Scarica Geomatica - Risposte Aperte - AGGIORNATO e CORRETTO e più Panieri in PDF di Geotecnica solo su Docsity!
GEOMATICA:
RISPOSTE Aperte
Assumendo che la durezza Y dei gusci di uova deposte da una certa razza di galline sia linearmente dipendente
dalla quantità X di un certo integratore nella dieta delle galline secondo il modello lineare
Y= a + bX, calcolare i coefficienti a e b con il metodo dei minimi quadrati. (Lezione 16-5)
Y= 2.047 X + 1.
μy= 0.7+0.98+1.16/3= 0.946 μx= 0.12+0.21+0.34/3=0.223 Con (x,y) = 0.017 y= 2.047x + 1. α= cov ( xg) / Sx^2 = 2.
Che cosa è il campo geodetico? (Lezione 25-5)
E’ l’intorno la cui estensione del rilievo è dell’ordine di 100 km di raggio rispetto ad una punto baricentrico O, in cui si può sostituire l’ellissoide con una sfera di R calcolati in O. Si usa la trigonometria sferica.
Che cosa è il campo topografico? (Lezione 25-6)
Se l’estensione del rilievo è limitata a 10 km di raggio rispetto ad un punto baricentrico, ci si può riferire ad un piano Tangente all’ellissoide e si parla di rilievo orizzontale. I triangoli possono essere risolti con la geometria piana.
Che cosa è il datum ED50? (Lezione 59-10)
ED50 è un Datum geodetico definito dopo la seconda guerra mondiale allo scopo di uniformare le reti geodetiche di vari paesi del nord Europa che risultavano al tempo incompatibili e rendevano quindi complicata la definizione di confini concordemente riconosciuti. Il Nome ED50 sta per European Datum 1950 e definisce il sistema geodetico, riferito ai dati misurati nel 1950.L'ellissoide di riferimento associato a questo sistema è l'ellissoide internazionale Hayford orientato a Potsdam (Torre di Helmert).Le coordinate del punto di emanazione sono: -Latitudine: 52°22'51,4456" Nord
- Longitudine: 13°03'58,9283" Est Il meridiano fondamentale è quello di Greenwich. La rete geodetica associata è quella derivata dalle reti degli Stati europei compensate in blocco. Viene utilizzata in Italia per la suddivisione dei fogli dell'IGM di nuova produzione.
Che cosa è il fattore di contrazione in cartografia? (Lezione 59-15)
In Gauss Boaga si un fattore di contrazione pari a 0,996 per limitare la deformazione dei fusi.
Che cosa è il fattore di scala? (Lezione 56-11)
Le rappresentazioni diventano cartacee quando definita una scala 1:N gli elementi vengono gratificati. Il fattore N è identico in tutte le direzioni.
Che cosa è il fuso ovest ed il fuso est nella cartografia ufficiale italiana? (Lezione 59-14)
Per rappresentare l’Italia si sono creati due fusi di ampiezza 80 aventi come meridiano il riferimento di Greenwich
Che cosa è il geoide? (Lezione 21-3)
In ogni campo che ammette potenziale posso definite le superfici equipotenziali. In una superficie ho che W(P) = cost V P € S ‘. Un’importante superficie equipotenziale è il geoide. Esso è la superficie equipotenziale del campo di gravità che la superficie degli oceani assumerebbe in assenza di fattori influenzanti, come vento e mare. Ha una forma prossima a quella della terra ed è definibile una geometria su di esso. E’ definibile la quota ortometrica in maniera univoca.
Che cosa è il moto del centro di fase di una antenna GPS e come se ne tiene conto durante l'elaborazione delle
osservazioni GPS? (Lezione 45-20)
La distanza satellite/ricevitore è misurata con gli estremi nei centri di fase delle antenne. Per ogni antenna è fornita la posizione media del centro di fase rispetto ad un punto dell’antenna ( punto in cui l’antenna viene attivata) in posizionamenti di alta precisione devo prevedere la correzione da apportare alla posizione media del centro di fase ( tutti i modelli di antenna negli ultima anni sono calibrati da un robot). Le antenne talvolta sono protette da sistemi per neve, acqua etc.. Queste coperture modificano il moto del centro di fase e devono essere cambiate.
Che cosa è il protocollo RTCM? (Lezione 51-5)
È il protocollo standardizzato per lo scambio di dati all'interno di una rete di stazioni permanenti GNSS.
Che cosa è l’errore di graficismo? (Lezione 56-9)
L’errore di graficismo è un errore che commettiamo nel disegnare la carta. Tutte le carte, quindi, richiedono che le deformazioni siano inferiori all’errore di graficismo pari a 0,2 mm.
Che cosa è la convergenza del meridiano? (Lezione 58-14)
Per ridurre il valore agli estremi del fuso si è creato sul meridiano centrale del fuso una deformazione di contrazione. I due meridiani ad Est ed Ovest del meridiano centrale, si chiamano meridiani standard ed hanno contrazioni nella parte compresa tra i meridiani standard e dilatazione nella parte restante del fuso.
