¡Descarga Simulación del Motor Stirling por el Método LHA y más Tesis en PDF de Física solo en Docsity!
Proyecto Fin de Carrera
Ingeniería Industrial
SIMULACIÓN DEL MOTOR STIRLING POR EL
MÉTODO LHA
Autor
ANTONIO SANZ MORENO
Director
MARIANO MUÑOZ RODRIGUEZ
EINA / Área de Máquinas y Motores Térmicos JUNIO 2012
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Repositorio Universidad de Zaragoza
Tabla de contenidos
Simulación del Motor Stirling por el Método LHA
1 INTRODUCCIÓN
El desarrollo de este Proyecto Fin de Carrera se ha llevado a cabo dentro del área de Máquinas y Motores Térmicos de la EINA, que dispone de dos motores Stirling (Motor Solo y Motor LDT), los cuales han sido objeto de estudio y fuente de datos durante la realización del proyecto.
El objetivo principal de este proyecto es doble. Primero se va a modelar el ciclo de Stirling utilizando un método que refleje correctamente los procesos que tienen lugar en el motor. Por otra parte y a partir de este modelado se va a diseñar un programa informático que permita simular motores Stirling. Como objetivos secundarios se pretende que este programa permita obtener los resultados numéricos y gráficos más importantes que definen el comportamiento de un motor Stirling. Otro de los objetivos secundarios es conseguir una interacción fluida entre usuario y programa en la introducción de datos de entrada y del mismo modo la posibilidad de exportar tanto resultados numéricos como gráficos a un documento de salida.
El primer paso para realizar la simulación es conocer como modelar el Ciclo de Stirling. En un motor de ciclo abierto como un motor de combustión interna o una turbina de gas, las diferentes fases por las que pasa el gas (Ej. admisión, compresión, calentamiento, expansión y escape) ocurren sucesivamente y de manera bien diferenciada. Por el contrario, en un motor de ciclo cerrado como el motor Stirling, las fases del ciclo se combinan, de manera que mientras parte del gas se está calentando en una zona del motor, en otra puede estar enfriándose al mismo tiempo. Estas características propias del motor Stirling dificultan tanto el entendimiento como la simulación del ciclo termodinámico.
Teniendo en cuenta estas particularidades se disponen de varias posibilidades para realizar el modelado. Todas ellas difieren en el planteamiento y tratamiento de las ecuaciones que rigen el Ciclo de Stirling, en función de las aproximaciones supuestas durante su desarrollo. El primero en desarrollar matemáticamente el Ciclo de Stirling fue G. Schmidt (1871), que partió del ciclo ideal isotermo y suponiendo movimiento armónico de los pistones calculó la presión en el motor en función del ángulo de giro, usando para ello la ecuación de gas ideal, con el objetivo último de conocer el trabajo realizado [ 5 pp.89-98]. La capacidad de cálculo de los ordenadores permite hoy en día el uso de métodos más complejos en el tratamiento a las ecuaciones, que consisten en dividir el volumen total del motor en varios volúmenes control y aplicar una o varias de las ecuaciones de conservación (masa, momento, energía) a cada uno de ellos. Este tipo de métodos se conocen como Métodos de Tercer Orden [ 1 pp.136-141] y el resultado es un conjunto de ecuaciones diferenciales no lineales.
La simulación realizada en este proyecto se basa en un método de tercer orden, conocido como Método LHA [ 2 ]. La aplicación del método conlleva la división del motor en tres volúmenes control (volumen de expansión, volumen muerto, volumen de compresión) donde se aplican las ecuaciones de conservación de masa y energía. Estas ecuaciones se resuelven mediante la aproximación de considerar que las distintas variables termodinámicas (masa, temperatura, volumen) varían de forma armónica, debido precisamente a que el movimiento de los pistones es prácticamente armónico. Tras un conveniente tratamiento matemático mediante Series de Fourier las ecuaciones
Memoria
- Resultados generales de los motores Stirling donde se puede observar la tendencia de la potencia y la eficiencia frente a las variables de diseño más importantes (presión media, coeficiente de convección, caídas de presión, fugas, volumen muerto, desfase de pistones, temperaturas de focos, etc.).
- Diferencias entre el ciclo ideal de Stirling y el ciclo tratado por el programa. Se explican las causas termodinámicas tanto de las pérdidas tratadas como de las no tratadas por el programa.
