



Estática. Estabilidad y equilibrio
Momento angular
Equilibrio
Biostática
José A. Peláez
Área de Física de la Tierra
Departamento de Física
Universidad de Jaén
























Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Asignatura: Física para biólogos, Profesor: J.A. Pelaez, Carrera: Biología, Universidad: UJAEN
Tipo: Apuntes
1 / 33

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
Momento angular Equilibrio Biostática
José A. Peláez Área de Física de la Tierra Departamento de Física Universidad de Jaén
1.1. Definición
Es una nueva variable cinemática relacionada con las rotaciones. El momento angular respecto del punto O se define mediante la expresión
Vemos que es siempre perpendicular a su velocidad y vector posición.
Para el caso de un movimiento circular uniforme (circunferencia de radio 𝑅𝑅), tendrá siempre la misma dirección y módulo.
En el caso de muchas partículas girando todas alrededor del mismo eje con la misma 𝜔𝜔
y si hablamos de un cuerpo continuo
𝑉𝑉
En todos los casos, podremos escribir 𝐿𝐿 (^) 𝑧𝑧 = 𝐼𝐼𝜔𝜔, en donde 𝐼𝐼 es el llamado momento de inercia. Es una cantidad que no depende del estado de movimiento, sino de la forma del cuerpo, de su densidad y del eje de giro.
𝑉𝑉
Son equivalentes, para la traslación y la rotación, las expresiones
𝑝𝑝 = 𝑚𝑚𝑣𝑣 ↔ 𝐿𝐿𝑧𝑧 = 𝐼𝐼𝜔𝜔
Ejemplo 1. Calcula el momento de inercia de una barra uniforme respecto de un eje perpendicular a la barra que pasa por uno de sus extremos.
𝑉𝑉
𝐿𝐿
0
𝐿𝐿
0
Ejemplo 2. Calcúlalo respecto de un eje que pasa por su centro.
+𝐿𝐿/ 2
−𝐿𝐿/ 2
+𝐿𝐿/ 2
−𝐿𝐿/ 2
Ejemplo 3. Calcula el momento de inercia de un aro/anillo respecto a un eje perpendicular que pasa por su centro.
1.3. Conservación del momento angular y momento de una fuerza
Calculemos la variación del momento angular con el tiempo. Para ello
A Γ se le llama momento de la fuerza 𝐹𝐹⃗ respecto del punto O, y es perpendicular al plano que forman la fuerza y el punto ( 𝜏𝜏⃗ ; torque). Es
importante especificar el punto respecto del que se calculan 𝐿𝐿 y Γ.
Γ = Γ = 𝑟𝑟𝐹𝐹 sin 𝛼𝛼
Ejemplo : Calculemos el momento del peso de un cuerpo de masa 5 kg sujeto en la mano de una persona respecto de los puntos de giro de la muñeca, el codo y el hombro, cuando el brazo está extendido formando un ángulo de 45º respecto de la vertical.
A partir de la expresión
vemos que el momento angular 𝐿𝐿 se conserva (su derivada es cero) si
Γ𝑖𝑖 = 𝑟𝑟𝑖𝑖 𝐹𝐹𝑖𝑖 sin 𝛼𝛼 (^) 𝑖𝑖 = 𝑚𝑚𝑚𝑚𝑑𝑑𝑖𝑖
¿Por qué un felino puede caer de pie aunque la caída la comience de espaldas con las patas hacia arriba?
Si su cuerpo fuera rígido, evidentemente no podría. Lo consigue porque puede hacer girar diferen- tes partes de su cuerpo alrededor de ejes diferentes.
De esa forma consigue que el momento angular total siga siendo cero, al igual que antes de la caída. Se compensa el momento del giro conjunto del cuer- po (𝐿𝐿 0 ) con lo momentos opuestos de los giros inver- sos de los dos cilindros (𝐿𝐿 1 y 𝐿𝐿 2 ) del modelo.
2.1. Centro de masas
Para un sistema formado por N partículas, podríamos decir que es un promedio ponderado de las posiciones de esas N partículas.