Che cosa è la matrice dei cofattori nella soluzione del problema dei minimi quadrati? (Lezione 14-4)
La matrice dei cofattori Q è una matrice simmetrica 3x3 presente nella definizione di modello stocastico legata alla matrice di covarianza Cyy del vettore delle osservazioni. E' strettamente definita positiva e diagonale, cioè una matrice in cui gli elementi extradiagonale sono nulli.
Che cosa è la matrice normale nella soluzione del problema dei minimi quadrati? (Lezione 14-3)
I vettori stimatori che risolvono il problema sono ( y0 – y ) 1( y0 –y^) = min. Dy^= Ax^ + d. x^= N 1 A+^ K 1 y^= Y0 – QD+^1 Ua N= A+^1 A MATRICE NORMALE
Che cosa è la Rete Dinamica Nazionale (RDN)? (Lezione 53-5)
La rete dinamica nazionale è una rete che ha lo scopo di organizzare suo territorio italiano stazioni permanenti GPS stabilmente materializzate, che osservano i segnali GNSS e li trasmettono ad un centro di calcolo. E’ composta da 99 stazioni.
Che cosa è la riduzione alle corde in cartografia? (Lezione 58-13)
E’ l’angolo ε 12 tra la tangente trasformata in P’ ed il segmento rettilineo che congiunge gli estremi.
Che cosa è la tecnica DGPS? (Lezione 50-8)
Tecnica di posizionamento GPS che sfrutta la capacità di parte di un ricevitore di calcolare la correzione degli errori da inviare ad un altro ricevitore. E’ costituito da stazione MASTER e ricevitore ROVER.
Che cosa è l'ambiguità iniziale di fase nelle misure GPS? (Lezione 44-12)
E’ un valore costante nel tempo. Si può risolvere considerando osservazioni in epoche diverse
Che cosa è necessario per fare cartografia? (Lezione 56-10)
- Stabilire un sistema di riferimento.
- Fissare una rete di punti e misure che realizzano il datum.
- Stabilire il tipo di rappresentazione cartografica e parametri di applicazione.
Che cosa è un foglio ufficiale nella cartografia italiana? (Lezione 59-18)
La rappresentazione di 4 tavolette in un’unica carta a scala 1 50000 rappresentata in un 1 quadrante. 4 quadranti in un’unica carta a scala 1 100000 rappresentano un foglio.
Che cosa è un modello deterministico? (Lezione 14-1)
Consiste in un dato vettore di valori yo ( y1, y2,.....yn) tratto da una v.c.n. dimensionale y, di cui si sa che il valore medio è y= E {y} appartenente ad una varietà lineare in n dimensioni, detta varietà valori ammissibili
Che cosa è un modello stocastico? (Lezione 14-2)
Come g in più conoscendo le modalità di misura si afferma che la matrice di covarianza di y ha la formula Cyy= Ϭo2 incognito Q matrice positiva
Che cosa è un rilievo NTRKL? (Lezione 51-6)
Le tecniche di posizionamento cinematico in tempo reale che si stanno sviluppando di più sono quelle di NRTK (Network Real Time Kinematic), basate su reti di stazioni permanenti (CGPS), piuttosto che su una singola stazione master. Il principio di base è quello del DGPS, ovvero si utilizzano stazioni master da cui si possono ricavare delle correzioni da mandare al ricevitore rover, ma a differenza della tecnica DPGS, viene calcolata una soluzione mediata nello spazio. Esistono sostanzialmente tre modi per realizzarlo: NRTK fase VRS NRTK fase FKP NRTK fase MAC. Un sistema NRTK è in generale formato da tre elementi: rete di stazioni permanenti, centro di calcolo, utenti (rover).
Che cosa è una ambiguità di fase? (Lezione 44-10)
La misura della fase totale è Φt = θm (t) + Nr s sopra ( t0) AMBIGUITA’ DI FASE ed è per ogni satellite da cui si riceve il segnale
Che cosa è una intersezione diretta? (Lezione 40-5)
Permette di ottenere le coordinate di un punto P a partire da 2 punti di coordinare note e da misure di angoli azimutali e/o distanze. Abbiamo 3 possibilità a seconda delle misure che facciamo:
- Diretta con solo misure di angoli ( α e β misure)
- Diretta con misure di angoli e distanze (α e distanza AB misure)
- Diretta con sola misura di distanza ( distanza AB E distanza AP misure)
Che cosa è una intersezione inversa? (Lezione 40-4)
Nell’intersezione inversa occorre stazionarsi con il teodolite su un punto P e collimare almeno 3 punti di coordinate note, in modo da misurare i due angoli azimutali α e β. Gli schemi vengono risolti attraverso circonferenze. Nel caso dell’intersezione inversa non sempre arrivo alla soluzione perché esiste una circonferenza critica per cui le coordinate di P non possono essere determinate.
Come è definita una rappresentazione analitica.? (Lezione 56-17)
Nel metodo analitico si definiscono si definiscono equazioni di trasformazione cartografica che permettono di ottenere coordinate riferite al piano, a partire da coordinate sull’ellissoide e permettono quindi di avere una corrispondenza biunivoca.