- Archivo con los resultados obtenidos de varios motores que han sido objeto de estudio durante la realización del programa (GPU3, Motor Solo, Motor LDT, 400 HP).
Simulación del Motor Stirling por el Método LHA
2 MÉTODO LHA
2.1 INTRODUCCIÓN
Existen múltiples métodos para desarrollar las ecuaciones que rigen el Ciclo de Stirling, en función de las aproximaciones supuestas para su resolución. Según Martini (1978) [ 1 p.137] se pueden dividir en 3 grandes tipos: métodos de primer orden, métodos de segundo orden y métodos de tercer orden.
Los métodos de primer orden asumen el caso ideal, libre de pérdidas (por ejemplo Análisis de Schmidt [ 5 pp.89-98] anteriormente mencionado) y multiplican los resultados obtenidos por un factor de corrección para estimar los resultados de un motor real. Los métodos de segundo orden empiezan asumiendo el caso ideal, y a partir del mismo se van restando las posibles pérdidas (caídas de presión, imperfecciones en el regenerador, etc.). La ventaja añadida respecto a los métodos de primer orden es que se conoce la causa de las pérdidas pero no las interacciones entre ellas. Los métodos de tercer orden van más allá y usan una aproximación diferente. El motor es dividido en varios volúmenes control, a los cuales se les aplica las ecuaciones diferenciales de conservación. Los métodos de tercer orden tienen en cuenta las interacciones entre las pérdidas tratadas en todos los volúmenes control.
El Método LHA ( Linear Harmonic Analysis )] [ 2 ] es un método de tercer orden. Basa la resolución de las ecuaciones de conservación en la aproximación de que los pistones que conforman el motor tienen movimiento armónico. Y por lo tanto, se asume que todas las variables termodinámicas (masa, temperatura, presión, etc.) pueden ser representadas por una función armónica de la siguiente forma:
f ( t )= a + b sin( wt )+ c cos( wt ) [ 1 p.127] 2.
Donde a , b y c son las constantes que hay que resolver. De este modo las ecuaciones de conservación pueden ser linealizadas por Series de Fourier, obteniéndose finalmente un sistema lineal de ecuaciones que es resuelto por métodos matriciales convencionales (desarrollo matemático en anexo Método LHA). Las ecuaciones resueltas contienen cuatro de los principales mecanismos de pérdidas en un motor Stirling: Pérdidas adiabáticas, pérdidas transitorias de calor THT ( Transient Heat Transfer ), pérdidas por presión, y pérdidas por fugas ( leakage ).
El resultado de todo este proceso de resolución es un método eficiente (requiere pocas iteraciones), efectivo (obtiene resultados precisos) y estable (condición de estabilidad fácilmente satisfecha) que permite a la vez un conocimiento claro de los procesos físicos que ocurren a lo largo del ciclo [ 2 p.97]. Además las diferencia en los resultados obtenidos al resolver las ecuaciones por el Método LHA u otro método numérico de tercer orden que no asume variables termodinámicas armónicas (Ej. CSMP) es muy pequeña como se observa en la Figura 1:
Simulación del Motor Stirling por el Método LHA
2.2 METODOLOGÍA DE APLICACIÓN
El Método LHA aplicado a los diferentes volúmenes de control, da lugar a un conjunto de ecuaciones que después de ser linealizadas se resuelven por métodos matriciales convencionales y permite conocer las principales variables de comportamiento del motor (potencia, flujos de calor, temperatura, etc.). La Figura 2 muestra un esquema del proceso de aplicación del Método LHA.
Figura 2: Esquema Método LHA
El motor se divide en 3 volúmenes control (volumen de la zona de expansión, volumen muerto (calentador+regenerador+enfriador) y volumen de la zona de compresión)
Las ecuaciones de conservación de masa y energía se aplican a los volúmenes control
Se asume que la masa, temperatura y el movimiento de los pistones varían según funciones armónicas
Se linealiza la ecuación de gas ideal para poder conocer la presión instantánea
Se calculan las incógnitas cinemáticas a partir del movimiento armónico de los pistones
Todos los términos de las ecuaciones de conservación que no son lineales se aproximan por Series de Fourier
Las ecuaciones linealizadas adoptan la siguiente forma: ∑ Términos^ constantes +^ ∑ Términos^ sin( wt^ ) +^ ∑ Términos^ cos( wt^ ) =
Se calculan las temperaturas medias en las diferentes zonas del motor Te y Tc. Se ha de hacer una primera aproximación en la que Te = Th y Tc = Tk
Se resuelve el sistema lineal y se obtienen las incógnitas termodinámicas. Se comprueba la condición de convergencia para las temperaturas medias.
