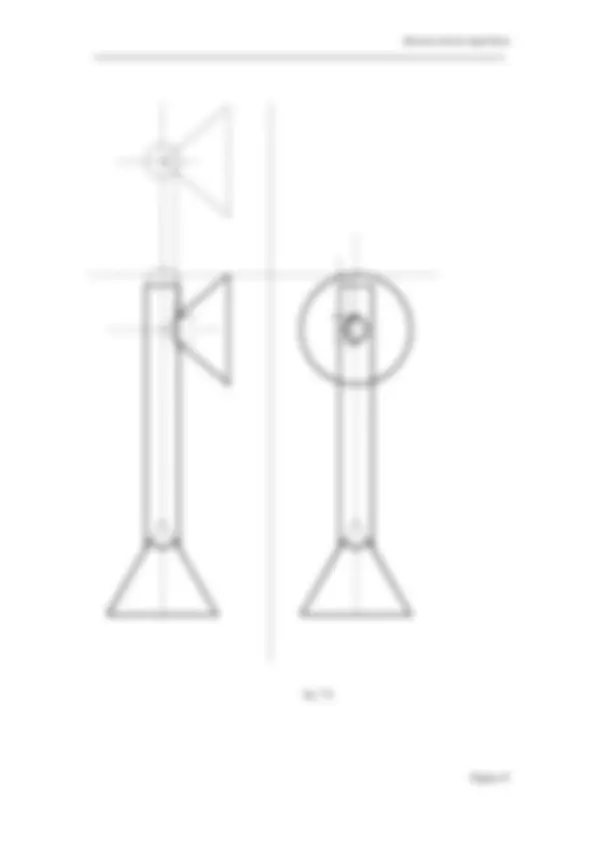
2.1 Prismas o Cilindros rectos: 2.1.1 Caso en que estos tienen sus aristas o generatrices perpendiculares al mismo plano de proyección. En este caso las líneas de intersección de los dos sólidos son “rectas paralelas a las generatrices o aristas de los mismos” y el problema se resuelve directamente en proyecciones obteniendo los puntos de contacto entre los contornos de las dos proyecciones de los objetos, proyectados sobre el plano al cual son perpendiculares, fig. 2.1.1.
aristas o generatrices, de aquel cuerpo que las presenta paralelas a uno de los planos de proyección, con planos paralelos a los de proyección para de esta forma determinar la intersección de las aristas del otro con estos planos. Es de resaltar que en la mayoría de las ocasiones es necesario apoyarse en la tercera proyección. A continuación se presentan dos problemas de este tipo resueltos. figuras 2.2.1, 2.3.1.
fig. 2.2.
fig. 2.2.2 – Vista en perspectiva
fig 2.3.
fig. 2.3.2 – Vista en perspectiva
En este segundo ejemplo inicialmente se ha subdividido el cilindro horizontal en un número determinado de generatrices mediante planos horizontales para posteriormente calcular la intersección de esas generatrices con la superficie del otro cilindro.
3 - MÉTODO DE PLANOS POR EL VÉRTICE En general su aplicación se extiende a intersecciones de pirámides y prismas pudiéndose aplicar a conos y cilindros aunque existe otro método (método de esferas concéntricas) que en ocasiones es más sencillo de utilizar para estos últimos. El método se fundamenta en utilizar planos que pasen por el vértice de uno de los cuerpos (paralelos a las aristas o generatrices para el caso de prismas o cilindros) y que a la vez corten a la base del cuerpo en cuestión, este plano generará dos aristas (generatrices) intersección. Si el plano utilizado pasa por los dos vértices de los cuerpos en estudio generará dos rectas intersección en cada uno de ellos las cuales se cortarán dando lugar a cuatro puntos de la intersección buscada. Repitiendo esta operación tantas veces como sea necesario se irá dando forma a la intersección buscada hasta determinarla. A continuación se muestra una representación espacial de lo comentado donde se pueden apreciar dos pirámides, cada una de ellas apoyada en un plano de proyección y oblicuas, y como se ven seccionadas por un plano que pasando por el vértice de ambas corta a sus bases.
fig. 3.0.
Plano límite
3.1 Planos Límite: Como se ha mencionado anteriormente los planos auxiliares utilizados deben cumplir dos condiciones, contener a los vértices y cortar a las bases, pues bien, de todos estos planos existen dos que cortando a una de las bases son tangentes a la otra, es decir, que cualquier plano a partir de estos límites puede que corten a una de las bases pero no a la otra, de ahí el nombre que reciben. En la figura anterior se muestra uno de estos planos límite.
3.2 Determinación de una intersección por el método de planos por el vértice
1º) Se deben determinar inicialmente los planos límite para saber con qué margen de planos jugamos y de esta forma seleccionar los más idóneos.