Come è definito il datum altimetrico italiano? (Lezione 25-7)
Il datum altimetrico richiede una materializzazione attraverso una rete di punti di quota ortometrica nota. Per definire il datum altimetrico occorre stabilire un punto di quota nord sul geoide definbile tramite un manografo e materializzato con contrassegni verticali ed orizzontali. Per l’Italia il livello medio del mare è stato fissato da Genova = Genova 1942. Da qusta rete è possibile ricavare la quota dei punti.
Come è definito il sistema di riferimento delle misure GPS? (Lezione 43-4)
E’ un sistema di riferimento cartesiano geocentrico.
- Origine posta nel centro di massa della terra comprendendo gli oceani e l’atmosfera.
- Asse z // asse di rotazione terrestre.
- Asse x è dato dall’intersezione del piano equatoriale ┴ all’asse z con piano meridiano di Greenwich
- Asse y completa la terna cartesiana destrorsa. E’ un sistema solidale e non riferito alla terra. Come superficie di riferimento si una l’ellissoide WGS
Come è definito l’ellissoide di rotazione? (Lezione 21-5)
L’ellissoide di rotazione approssima la terra perché soddisfa tutte le condizioni di una superficie di riferimento. Dato un ellisse con semiasse > a e < b si ottiene l’ellissoide , ruotando la figura attorno al semiasse minore. L’equazione dell’ellissoide in coordinate cartesiane è x2 + y2/ a2 + z2/b2 = 1. In base all’orientamento dell’ellissoide abbiamo - ELLISSOIDI GEOCENTRICI ( origine nel centro della terra) -ELLISSOIDI ORIENTATI LOCALMENTE
Come si calcola l’azimut di una geodetica sul piano cartografico? (Lezione 58-15)
L’azimut è dato dalla somma dell’angolo di direzione della trasformata delle curve P1P2 e l’angolo γ chiamato convergenza del meridiano. A= θ 12 + γ.
Come si determina un dislivello da una livellazione trigonometrica con due misure di angoli zenitali?
(Lezione 36-1)
Poiché la distanza tra A e B non supera in genere i 100 km possiamo usare come superficie di riferimento una sfera R= √ Ρn. Il dislivello è calcolato in maniera indiretta: HB – HA= d ( 1+ Qm/R) tg1/2 ( Zba – Zab). Conoscendo HA posso dire che Qm = HA e quindi HBd.
Come si determina un dislivello da una livellazione trigonometrica con una misura di angolo zenitale?
(Lezione 36-2)
Supponiamo di aver misurato Zab( distanza zenitale), si può dimostrare che HB – HA = d (1+Qm/R) cotg (zab – d/2R). Se R→∞ otteniamo la formula livellazione riferita al piano orizzontale A. Ovvero HB – HA = do cotg Zab. Bisogna tener presente le altezze degli strumenti, pertanto la formula finale sarà hmisa + ∆Hab= Hteodolite + do cotg Zab.
Come si determinano le coordinate nel piano con una poligonale aperta? (Lezione 39-6)
Si effettuano solo misure strettamente necessarie. La regola di propagazione delle coordinate lungo la poligonale di n lati è { Xn= Xo + ∑ su n, sotto i=1 di sin θi Yn= Yo +∑ su n, sotto i=1 di cos θi con θi = αo + θpa con θpa = arctang Xq – Xp / Yq – Yp
Come si imposta un problema ai minimi quadrati con pure equazioni di condizione? (Lezione 15-6)
D = I → Y= Ax + d K= a N= A+^ Q 1 A { x^ = N 1 A+^1 ( xo – d) y = y0 – 1 U0 = yo – Uo = A^x + d
Come si leggono i cerchi di un teodolite con un microscopio a coincidenza? (Lezione 28-3)
Sul reticolo vengono portate le immagini dei due lembi diametralmente opposti del cerchio. Sul percorso di ognuna è inserita una lastra piano – parallela e le due lastre ruotano di una quantità uguale e contraria. Ne consegue che manovrando le lastre piano – parallele le 2 immagini traslano in senso opposto per cui si realizza la coincidenza dei tratti.
Come si leggono i cerchi di un teodolite con un microscopio a scala? (Lezione 28-1)
Sul reticolo è incisa una scala, con tratti equidistanti in un numero di parti sottomultiplo del valore inciso sulla gradazione principale. Il reticolo è posto più in alto o più in basso rispetto alla gradazione principale.
Come si leggono i cerchi di un teodolite con un microscopio a stima? (Lezione 28-2)
Si realizza interponendo un reticolo all’interno del cannocchiale di osservazione dei cerchi. La lettura viene fatta in corrispondenza del reticolo e stimando la porzione residua compressa nel tratto della gradazione principale.
Come si misura la distanza con un EDM a misura di fase? (Lezione 33-5)
L’EDM a misura di fase utilizza come campione di misura la lunghezza d’onda della radiazione emessa. Necessita di una mira per riflettere il segnale dell’onda elettromagnetica inviata dal distanziometro. La misura è una misura di differenza di fase. Viene misura la differenza di fase tra il segnale inviato dal distanziometro ed il è il segnale riflesso della mira.