SISTEMA RESUELTO
CONVERGE
N O C O N V E R G E
Memoria
3 MEJORAS
3.1 INTRODUCCIÓN
Las constantes he, hc (coeficientes de convección); Kpe, Kpc (coeficientes de caída de presión) y Kmc (coeficiente de fugas); son a priori desconocidos. Con el Método LHA original hay que asignarles valores manualmente o valores obtenidos de experimentación directa con el motor. Por ello, una mejora planteada en este proyecto ha consistido en calcular estas constantes a través de diferentes correlaciones y en función de las variables de entrada del motor. Otra importante mejora llevada a cabo ha sido adaptar el Método LHA para que sea posible su uso en los tres tipos más importantes de motores Stirling (Alpha, Beta y Gamma). Las ecuaciones de conservación han sido resueltas para un motor tipo Beta, que por su estructura volumétrica equivalente son también válidas para un motor tipo Gamma (Para más información ir a anexo Método LHA, apartado 7). Por el contrario, para poder resolver con las ecuaciones planteadas el ciclo termodinámico de un motor tipo Alpha, se deben aplicar unos cambios en la geometría de este motor que permitan que el ciclo termodinámico sea equivalente al de un motor tipo Beta.
Seguidamente se exponen cada una de las mejoras realizadas: Cálculo de los coeficientes de convección, de los coeficientes de caídas por presión, del coeficiente de fugas y de las modificaciones necesarias para simular motores tipo Alpha.
3.2 COEFICIENTES DE CONVECCIÓN
Para el cálculo de los coeficientes de convección he y hc no existen correlaciones validas específicas para motores Stilring. Por esta razón se han usado correlaciones de amplio uso en MACI, de las que se sabe proporcionan resultados aceptables. Concretamente se han empleado las correlaciones de Woschni y Eichelberg (formulación disponible en el anexo Método LHA, apartado 6.2).
El coeficiente de convección tiene un valor diferente en cada instante ya que la temperatura y la presión varían con el ángulo de giro. Se realiza una aproximación del
valor medio del coeficiente de convección usando la presión media Pw y la temperatura de cada foco según se esté calculando el coeficiente de convección en la zona de expansión ( Th ) o en la de compresión ( Tk ).
Las propias correlaciones usadas tienen discrepancias matemáticas entre ellas. Woschni disminuye el coeficiente de convección al aumentar la temperatura, mientras que Eichelberg por el contrario lo aumenta. De todas maneras estas discrepancias están dentro del espíritu de la aproximación, ya que lo importante es conseguir acertar en el orden de magnitud del coeficiente de convección, más que en un valor exacto.
Mediante el valor de los coeficientes de convección, se determina en que situación se encuentra el motor simulado, en cuanto a si es isotermo ( h alto), adiabático ( h bajo) o semiadiabático ( h intermedio).
Memoria
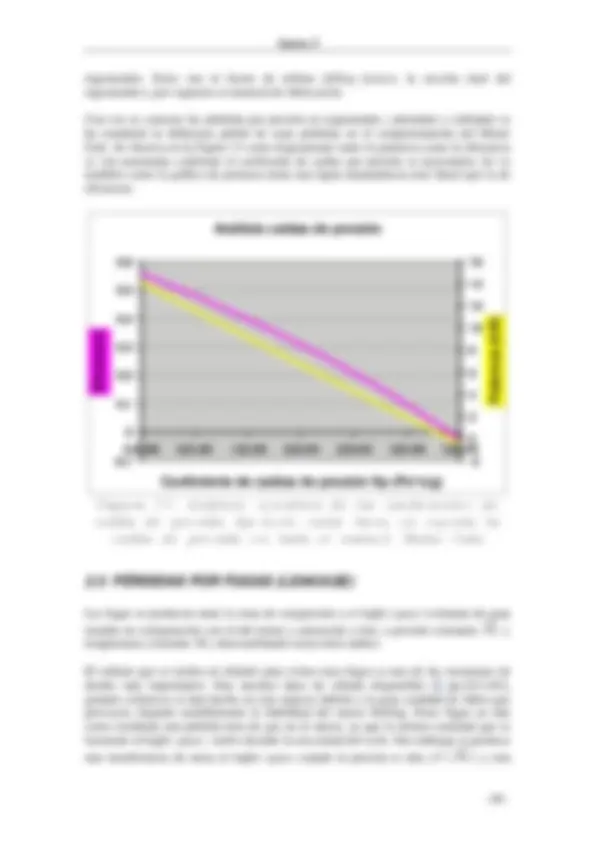
Figura 3: Algoritmo para calcular la constante de caídas de presión
3.4 COEFICIENTE DE FUGAS (LEAKAGE)
En último lugar es necesario evaluar Kmc , el término de las pérdidas por fugas ( leakage). Las pérdidas por fugas cuantitativamente no suelen ser relevantes en un motor Stirling, dependiendo de la holgura que se deje entre el pistón de potencia y el cilindro. En condiciones normales esta pérdida origina una disminución de la potencia indicada entorno a un 3% [ 5 pp.117-118&226-228].