Para el caso de un cuerpo continuo
𝑉𝑉
En cuerpos con cierta simetría, el CM se encuentra en el centro, eje o plano de simetría.
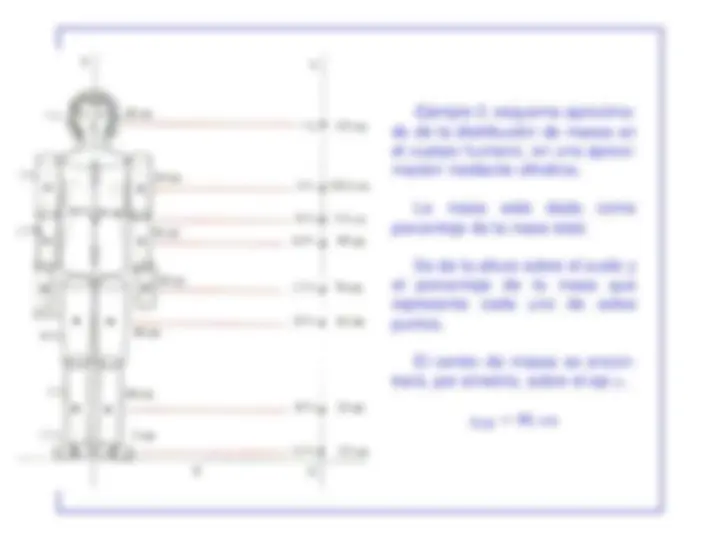
Ejemplo 5. esquema aproxima- do de la distribución de masas en el cuerpo humano, en una aproxi- mación mediante cilindros.
La masa está dada como porcentaje de la masa total.
Se da la altura sobre el suelo y el porcentaje de la masa que representa cada uno de estos puntos.
El centro de masas se encon- trará, por simetría, sobre el eje 𝑦𝑦.
2.2. Equilibrio
El CM se mueve con una aceleración igual a la que tendría una partícula que concentrara toda la masa del cuerpo y sobre la que actuara la suma de todas las fuerzas externas. En el caso de la fuerza peso,
Si la suma de las fuerzas que actúan sobre un cuerpo es cero, la acelera- ción de su centro de masas es cero, pero aún así, puede girar alrededor de un eje que pase por su CM. Es el caso de una barra sobre la que actúan dos fuerzas iguales y de sentidos contrarios en sus extremos. La razón es que el momento total de las fuerzas externas es diferente de cero.
l Γ = 𝑟𝑟⃗ 1 − 𝑟𝑟⃗ 2 𝐹𝐹 1 sin 𝜃𝜃 = 𝑙𝑙𝐹𝐹 1
Ejemplo. Tenemos tres ladrillos iguales. Vamos a estudiar la configuración de equilibrio en la que el borde de cada uno está separado una distancia igual del borde del ladrillo que tiene debajo.
Para que el de arriba esté en equilibrio, basta con que 𝑑𝑑 < 𝐿𝐿 ⁄ 2
El CM de los dos ladrillos de arriba estará pues en la posición
Para que estos dos estén en equilibrio sobre el tercero, es preciso que el CM de los dos anteriores esté sobre la superficie del tercero, es decir
𝐿𝐿 + 3𝑑𝑑 2
2.3. El equilibrio en personas y animales
En el caso de personas, hay equilibrio cuando la vertical del CM cae sobre la superficie limitada por los dos pies.
Se cumplirá en el equilibrio que
Si movemos el CM hasta que se encuentre cerca de un pie, la fuerza de reacción aumentará en dicho pie, como indica la anterior expresión. La sensación, por tanto, será diferente en cada pie.
El CM cae unos 3 cm por delante de los tobillos. Si estos no estuvieran rígidos por la acción de los músculos que conectan con el tendón de Aquiles, nos caeríamos hacia adelante.
En los cuadrúpedos, al caminar sólo levantan una pata, y el CM cae dentro del triángulo delimitado por las otras tres. No les resulta problemático pararse manteniendo una pata en el aire.
Para una persona es más difícil andar y mantener el CM encima de la superficie de sustentación de un solo pie. Es por eso que aparece un bamboleo lateral.
El correr, tanto para una persona como para un cuadrúpedo es una situación de desequilibrio. El cuerpo tiende a caer hasta que las patas que estaban en el aire tocan el suelo y se recupera la estabilidad (equilibrio).
Los animales de pies pequeños, como los artrópodos, tendrían mucha dificultad para andar sobre dos patas; la superficie de sustentación es prácticamente una recta.
Es por eso que los insectos mantienen siempre tres patas sobre el suelo; organizan sus seis patas en dos trípodes.
Los cápridos tienen un sistema muscular y neurológico de equilibrio muy perfeccionado.