Come si possono rappresentare in cartografia l’Antartide o l’Artico? (Lezione 57-8)
Tramite la proiezione stereografica polare. I punti dell’ellissoide proiettati su un piano tangente, da un polo con centro di proiezione sull’altro polo.
Come si può ridurre l’errore troposferico? (Lezione 45-19)
Posso effettuare modelli standard del profilo di rifrattività verticale. Posso effettuare un posizionamento relativo ( se baseline fra due ricevitori < 30 km) Posso effettuare posizionamenti differenziali ed effettuare una stima di parametri
Come si può schematizzare un teodolite? (Lezione 28-6)
Il teodolite è schematizzabile con 3 assi ortogonali fra loro. L’ asse principale a1 è diretto lungo la linea di forza del campo di gravità quindi può essere rappresentato dalla direzione di una filo a piombo. E’ costituito da un cannocchiale e due cerchi, uno nel piano orizzontale uno su quello verticale perpendicolare ad a2. Intorno all’asse a1 ruota l’alidada sulla quale è montato l’asse a2, intorno al quale ruota il cannocchiale su cui c’è l’asse a3 ( ASSE DI COLLIMAZIONE).
Come si può trasformare un set di coordinate IGM95 nel datum Roma40? (Lezione 52-7)
Possono essere trasformati manualmente acquistando dall’IGM le monografie IGM 95, oppure tramite il software vento dell’IGM.
Come si riduce l’errore ionosferico? (Lezione 45-18)
Il metodo più efficace per ridurre il disturbo ionosferico è la combinazione iono free che è l’impiego di segnali con frequenze differenti ( motivo principale per cui il GPS ha due portanti) Faccio una misura di codice: PL3 = aPL1 + bPLl Combinando linearmente L1 e L2 con coefficienti a e b ( scelti in modo che il disturbo su L1 e L2 si elimini, riesco ad ottenere un nuovo segnale di codice PL
Come si riduce la distanza inclinata misurata sulla superficie di riferimento? (Lezione 33-7)
Poiché la distanza di è sicuramente inferiore a 100 km possiamo approssimare l’ellissoide con la sfera locale ( campo geodetico) e d0= RS. Se la distanza è ancora + piccola e posso approssimare nel campo topografico, do= di sen z.
Come si risolve un problema ai minimi quadrati non lineari? (Lezione 17-6)
Un problema ai minimi quadrati non lineati si risolve linea rizzando il modello deterministico. Ovvero sapendo che l’insieme di osservazioni è descritta con equazioni non lineari, si cercheranno 2 stimatori x^ e y^ con g( y^:x^) = 0. Linearizzando g( y^:x^) = 0 e sommando i valori approssimati si ottengono le stime di x^ e y^
Come sono modulate le portanti GPS? (Lezione 44-14)
Sono modulate con codici pseudo – casuali o NR, sequenza binarie di valori tra 1 e -1 che appaiono avere un comportamento casuale perché la sequenza si ripete dopo un lungo periodo. I codici sono 2.
- PCODE ( modula entrambe le portanti)
- C-CODE ( trasmesso solo su L1)
Come sono rappresentate le coordinate ED50 sul piano cartografico? (Lezione 59-9)
E’ stato definito dopo la II guerra mondiale per collegare tra loro diversi stati ed usare un unico sistema di riferimento. E’ stata inserita una quadrettatura chilometrica con le coordinate ( E,N) UTM
Come viene ridotto il disturbo ionosferico se si utilizza in un ricevitore GPS a singola frequenza? (Lezione 45-21)
Per ridurre l’effetto ionosferico ho bisogno di un ricevitore a doppia frequenza, infatti questo è il motivo principale per il quale il GPS ha due portanti. Utilizzando la doppia frequenza, combinandole linearmente posso ridurre l’errore ionosferico
Come viene rimosso il disturbo ionosferico se si utilizza in un ricevitore GPS a doppia frequenza? (Lezione 45-15)
I coefficienti n1 e n2 sono scelti imponendo l'eliminazione dei ritardi ionosferici. Si ottiene così un nuovo osservabile in cui è rimosso l’effetto ionosferico al primo ordine. Nelle misure di fase si utilizza in genere la seguente combinazione L3, che ha una lunghezza d'onda di circa 10.7 cm ed è praticamente libero dal ritardo introdotto dalla ionosfera, per cui è chiamato “iono-free". L’utilizzo due frequenze rende possibile la rimozione dell’effetto al primo ordine del disturbo ionosferico. In alcuni periodi, quando l’attività solare è molto intesa, gli effetti di ordine superiore non sono trascurabile. Per questo motivo i nuovi satelliti GPS sono dotati di una terza frequenza chiamata L5 e anche il sistema Galileo è progettato con tre portanti.
Cosa è un grado centesimale? (Lezione 27-6)
E’ pari alla 400esima parte dell’angolo giro 1°= angolo giro/ 400. Rappresenta l’unità di misura degli angoli.