Por el contrario es un problema constructivo y de diseño importante. El sellado es una de las principales causas de fallo en el motor por el desgaste que sufre, lo cual provoca que aumenten las fugas y por tanto una reducción tanto de la potencia como de la eficiencia desarrollada. En un motor Stirling tipo Beta se realizan tres tipos de sellado: Sellado exterior entre el bloque motor presurizado y el ambiente, sellado interior a lo
Calcular el flujo másico medio mflow que fluye en todas partes del motor
por igual
Calcular el número de Reynolds Re
Obtener el coeficiente de fricción Cf a partir del número de Reynolds
y la correlación correspondiente
Calcular la caída de presión ∆ P por la ecuación:
h
f d
C v l P 2
ρ^2 ∆ =
Calcular el coeficiente Kp correspondiente por la ecuación: Kp=
mflow
∆ P
Repetir estos pasos para el calentador, enfriador y regenerador
Simulación del Motor Stirling por el Método LHA
largo del desplazador y sellado interior a lo largo del pistón de potencia. El primero soporta toda la diferencia de presión aunque al no formar parte de los volúmenes control se considera perfecto. El segundo soporta toda la diferencia de temperatura entre la zona de compresión y expansión, pero no es necesario un sellado muy estanco debido a que el flujo a través de él actúa como un regenerador. El último tipo de sellado es el que afecta a las fugas consideradas en el Método LHA. Este último sellado tiene que ser muy estanco y por lo tanto se realiza en la zona de compresión, debido a que las altas temperaturas de la zona de expansión no permiten el uso de materiales de sellado asequibles [ 5 pp.223-241].
Se ha encontrado una correlación para calcular las pérdidas por fugas, pero los datos necesarios del motor para implementarla son complicados de obtener (para ver fórmula matemática ir a anexo Método LHA, apartado 6.4). Por lo tanto se ha decidido simular con valor nulo de Kmc por defecto, con la posibilidad de cambiar este valor de manera manual.
3.5 EQUIVALENCIA BETA-ALPHA
El Método LHA original basa su desarrollo en un motor tipo Beta (también conocido como motor de desplazador) el cual tiene la característica de que el volumen de la zona de compresión se forma por el movimiento conjunto del pistón desplazador y del pistón de potencia. El motor tipo Gamma tiene una estructura volumétrica equivalente al motor tipo Beta, diferenciándose únicamente en que el primero posee cada pistón en un cilindro diferente. Por el contrario, el motor tipo Alpha (también conocido como motor de pistones opuestos: pistón de compresión y pistón de expansión) tiene un pistón de compresión que determina por si solo el volumen de la zona de compresión.
Para lidiar con esta diferencia en las variaciones de volumen que ofrece cada tipo de motor, se usa el tratamiento de Finkelstein [13 pp.93-97] que modifica las carreras y desfases de los pistones con el objetivo de que las variaciones de volumen sean las mismas independientemente del tipo de motor a estudiar. Al conseguirse la misma variación volumétrica se garantiza que el ciclo termodinámico es equivalente. (Para ver el desarrollo matemático ir a anexo Método LHA, apartado 6.5).
4 CÓDIGO
Todo el proceso de modelado del ciclo, resolución de las ecuaciones de conservación por el Método LHA y cálculo de las constantes que definen las pérdidas se ha implementado en forma de código informático para poder realizar el programa que permite simular motores Stirling. Todas los cálculos han sido implementados en lenguaje M ( Matlab ), mediante funciones y scripts interrelacionados para obtener finalmente tanto resultados numéricos como gráficos. Los datos de entrada y salida con para el código se proporcionan a partir de documentos Excel. En el mismo documento Excel de entrada se calculan los cambios geométricos necesarios para poder simular un motor tipo Alpha, asi como la ayuda para la estimación de las superficies de transferencia de calor.
