


Asignaci´on directa Asignaci´on ´optima
Reguladores ´optimos de tiempo continuo
PhD. Carlos Felipe Rengifo - Wilber Acu˜na-Bravo
Departamento de electr´onica, instrumentaci´on y control







Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Asignatura: control, Profesor: Wilber Acuña, Carrera: Biomedicina, Universidad: UFV
Tipo: Apuntes
1 / 22

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
PhD. Carlos Felipe Rengifo - Wilber Acu˜na-Bravo
Departamento de electr´onica, instrumentaci´on y control
(^1) Asignaci´on directa
2 Asignaci´on ´optima
x ˙(t) = (A − BK ) , x(t)
Asignaci´on de valores propios de lazo cerrado Si el sistema de lazo abierto es controlable, entonces existe un K que permite fijar los valores de A − BK en ubicaciones deseadas (semiplano izquierdo abierto).
Los valores propios de lazo cerrado son los λ (reales o complejos), que satisfacen la siguiente ecuaci´on:
det (λ I − A + B K ) = 0 As´ı, los valores propios de lazo cerrado quedan expresados en funci´on de los componentes del vector K.
Ejemplo
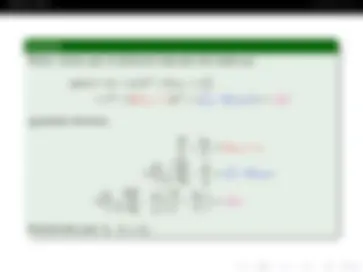
El sistema en lazo cerrado es ˙x = (A − BK )x:
δ x˙ δ v˙ δ I˙m
g x 0 −^2
cg mx − k L^1 − k L^2 − RL − k L^3
δx δv δIm
el polinomio caracter´ıstico est´a dado por:
pa(s) = s^3 +
k 3 L
s^2 +
k 2 L
cg mx
g x
s+
k 1 L
cg mx
g x
k 3 L
Ejemplo
Ahora, asuma que el polinomio deseado est´a dado por:
pd (s) = (s + α)
s^2 + 2ζωn + ω n^2
= s^3 + (2ζωn + α)s^2 +
ω^2 n + 2ζωnα
s + ω^2 n α
igualando t´erminos,
R L
k 3 L
= 2ζωn + α
k 2 L
cg mx
g x = ω n^2 + 2ζωnα
k 1 L
cg mx
g x
k 3 L
= ω n^2 α,
Resolviendo para k 1 , k 2 y k 3...
La multiplicidad de los polos de lazo cerrado no puede ser mayor que el n´umero de entradas al sistema. Es decir, en sistemas SISO la multiplicidad debe de los polos debe ser uno.
1 % Continuous time double integrator 2 A = [0 ,1; 0 , 0]; 3 B = [0; 1]; 4 C = [1 0]; 5 % Desired closed loop poles 6 Poles = [ -1; -1]; 7 % Gain 8 K = place (A ,B , Poles );
Error using place (line 79) The place command cannot place poles with multiplicity greater than rank(B).
(^1) Asignaci´on directa
2 Asignaci´on ´optima
Si Q = I y R = I son matrices identidad, el funcional se convierte en:
J(u) =
0
x 12 + x 22 + · · · + x n^2 + u^21 + · · · + u^2 m dt
0
x 12 + x 22 + · · · + x n^2 dt +
0
u^2 dt
∑^ n
i=
0
x i^2 dt ︸ ︷︷ ︸ energ´ıa xi
∑^ m
i=
0
u^2 i dt ︸ ︷︷ ︸ energ´ıa ui
Lo anterior significa que se busca encontrar una ley de control u = −L x que minimice la energ´ıa asociada a cada estado y a cada componente de la ley de control.
Si Q y R son matrices diagonales: Q = diag(q 1 , q 2 ,... , qn) y R = diag(r 1 , r 2 ,... , rm), entonces J(u) es una suma ponderada de energ´ıas:
J(u) =
∑^ n
i=
qi
0
x i^2 dt ︸ ︷︷ ︸ energ´ıa xi
∑^ m
i=
ri
0
u^2 i dt ︸ ︷︷ ︸ energ´ıa ui Si por ejemplo, q 1 = 10 q 2 , la minimizaci´on de J(u) conducir´a a que la trayectoria de x 1 sea mucho m´as cercana a cero que la de x 2 (las desviaciones de x 1 con respecto a cero son m´as costosas que las de x 2
Condiciones: El par (A, B) debe ser estabilizable. R > 0 y Q ≥ 0. El espacio observable del par (Q, A) debe incluir al eje imaginario.
Sistema no controlable pero estabilizable:
x˙ 1 = −x 1 x ˙ 2 = 2 x 2 + u
Sistema no controlable y no estabilizable:
x˙ 1 = x 1 x ˙ 2 = 2 x 2 + u
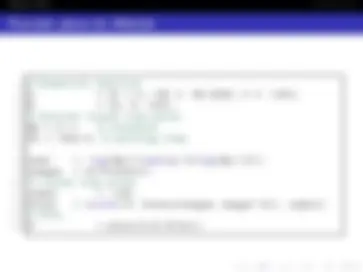
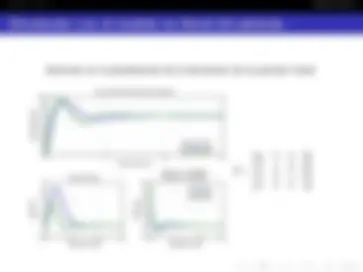
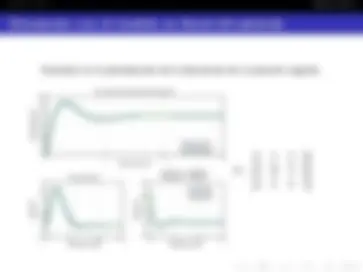
1 % Continuous time double integrator 2 A = [0 , 1; 0 , 0]; 3 B = [0; 1]; 4 % Desired closed loop poles 5 [ L1 , S1 , E1 ] = lqr (A ,B , eye (2) ,0.1); 6 [ L2 , S2 , E2 ] = lqr (A ,B , eye (2) ,10); 7 % Simulation 8 Model1 = ss (A - B * L1 ,B , eye ( size ( A )) ,0); 9 Model2 = ss (A - B * L2 ,B , eye ( size ( A )) ,0); 10 initial ( Model1 , Model2 ,[10;10]); 11 legend ( ’R =0.1 ’ , ’R =10 ’ );
x
y 0
x 0
y 1
θ x 1
y (^2) x 2
El objetivo es mantener el p´endulo en θ = 90o^ aplicando una fuerza u(t) a la base del carro.
M + m −m α L sin θ
−m α L sin θ m α^2 L^2 + J
A(q)
¨x
θ^ ¨
¨q
−m α L cos θ θ˙^2
m α L g cos θ
H(q, q˙)
Par´ametro S´ımbolo Valor Unidades Masa del carro M 1. 000 kg Masa del p´endulo m 0. 100 kg Inercia del p´endulo J 0. 025 kg − m^2 Longitud del p´endulo L 0. 500 m Centro de masa del p´endulo ( %) a 0. 500 Adimensional