Cosa è un grado sessadecimale? (Lezione 27-11)
E’ pari alla trecentosessantaseiesima parte dell’angolo giro. 1° = angolo giro/ 366. Rappresenta l’unità di misura degli angoli.
Cosa è un grado sessagesimale? (Lezione 27-12)
E’ pari alla alla 360esima parte dell’angolo giro 1° = angolo giro/ 360. Rappresenta l’unità di misura degli angoli.
Cosa è una compensazione empirica? (Lezione 40-6)
Una poligonale può essere calcolata ma, in molti casi, visto il basso grado di esuberanza delle misure (solo tre) rispetto al minimo indispensabile si può procedere con una compensazione empirica. Le differenze rilevabili nelle coordinate dei vertici tra il metodo rigoroso e quello empirico sono di modesta entità e la preferenza del primo metodo rispetto al secondo può essere dettata da ragioni organizzative e non da una maggior precisione attesa. La compensazione empirica di una poligonale si esegue nel modo seguente): con le coordinate note dei punti P1, A, Un , B si calcolano gli angoli di direzione (P1A) e (PnB). Si calcolano poi gli angoli di direzione in tutti i vertici rimanenti. La differenza tra l'angolo di direzione (PnB) ottenuto attraverso gli angoli misurati ai e lo stesso angolo di direzione ottenuto attraverso le coordinate dei vertici P e B fornirà un errore di chiusura angolare: ea = (PnB)misure -(PnB)coordinate.
Cosa è una misura di codice o pseudo-range? (Lezione 44-15)
Si basano sulla misura del tempo di volo del segnale, ovvero il ∆t tra la trasmissione del segnale da parte del satellite e la ricezione da parte del ricevitore ( segnali identici ma sfasati nel tempo). La distanza satellire ricevitore è d= c ∆t
Descrivere brevemente i vantaggi e gli svantaggi della tecnica NRTK rispetto alla tecnica RTK. (Lezione 51-8)
--I vantaggi delle tecniche NRTK rispetto le tecniche RTK possono essere riassunti così:
- Le tecniche NRTK permettono di controllare la propria integrità e permettono di individuare se ci sono problemi con una particolare stazione permanente, cosa difficiele da fare se si usa una sola stazione master.
- Poiché le stazioni permanenti fanno parte di una rete, il non funzionamento di una di esse non inficia l’intera rete e il risultato del rilievo.
- Il rilievo NTRK permette la modellizzazione dell’atmosfera, non solo la stima d un bias, con un miglioramento nella stima delle coordinate.
- Tutti gli utilizzatori del sistema inquadrano il rilievo in un ben definito sistema di riferimento definito dalle stazioni master. --Gli svantaggi delle tecniche NRTK rispetto le tecniche RTK possono essere riassunti così:
- Occorre che ci sia una rete di stazioni permanenti, spesso gestita a livello regionale o da compagnie private, e questo spesso comporta una tessa di iscrizione per gli utenti, che così contribuiscono al mantenimento del servizio.
- L’uso della tecnica NTR può essere limitato dalla copertura della rete cellulare, infatti la tecnica richiede mezzi di comunicazione wireless molto efficienti, perché occorre una comunicazione bi-direzionale: il ricevitore, oltre a riceve i dati dal centro di calcolo, deve inviare la sua posizione. 3. Il funzionamento è legato all’esistenza di una rete di stazioni permanenti e alla sua densità.
Descrivere che cosa è il disturbo ionosferico nella misure GPS (Lezione 45-14)
La ionosfera è la parte dell'atmosfera che si estende approssimativamente fra i 50 e i 100 km di altitudine, nella quale la radiazione solare ultravioletta proveniente dal Sole provoca la dissociazione e la ionizzazione delle molecole gassose presenti, determinando uno strato di elettroni liberi. Alle frequenze del segnale GPS (onde radio in banda L), la ionosfera è un mezzo dispersivo, per cui le onde elettromagnetiche del segnale GPS che si propagano in essa hanno velocità che dipende dalla loro frequenza. La dispersività di un mezzo è determinata dalla interazione fra il campo esterno dell'onda e il campo del mezzo elettricamente carico (in questo caso la ionosfera), a causa della presenza di momenti di dipolo indotti nelle molecole e di elettroni liberi. Quando la frequenza atomica del mezzo e la frequenza dell'onda che vi penetra sono vicine, si assiste al fenomeno della risonanza, che genera la dipendenza della velocità di propagazione dalla frequenza dell'onda. Il ritardo, o l'anticipo, subito dal segnale dipende dalla densità elettronica ne, di cui è difficile trovare un modello soddisfacente, in grado di tenere conto delle sue variazioni nel tempo. La concentrazione di elettroni liberi nella ionosfera è fortemente correlata alla quota e soprattutto all'attività delle macchie solari, quindi presenta variazioni stagionali e giornaliere. Il metodo più efficace per ridurre l'influenza ionosferica è l'impiego di segnali con frequenze differenti. Questo è il motivo principale per cui il segnale GPS ha due onde portanti, L1 e L2. I coefficienti n1 e n2 sono scelti imponendo l'eliminazione dei ritardi ionosferici. Si ottiene così un nuovo osservabile in cui è rimosso l’effetto ionosferico al primo ordine. Nelle misure di fase si utilizza in genere la seguente combinazione L3, che ha una lunghezza d'onda di circa 10.7 cm ed è praticamente libero dal ritardo introdotto dalla ionosfera, per cui è chiamato “iono-free". L’utilizzo due frequenze rende possibile la rimozione dell’effetto al primo ordine del disturbo ionosferico. In alcuni periodi, quando l’attività solare è molto intesa, gli effetti di ordine superiore non sono trascurabile. Per questo motivo i nuovi satelliti GPS sono dotati di una terza frequenza chiamata L5 e anche il sistema Galileo è progettato con tre portanti.
Descrivere che cosa è un angolo azimutale e descrivere come si misura (Lezione 27-10)
Se facciamo stazione in un punto O l’angolo azimutale tra 2 punti A e b è dato dall’angolo diedro formato del piano che contiene la verticale per l’appunto A e il piano che contiene la verticale per il punto B. L’angolo si ottiene attraverso dei passaggi innanzitutto una lettura sul cerchio orizzontale del teodolite, collimando un punto ( uno degli estremi del triangolo tra lo strumento e i 2 punti. Quindi collimo A ed effettuo lettura sul cerchio orizzontale ( A) , collimo B ed effettuo lettura cerchio orizzontale ( B). α( angolo azimutale) = differenza tra le due letture
Descrivere che cosa è un angolo zenitale e descrivere come si misura. (Lezione 27-9)
Consideriamo un punto O di stazionamento e il punto A, il punto che andiamo a collimare, con il cannocchiale. L’angolo zenitale è l’angolo formato dalla normale passante per O e la linea di congiunzione tra O e A. Viene effettuata utilizzando il cerchio verticale. Collimo punto A e si legge il cerchio verticale dell’indice di lettura lcs. In questo caso l’asse a1 e a3 formano l’angolo zenitale zsa. Ruotando l’alidada di 200 gon e collimando di nuovo il punto A ho una seconda lettura lcd (lettura cerchio destro). Z= lcs – lcd + 400gon / 2
Descrivere gli errori di modello del GPS (Lezione 45-16)
Errori di modello sono (comuni al Pseudo/Range e a Misure di Fase)
- BIASES OROLOGI
- BIASES ORBITA ( errori dovuti alla conoscenza della posizione dei satelliti)
- BIASES ATMOSFERICI ( dovuti al passaggio dell’onda elettromagnetica nell’atmosfera)
- BIASES AMBIGUITA’ DELLE PORTANTI
- MODELLIZZAZIONE CENTRO DI FASE DELL’ANTENNA.
Descrivere gli errori di osservazione nel GPS. (Lezione 45-17)
Errori di osservazione( legati all’ambiente in cui facciamo le misure)
- MULTIPATH
- CYCLE SLIP
- CONFIGURAZIONE GEOMETICA DEI SATELLITI
Descrivere gli errori in una battuta di livellazione (Lezione 35-14)
Errori di lettura e collimazione stadia → Dipende dall’ampiezza di graduazione della stadia, dalla distanza di collimazione. Errore di verticalità della stadia → trascurabile. Perché la stadia è tenuta verticale da una livella sferica il massimo errore nella lettura è di qualche centesimo di millimetro Variazioni termiche sul livello e sulle stadie → Al variare della temperatura cambia la direzione dell’asse di collimazione. Occorre aspettare che lo strumento sia a temperatura ambiente. Errore residuo di verifica → E’ dovuto a variazioni termiche, piccoli usi
Descrivere gli errori strumentali del GPS. (Lezione 44-11)
Esiste una regola empirica che dice che l’errore nella misura della distanza satellite ricevitore è ≈ 1 -2% della lunghezza d’onda del segnale trasmesso. Per cui usando Codice C/A Ϭ= 3 – 6 mm Codice P Ϭ= 30 – 60 cm Codice portanti Ϭ= 2-4 mm
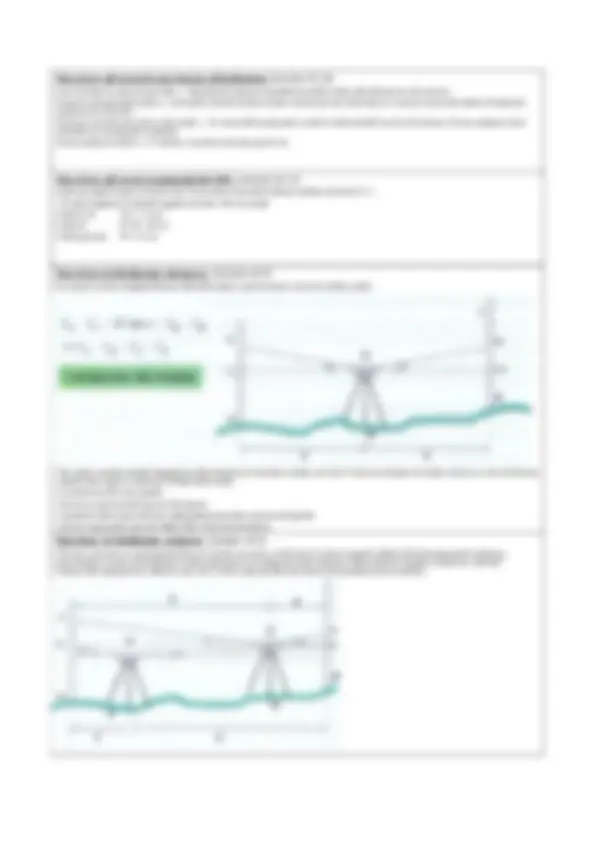
Descrivere la livellazione dal mezzo. (Lezione 42-5)