El algoritmo del proceso de resolución en Matlab se muestra en la Figura 4.
Simulación del Motor Stirling por el Método LHA
5 PROGRAMA
5.1 GENERALIDADES
Con objeto de permitir un manejo rápido e intuitivo se ha creado un programa a partir del código anterior. De esta manera se facilita una interacción fluida entre datos de entrada y datos de salida, en un entorno de fácil utilización para el usuario.
La aplicación para realizar el programa es Guide de Matlab, de amplio uso en el ámbito científico y que permite la posibilidad de realizar ejecutables y de esta manera usar el programa sin necesidad de tener instalado el Software Matlab, resultando necesario sólo un compilador.
Los datos de entrada son suministrados a través de un Documento Excel, mediante una plantilla normalizada. Estos datos de entrada son sobretodo datos geométricos (carreras, diámetros, desfases, etc.) y los datos termodinámicos de diseño (presión media, temperaturas de los focos, etc.). También se elige el gas de trabajo entre los más comunes en el motor Stirling: Helio, Aire, Hidrogeno, Nitrógeno. A partir de estos datos de entrada se realiza cada simulación deseada y los resultados intermedios y finales obtenidos se transfieren a otro Documento Excel, también en forma de plantilla normalizada. Estos datos de salida son numerosos, citando algunos como la potencia, eficiencia, coeficientes de pérdidas por presión, convección etc. así como resultados intermedios pero igualmente interesantes como Números de Reynolds, velocidades en diferentes partes del motor, flujo másico medio etc. También son volcados todos los resultados gráficos generados durante las simulaciones (potencia a lo largo del ciclo, masas en las diferentes zonas a lo largo del ciclo, temperaturas a lo largo del ciclo, diagrama Presión-Volumen, etc.).
Por otro lado el programa permite también un modo manual por medio del cual el usuario elige las constantes de caída de presión Kpe, Kpc y Kpr , de leakage Kmc y coeficientes de convección he y hc. También tiene la opción de realizar análisis sensitivos donde obtener la potencia y eficiencia en función de los parámetros más influyentes (temperaturas de los focos, caídas de presión, desfase en el movimiento de pistones, etc.).
Memoria
5.2 APARIENCIA
Figura 5: Pantalla general del programa (Usar en 1280x1024 para correcta visualización)
En la Figura 5 se puede ver la apariencia general del programa, la cual contiene cinco espacios para gráficas:
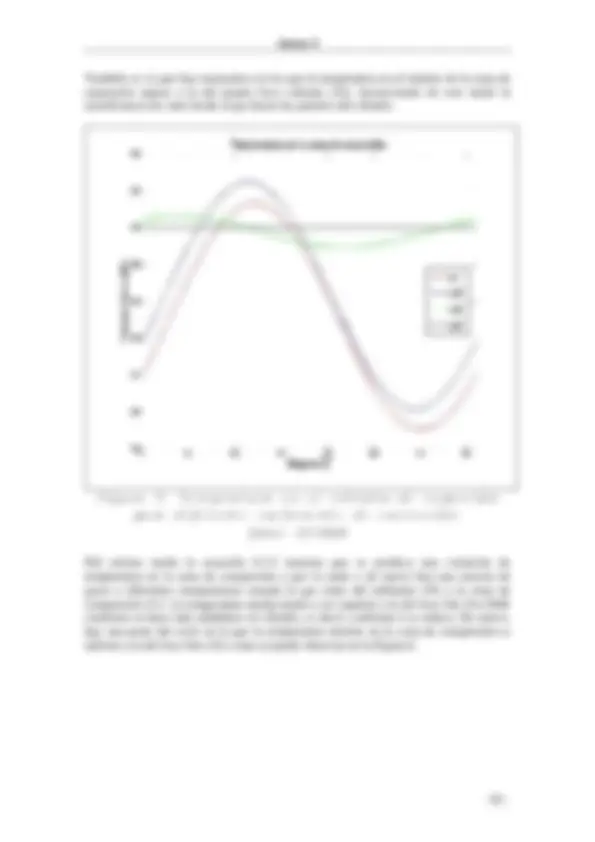
1- Está dedicada a las variaciones de masa respecto al ángulo girado en el motor. Aquí se puede representar la masa en la zona de expansión, la masa en la zona de compresión y la masa en la zona muerta del motor (calentador+enfriador+regenerador). 2- Está dedicada a las variaciones de temperatura, de flujo de calor y potencia respecto al ángulo girado en el motor. Contiene por tanto temperatura en la zona de expansión/compresión, flujo de calor a través de las paredes de la zona de
A
B
1
3 5 4
2
Memoria
5.3 FUENTES DE INCERTIDUMBRE
Una vez realizado el programa se ha testeado con varios motores cuyas características son conocidas*^ con el objetivo de comprobar la validez del método LHA y el correcto funcionamiento del programa (los resultados se pueden ver para cada motor simulado en los anexos de motores).