2º) Según la disposición de estos planos límite se puede ver qué tipo de intersección es la que vamos a resolver: Mordedura, Penetración, Tangencia simple, Tangencia doble (ver apartado 4), para de esta forma tener una idea de como debe quedar la línea intersección.
3º) Finalmente pasamos a la determinación de los puntos de la intersección tomando como plano de partida uno de los límite y siguiendo, de forma ordenada, bien sea en sentido horario o antihorario. Hay que tener especial cuidado a la hora de nombrar los puntos obtenidos para evitar confusión puesto que como hemos visto hasta el momento, se generarán una gran cantidad de puntos.
3.3 Particularización del método según sea el caso
3.3.1 Ambos tienen sus bases apoyadas en el Plano Horizontal.
a ) Modelos: PRISMA - PRISMA PRISMA - CILINDRO
3.3.2 Uno tiene su base en el Plano Horizontal y el otro en el Vertical.
a) Modelos: PRISMA - PRISMA CILINDRO - CILINDRO PRISMA – CILINDRO
En primer lugar debemos definir el plano tipo para las intersecciones de la siguiente forma. Por un punto cualquiera P pasaremos dos rectas, cada una de ellas paralela a una de las generatrices (aristas) de los cuerpos que intervienen, de forma que al cortarse ambas en el punto P definirán un plano.
Los planos auxiliares deberán ser paralelos al anterior.
Calcularemos los planos límite y tendremos definida la gama de planos que podremos utilizar de la forma en que se vio en la pregunta anterior.
b) Modelos: PIRÁMIDE - PRISMA PIRÁMIDE - CILINDRO CONO - PRISMA CONO – CILINDRO
c) Modelos: CONO - CONO CONO - PIRÁMIDE PIRÁMIDE – PIRÁMIDE
Debemos pasar una recta por los vértices de los cuerpos implicados y localizar las trazas de la misma.
Los planos auxiliares deben contener a esta recta y cortar las bases de ambos cuerpos.
4 - DETERMINACIÓN DEL TIPO DE INTERSECCIÓN EN FUNCIÓN DE LOS PLANOS LÍMITE
Como hemos visto hasta el momento existen cuatro tipos de intersección de superficies, a saber, mordedura, penetración, tangencia simple y tangencia doble. Una vez localizados los planos límite y en función de cómo sean estos podremos determinar que tipo de intersección vamos a calcular antes de iniciar el proceso. A continuación se exponen unos gráficos orientativos de cómo resultarían estos planos en función del tipo de intersección. Lo que se muestra es la posición relativa de las trazas de los planos límite y las bases de los cuerpos.
4.1 Penetración:
Los planos límites de una de las directrices no tienen ningún punto de contacto con los de la otra.
4.4 Tangencia Doble:
Los planos límite son comunes a las dos directrices.
fig. 4.4.
5 - EJEMPLOS A continuación se presenta la resolución de dos ejercicios por el método de planos por el vértice.
a) Intersección de cono y pirámide, ambos apoyados en el Plano horizontal de proyección:
a 1
b 1
fig. 5.0.
Este proceso habría que repetirlo tantas veces como fuera necesario para definir la intersección de forma clara.
fig. 5.0.
Como se puede observar se obtiene una gran cantidad de puntos y aristas por lo que necesitamos de algún procedimiento que nos sirva de ayuda a la hora de conectar los puntos. El que se muestra a continuación puede servir como ejemplo: Nombramos todas las aristas ficticias generadas por la intersección de los planos seccionantes de alguna forma, en el ejemplo se han nombrado en mayúscula las de la pirámide y con números las del cono. Una vez hemos hecho esto y con la ayuda de un grafo de circulación como el que se muestra en la figura 5.0.4, vamos localizando los puntos intersección uno a uno y los nombramos (se han nombrado en minúsculas).
BA D C
E
F
G
H
21 4 3 5
(^76)
8
9 I b a
dc
e f g h (^) i j kl
on m p
fig. 5.0. Nota : Es importante que la circulación en las dos bases sea en el mismo sentido.
A partir de este grafo se obtiene la siguiente tabla de relaciones:
V1 A B C D E F G F E D C B A
V2^4 3 2 1 2 3 4 5 6 7 6 5
I a b c d e F g h Y j k l m
En esta tabla se encuentran todas las intersecciones generadas por las distintas aristas ficticias, a estas intersecciones se las ha nombrado en letra minúscula para posteriormente poder identificarlas en la representación diédrica. Para el caso que nos ocupa la tabla de intersecciones quedará de la siguiente forma:
V1 D E F G H I A B C B A I H G
V2^5 6 7 8 9 8 7 6 5 4 3 2 1
I a b c d e f G h y j k l m n
V1 F E D
V2^3 4
I o p a
C D
E
F
G
1
2
3
4 5 6 7 Mordedura