Se si pone il livello ad uguale distanza delle due stadie, si può eliminare l’errore di rettifica, infatti N.B. questo metodo richiede l’uguaglianza delle distanze fra strumento e stadia, non che il livello sta allineato alla stadie, anche se si cerca di farlo per mettersi nelle migliori condizioni di lettura delle stadie. La livellazione del mezzo quindi: -elimina le variazioni dell’asse di collimazione -consente di determinare dislivelli indipendentemente della curvatura del geoide -elimina in gran parte il piccolo effetto della rifrazione atmosferica
Descrivere la livellazione reciproca. (Lezione 42-2)
Nel caso in cui non ci si possa posizionare con il livello nel mezzo, si può usare lo schema operativo della livellazione geometrica reciproca, posizionando il livello ad una distanza d dalla stadia posta in A e dopo alla stessa distanza d dalla stadia B. Facendo la media fra i dislivelli misurati nelle due posizioni, abbiamo visto che il valore medio del dislivello è privo da eventuale errore di rettifica.
Per valutare la pendenza media p di un condotto idrico, è stata misurata la sua altezza a cinque diverse distanze
dal punto origine O. Le misure sono state effettuate in maniera indipendente e con uguale precisione. Sapendo
che la pendenza p del viadotto e la sua quota ΔH sono legate dalla seguente relazione, ΔHi = pXi i=1,..,3 stimare
ai minimi quadrati il valore del parametro p e il suo s.q.m. (Lezione 16-3)
MANCA LA RISPOSTA
Perchè è importante la rappresentazione di Mercatore? (Lezione 57-7)
E’ importante perché è utilizzata per navigazione nautica ed aerea.
Perchè si utilizzano le false origini in cartografia? (Lezione 59-13)
Date le coordinate (φ,λ) sull’ellissoide, si applicano le equazioni di Gauss per avere le coordinate nella rappresentazione cartografica. A queste si applica un fattore di contrazione pari a 0.9996 per ridurre le deformazioni lineari e poi si applica la falsa origine alle coordinate Est.
Qual è il datum delle coordinate della cartografia ufficiale italiana? (Lezione 59-11)
Il datum delle coordinate della cartografia ufficiale italiana è il datum TM che si una indicare con N l’asse delle ordinate e con E l’asse delle ascisse. E’ una rappresentazione per fusi, ognuno dei quali ha ampiezza 6°
Qual è l’errore nella misura della distanza? (Lezione 33-6)
Gli errori che possono incidere sulla misura della distanza, che sono sostanzialmente di due tipi: -Errori che dipendono dalla distanza che sono errori dovuti all’incertezza che si ha nella conoscenza della velocità di propagazione del segnale, conoscendo l’indice di rifrazione atmosferica solo in maniera approssimata (incidono quindi su entrambi i tipi di misura). -L’errore complesso nella misura della distanza che è dato da Ϭa= radice quadra di a2 + ( bxd) 2
Qual è la condizione di rettifica di un teodolite? (Lezione 28-7)
Si dice che il teodolite è rettificato se l'asse secondario a2 è normale all'asse primario a1, e l'asse di collimazione a3 è normale all'asse a2. Questa condizione si verifica manovrando le viti calanti e con l'ausilio di una livella torica si rende verticale l'asse primario e di conseguenza l'asse secondario diviene orizzontale. In questo modo l'asse di collimazione, ruotando intorno all'asse secondario, descrive un piano verticale.
Qual è la precisione di una battuta di livellazione? (Lezione 42-3)
Nella livellazione geometrica, la precisione del dislivello misurato dipende essenzialmente dalla precisione con cui vengono effettuate le misure sulla stadia e quindi da come vengono misurate la lunghezza L fra il punto di appoggio della stadia sul caposaldo e il punto in cui l’asse di collimazione incontra la stadia. Se chiamiamo σL la precisione di misura della lunghezza L, lo scarto quadratico medio (sqm) del dislivello è σΔ=√2σL Se il dislivello è ottenuto con n battute di livellazione di ugual precisione, si può ritenere σL pressoché costante e σΔ=√2 n σL Lo scarto quadratico medio σL deriva essenzialmente dallo s.q.m di lettura σ l che dipende essenzialmente da errori accidentali di centramento della livella o di funzionamento del compensatore. Se D è la distanza fra stadia e livello, l’errore σ l di lettura è quindi: Quindi, se D= 50m: σ l = ± 0.1 mm per livelli di altissima precisione σ l = ± 1-2 mm per livelli di bassa precisione
Qual è la precisione nella misura di un dislivello ottenuto con n battute di livellazione geometrica. (Lezione 42-4)
Se il dislivello è ottenuto con n battute di livellazione di ugual precisione, si può ritenere σL pressoché costante e σΔ=√2 n σL
(“vedi anche la domanda precedente della lezione 42-3”)
Qual è la proiezione usata per la cartografia ufficiale italiana? (Lezione 59-12)
In Italia vengono usate : -Gauss – Boaga nel riferimento ROMA 40
- UTM nel riferimento ED
- UTM nel riferimento WGS
- ETRF 2000
Qual è lo schema del tradizionale 3D? (Lezione 27- 5)
Sul reticolo vengono portate le immagini dei due lembi diametralmente opposti del carchio. Sul percorso di ognuna è inserita una lastra piano parallela e le due lastre notano di una quantità uguale e contraria. Ne consegue che manovrando le lastre piano – parallele le 2 immagini traslano in senso opposto per cui si realizza la coincidenza dei tratti.
Quali sono le equazioni al vincolo di una poligonale chiusa su sé stessa? (Lezione 39-7)
θ pt = Θpq + Ʃ n, i=1 α + a
Quali sono le equazioni di vincolo di una poligonale chiusa su punti noti? (Lezione 39-8)
Ʃ n, i=0 α = ( n-2) Ti
Quali sono le proprietà di un sistema di riferimento? (Lezione 21-7)
Un sistema di riferimento è definito da regole ed assunzioni: bisogna stabilire la sua origine e l’orientamento dei suoi assi, cioè quello che vene detto DATUM
Quali sono le proprietà di una superficie di riferimento? (Lezione 21-4)
la superficie di riferimento è associata ad un sistema di riferimento che deve soddisfare le seguenti proprietà:
- Esprimibile analiticamente in modo semplice per consentire calcoli su di essa.
- Forma prossima a quella della terra. – Sia definibile una geometria su di essa.
- Che esista una corrispondenza biunivoca tra la superficie terrestre e la superficie di riferimento in modo da poter proiettare un punto su di essa ed individuare la sua posizione planimetrica rispetto ad un sistema di coordinate curvilinee e che sia precisara una regola per definire lo scostamento tra le due in modo da avere la quota altimetrica del punto
Quando si arresta la procedura iterativa nel problema ai minimi quadrati non lineari? (Lezione 17-7)
Il processo iterativo si ferma quando la stima della varianza a posteriori non diminuisce più che di una piccola percentuale
Quando una livella torica è in bolla? (Lezione 28-5)
La livella torica è una fiala di vetro con una superficie interna toroidale che contiene in parte un liquido a bassa viscosità e basso punto di congelamento (etere o alcool, ad esempio). Poiché il liquido riempie solo parzialmente la fiala, nella pare più alta del toro si forma una bolla costituita prevalentemente da vapori del liquido. Il pelo libero fra il liquido e la bolla si dispone lungo la normale alla linea di forza del campo di gravità passante per la livella, quindi la tangente al centro della bolla si dispone sempre orizzontale. Centrare la bolla significa ruotare la livella finchè la mezzaria della bolla si porta sulla mezz’aria della graduazione incisa sulla fiala.
Quanto devono distare al massimo i ricevitori/antenne master e rover in un rilievo DGPS? Giustificare la
risposta. (Lezione 50-7)
Considerata la distanza dei satelliti GPS della terra, circa 22.000 Km, allora se i due ricevitori sono sufficientemente vicini (100 Km base-line max), i cammini di propagazione (path length) tra un satellite qualunque ed i due ricevitori possono essere considerati paralleli ed individuati da un versore ei. (^) Se i ricevitori sono sufficientemente vicini, gli errori da tutte le sorgenti eccetto quelli dovuti a multipath e al ricevitore (receiver noise and resolution), sono spazialmente correlati, cioè alcune sorgenti di errore producono gli stessi effetti in entrambi i ricevitori e possono quindi essere eliminati.
Sapendo che il legame funzionale fra la v.c Y e la v.c X è: Y=X^2 +X+5Calcolare il valore di Y per X=2 e la sua
varianza sapendo che la varianza di x è 4*10-^4 m^2 (Lezione 5-9)
MANCA LA RISPOSTA
Scrivere la definizione di distanza geodetica fra due punti (Lezione 27-4)
Considerati due punti A e B sulla superficie fisica della terra, si definisce distanza fra A e B la lunghezza dell’arco di geodetica che congiunge le proiezioni dei due punti A0 e B0 sull’ellissoide di riferimento. E’ quindi l’arco di sezione normale che congiunge le proiezione A0 e B
Scrivere la formulazione del teorema della geodesia operativa (Lezione 27-7)
I teoremi della Geodesia operativa affermano che: qualunque misura di azimut,angolo o distanza, eseguita con i mezzi a disposizione dei topografi può ritenersi eseguita con riferimento ad archi di geodetiche sulle superfici di riferimento che in ogni punto si ricorda hanno la normale coincidente con la normale sull’ellissoide