¡Descarga laboratorio control automatico y más Apuntes en PDF de Competencias en Matlab solo en Docsity!
INFORME LABORATORIO Nº
Acciones de control PID
NOMBRE: Nicolás Vives/ Raúl Muñoz CARRERA: Ingeniería en Automatización y control Industrial ASIGNATURA: Laboratorio Control Automático PROFESOR: Sergio Oses Mellado FECHA: 11/11/
LABORATORIO
CONTROL
AUTOMATICO
Introducción
En el presente informe abordaremos el tipo de control PID, es decir, proporcional, integral y derivativo. Iniciando con un resumen conciso referente a la teoría de este tipo de control y su función matemática; siguiendo con la implementación de un modelo de simulación en Matlab (simulink) para observar la salida de cada una de las acciones. A demás modificaremos la función de transferencia para ver los comportamientos en los diversos ordenes (primero, segundo y superior), modificaremos los valores de ajuste, observaremos la salida del sistema con y sin perturbaciones y modificaremos los parámetros de control para tratar de alcanzar el error cero.
A lo largo del informe nos encontraremos con imágenes donde se grafican los diversos comportamientos, según el tipo de orden, controlador y ajuste de parámetro a utilizar, realizando comparaciones entre éstos, haciendo de éste informe, uno muy didáctico e ilustrativo.
Controlador PID
Actividad
A. Implementar modelo de simulación en Matlab para observar la salida de Bloque P, I, D, PI, PD, PID para una entrada escalón.
Usaremos esta implementación en el Matlab para posteriormente observar la salida en el Scope. Como se podrá dar cuenta, hemos puesto un controlador PID, ya que este tipo de controlador nos permite trabajar con cada una de las acciones en conjunto o separadas. Eso se logra haciendo doble clic en el controlador para entrar al menú.
Luego de haber hecho doble clic en el controlador, nos aparece la imagen anterior, donde podremos modificar las distintas acciones (P, I, D) según sea necesario.
A continuación, se mostrará el comportamiento de cada acción.
Proporcional (P)
En la siguiente acción de control podemos ver reflejado el comportamiento proporcional de la señal, que corresponde a un escalón.
Integrativo (I)
La señal posee una pendiente ascendente, en el segundo 2 intercepta la consigna.
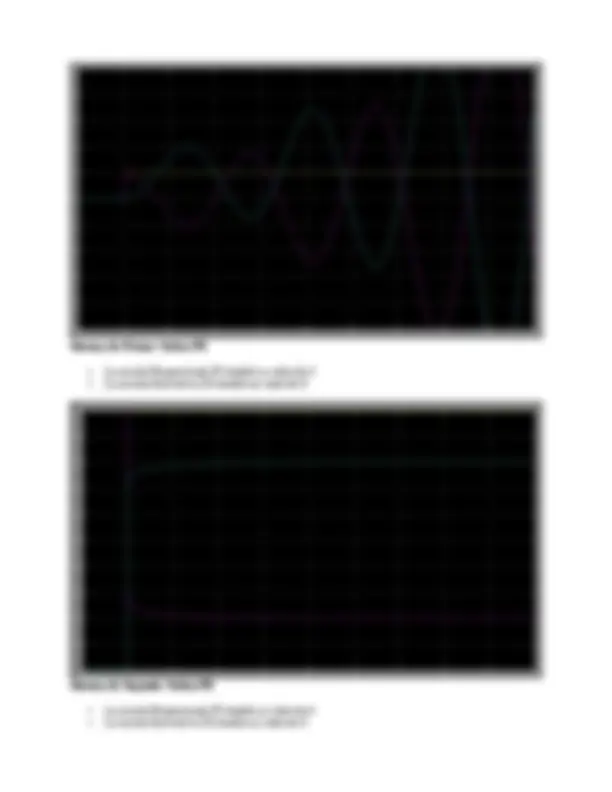
Proporcional Integrativo (PI)
En este último grafico vemos reflejado el comportamiento de una acción de control proporcional, integrativo y derivativo (PID) donde se puede apreciar al igual que en las imágenes anteriores como existe una señal escalón, luego una señal sinusoidal punzante y finalmente la pendiente ascendente de la acción integrativa.
B. Simular lazo de control PID según corresponda para sistemas de primer orden, segundo orden y orden superior.
Para sistemas de primer orden usaremos la siguiente función de transferencia:
Para sistemas de segundo orden usaremos la siguiente función de transferencia:
Para los sistemas de Orden superior usaremos la siguiente función de transferencia:
Sistemas de Primer Orden P
En este gráfico nos podemos dar cuenta de que nuestra señal no llega al SP y el error no tiende a 0. Por lo tanto, nuestra respuesta no es la deseada. Sin embargo, esta se estabiliza a los 5 segundos, con una respuesta de 0,5. Como conclusión este sistema no asegura el error 0. Por lo tanto, la señal es inestable.
Sistema de Primer Orden PI
En este gráfico de la acción PI nos podemos dar cuenta de que nuestra señal es estable, sin embargo, comparado a la acción P, se demora un poco más en llegar a la estabilización de la señal, ya que se estabiliza en 8 segundos. Pero en este caso si se logra la respuesta deseada y el error tiende a 0. Por lo tanto, la señal es estable.
Sistema de Primer Orden PD
En esta acción PD, la estabilización de la señal es más rápida, demorándose tan solo 2 segundos. Sin embargo, al igual que la acción P, el error no tiende a 0 y la respuesta no es la deseada, por lo tanto, la señal es inestable.
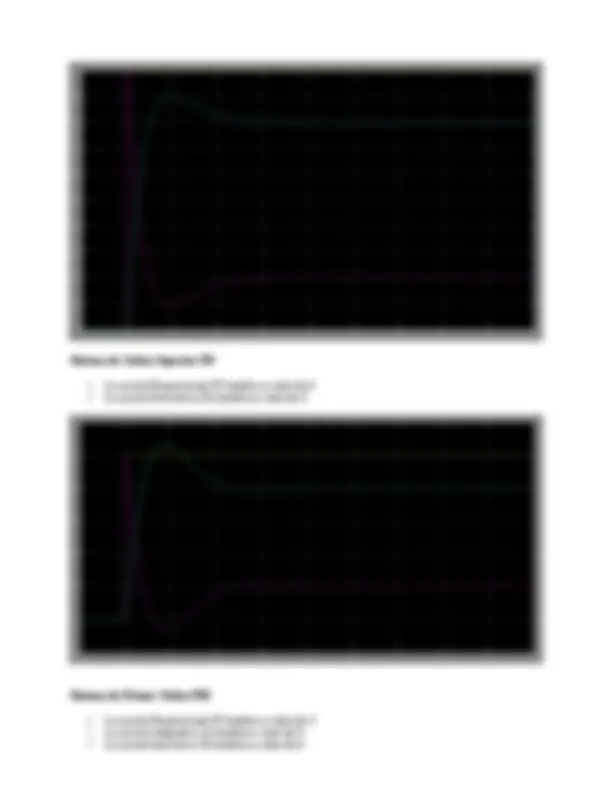
Sistema de Primer Orden PID
En este gráfico de la acción PID, podemos darnos cuenta que la señal primeramente busca estabilizarse en una respuesta no deseada de 0,5. Sin embargo, la señal tiende llegar a la señal deseada 1, y el error tiende a
- Provocando una señal senoidal y una estabilidad en el tiempo, sin embargo, su estabilidad se demora mucho más que las acciones anteriores. La señal es estable.
Sistema de Segundo Orden P
En este grafico observamos que la señal de respuesta junto con la del error se tienden a estabilizar pasado los 10 segundos en el valor deseado.
C. Observar la salida del sistema (B) para diferentes valores de ajuste (P, PI, PD, PID)
Sistema de Primer Orden P
- La acción Proporcional P tendrá un valor de 3
Al modificar varias veces el valor de P nos pudimos dar cuenta que mientras más grande sea el valor que le asignemos a P más cercano al set point es la señal de respuesta.
Sistema de Segundo Orden P
- La acción Proporcional (P) tendrá un valor de 3
Sistema de Orden Superior P
- La acción Proporcional (P) tendrá un valor de 3
Sistema de Primer Orden PD
- La acción Proporcional (P) tendrá un valor de 4
- La acción Derivativa (D) tendrá un valor de 3
Sistema de Segundo Orden PD
- La acción Proporcional (P) tendrá un valor de 4
- La acción Derivativa (D) tendrá un valor de 3
Sistema de Orden Superior PD
- La acción Proporcional (P) tendrá un valor de 4
- La acción Derivativa (D) tendrá un valor de 3
Sistema de Primer Orden PID
- La acción Proporcional (P) tendrá un valor de 4
- La acción Integrativa (I) tendrá un valor de 3
- La acción derivativa (D) tendrá un valor de 3
E. Observar la salida del sistema con y sin perturbaciones posteriormente compare el comportamiento en cada caso.
Usaremos el siguiente sistema en Matlab simulink agregándole la perturbación con Random Number. Se aplicará este sistema de control a todas las acciones para ver las señales de respuesta y error en cada acción.
Sistema de Segundo Orden P Sin perturbación
Sistema de Segundo Orden P Con perturbación.
Sistema de Segundo Orden PI Sin perturbación
Sistema de Segundo Orden PI Con perturbación
Sistema de Segundo Orden PD Sin perturbación
F. Ajustar los parámetros de control para cada caso, con el fin de eliminar el error permanente del sistema.
Sistema de Segundo Orden P
Usaremos el siguiente sistema en Matlab simulink agregándole la perturbación con Random Number.
Para hacer el error cero en la acción PI debemos modificar el parámetro, para que el error tienda a 0.
Al probar cada valor dado al parámetro nos fuimos dando cuenta que mientras más alto era el valor del parámetro, más cerca del 0 estaba el error, al llegar al valor de 250 de la acción Proporcional, nos pudimos dar cuenta que es su máxima aproximación a 0. Quedando la gráfica de la siguiente manera:
Conclusión
Una vez terminado este excelente informe, nos vemos beneficiados al saber más del control PID y de cada una de sus acciones. Antes de saber el comportamiento de cada una de las acciones del control PID, aprendimos su teoría. Lo que es importante para saber el porqué de su funcionamiento.
Tuvimos la oportunidad de seguir aprendiendo a usar MATLAB y saber simular un control P, PI, PD, y PID. Y poder visualizar su comportamiento en Primer Orden, Segundo Orden y Orden Superior.
También pudimos ver las diferencias que se provoca en estas acciones al modificar sus parámetros, o al adquirirle una perturbación. Comparar cada una de las gráficas y sacar conclusiones propias.
Y finalmente, saber cómo eliminar esta perturbación, y hacer el error cero, con la modificación de los parámetros de la acción determinada.
Un trabajo completo para entender cómo funcionan estos tipos de control, de forma más práctica.