Las desviaciones entre los resultados reales y los resultados obtenidos con el programa se deben a tres fuentes de incertidumbre bien diferenciadas:
1- Incertidumbre en los datos de entrada: por falta de datos precisos y necesidad de suposiciones para obtenerlos (áreas medias, volúmenes muertos, etc.). La falta de una nomenclatura unificada al presentar los parámetros de diseño y operación de los motores Stirling dificulta la obtención de los datos de entrada para el programa.
2- Incertidumbre en el análisis llevado a cabo para la obtención de parámetros (coeficientes de convección, fugas, caídas de presión, calores específicos…). Uno de los más importantes es Kpr, que evalúa las pérdidas de presión en el regenerador. Debido a la gran variedad de tipos de regenerador y las características del flujo que circula a través de él (canales muy estrechos y flujo no estacionario) hace imposible encontrar siquiera un abanico de correlaciones válidas para todo tipo de regeneradores.
3- Incertidumbre del método y pérdidas no tratadas en el programa. Las discrepancias matemáticas de aproximación del método son tanto la suposición de partida de variables termodinámicas variando armónicamente como también todas las pérdidas no tratadas (intercambiadores de calor imperfectos, regenerador imperfecto, conducción de calor a través de las paredes de los cilindros, perdidas térmicas en el hueco del desplazador, perdidas de calor fuera del ciclo, perdidas mecánicas).[ 5 pp.112-118]
El primer tipo de incertidumbre no es propio del Método LHA, y depende de la información disponible sobre el motor a simular. Es solucionable teniendo el motor de cálculo presente para hacer mediciones de todas las variables geométricas. Esto no siempre es posible, pero muestra que son errores previos a la aplicación del Método LHA.
El segundo tipo son los errores presentes en las mejoras realizadas al LHA y que dependen de las correlaciones usadas.
El último apartado es la incertidumbre propia del método, tanto las aproximaciones matemáticas para la resolución de las ecuaciones, asi como las pérdidas no tratadas (Para más información ir a anexo Ciclo Termodinámico Método LHA, apartado 5).
- (^) Por conocidas se refiere a que los resultados se han obtenido de la diferente bibliografía disponible o de
documentos internos del Área de Máquinas y Motores Térmicos de la EINA.
Simulación del Motor Stirling por el Método LHA
6 RESULTADOS Y ANÁLISIS
6.1 RESULTADOS GENERALES
Debido a las particularidades intrínsecas del Ciclo de Stirling hay una serie de características en el comportamiento comunes a la mayoría de los motores Stirling. Haciendo uso del programa desarrollado se han estudiado estas características que comparten los motores simulados, las cuales se detallan a continuación.
La potencia desarrollada a lo largo del ciclo presenta unos valores extremos muy grandes respecto al valor medio, es decir, respecto a la potencia neta del motor. Observando la Figura 6 se observa como para el Motor Solo se tiene un pico durante la expansión de aproximadamente 210 kW y durante la compresión de unos 196 kW. Mientras que la potencia neta es de unos 14 kW, es decir, unas 13 veces menos que los valores extremos.
Potencia generada
**-
-** -
0
50
100
150
200
250
0 50 100 150 200 250 300 350
Ángulo de giro (º)
Potencia (kW)
Figura 6: Potencia indicada desarrollada por el motor a lo largo del ciclo. Motor Solo
La gran magnitud de los valores extremos de potencia respecto al valor medio es consecuencia conjunta de la alta presión media en el motor y la reducida relación de presiones como se observa en la Figura 7. Ambas son características generales en el diseño de un motor Stirling. Para el motor Solo la presión media:
Pw = 11. 2 MPa
y la relación de presiones: