



Expressão Gráfica II
Unidade I - GEOMETRIA DESCRITIVA
EXPRESSÃO GRÁFICA
Departamento de
Material elaborado por:
Profª MSc.Andrea Faria Andrade
Curitiba, PR / 2011

















































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
DESENHO TÉCNICO
Tipologia: Notas de estudo
1 / 60

Esta página não é visível na pré-visualização
Não perca as partes importantes!
Material elaborado por: Profª MSc.Andrea Faria Andrade Curitiba, PR / 2011
Definição:
Gaspard Monge definiu a Geometria Descritiva como sendo a parte da Matemática que tem por fim representar sobre um plano as figuras do espaço, de modo a poder resolver, com o auxílio da Geometria Plana, os problemas em que se consideram as três dimensões.
Dizemos que uma figura F do espaço se projeta de um ponto C sobre um plano , que não contém o ponto C, quando determinamos, sobre o plano , as intersecções dos vários raios projetantes, determina- dos pelo centro de projeção C e pelos pontos da figura.
F 1 '
F '
F
C
F 1
De acordo com a posição ocupada pelo centro de projeção (finita ou no infinito), os sitemas de projeção classificam em:
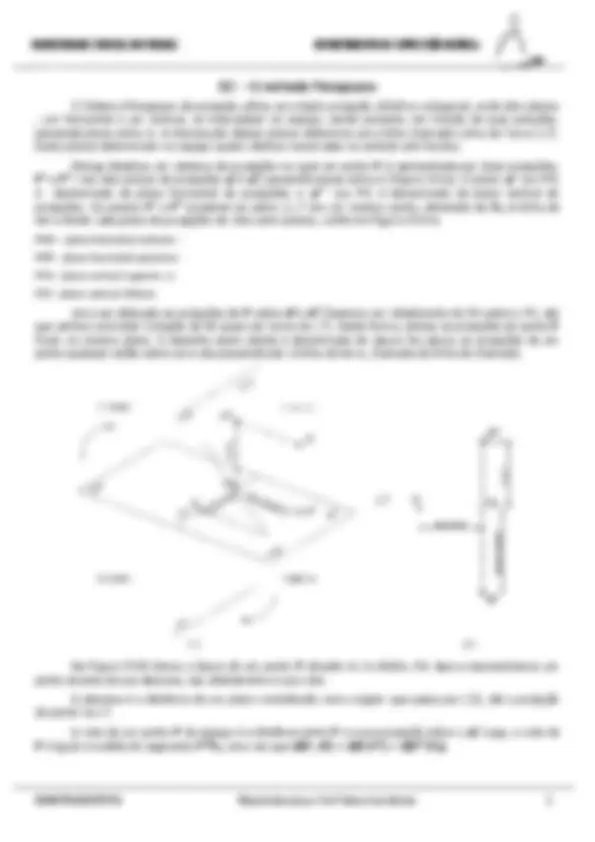
O Sistema Mongeano de projeção utiliza uma dupla projeção cilíndrico-ortogonal, onde dois planos , um horizontal e um vertical, se interceptam no espaço, sendo portanto, em função de suas posições,
Esses planos determinam no espaço quatro diedros numerados no sentido anti-horário.
Monge idealizou um sistema de projeções no qual um ponto P é representado por duas projeções,
terra divide cada plano de projeções em dois semi-planos, conforme Figura XXXXa:
PHA – plano horizontal anterior;
PHP - plano horizontal posterior;
PVS - plano vertical superior, e;
PVI - plano vertical inferior.
ponto qualquer estão sobre uma reta perpendicular à linha de terra, chamada de linha de chamada.
Na Figura XXXb temos a épura de um ponto P situado no 1o diedro. Em épura representamos um ponto através da sua abscissa, seu afastamento e sua cota.
P é igual a medida do segmento P”P 0 , uma vez que d(P, ’) = d(P,P’) = d(P”,P 0 ).
P é igual a medida do segmento P’P 0 , uma vez que d(P, ”) = d(P,P”) = d(P’,P 0 ).
Exercício 01:
Obter a épura dos pontos cujas coordenadas são dadas abaixo e identifique a sua posição o espaço.
A (1, 5, 3), está no __________B (3, 1, -4), está no _________
C (5, -2, -3), está no _________D (7, -5, 1), está no _________
E (8, 0, 2), está no __________F (9, 4, 0), está no __________
G (4, 0, 0), está no __________
Em geral, de acordo com sua posição em relação aos planos de projeção, as retas podem ser paralelas ou
1) Reta Horizontal
Essa reta é paralela ao Plano Horizontal de projeção e inclinada em relação ao Plano Vertical de projeção.
2) Reta de Topo
Essa reta é paralela ao PH e perpendicular ao PV.
3) Reta Fronto-Horizontal (Paralela à LT)
Essa reta é paralela ao PH e PV.
1) Reta Frontal
Essa reta é paralela ao Plano Vertical de projeção e inclinada ao Plano Vertical de projeção.
2) Reta Qualquer
A reta qualquer, por estar inclinada em relação aos planos de projeção PH e PV, não se projeta em verdadeira grandeza em nenhum desses planos.
Exercício 01:
pertencente a esta reta, tal que AB seja um segmento de 2cm.
Exercício 02:
Dada a reta a(A, B) e os pontos A(4, 1, 5) e B(4, 5, 2), pede-se:
a) o comprimento em mm de AB;
b) o ângulo que a reta faz com o PHP.
Exercício 03:
Representar a reta frontal f , pertencente a um ponto A(40, 15, 30) e que faz um ângulo de 45º com o plano horizontal de projeções. Representar o ponto B desta reta, tal que o segmento Ab seja de 20mm.
Exercício 01:
Representar a épura das retas a(A, B), b(C, D), c(E, F), defini-las quanto a posição no espaço, seus nomes e obter as projeções dos seus traços.
A(4, 1, 2) B(4, 4, 2) C(1, 2, 1) D(4, 2, 3) E(-3, -2, -2) F(0, -2, 3)
Exercício 02:
Dada a reta de perfil p(P, Q), encontrar as projeções dos traços horizontal e vertical da reta.
P(0, 3, 1) Q(?, 1, 3).
Exercícios Propostos
a) sua posição no espaço;
b) os traços horizontal e vertical da reta.
a) sua posição no espaço;
b) os traços horizontal e vertical da reta.
Exercício 02:
Verificar se o ponto A pertence à reta de perfil EF. E(4, 1, 5) F( 4, 5, 2) A(4, 4, 4)
Exercício 03:
Obter as projeções do ponto B, que pertence à reta EF do exercício anterior, e tem cota =3cm. B(?, ?, 3)
A solução de um problema pode ser facilitada quando pelo menos um de seus elementos ocupa uma posição particular (seja paralelo a um dos planos de projeção).
Para que, no método mongeano (dupla projeção ortogonal) uma figura ou objeto ocupe uma posi- ção desejada podemos recorrer a artifícios que visem deslocar a figura (ou objeto) ou deslocar o sistema de representação adotado. A estes artifícios denominamos, genericamente, de métodos descritivos, que são:
Rotação
Quando conservamos o sistema de representação adotado e giramos a figura (ou objeto), em torno de um eixo.
Mudança de Planos de Projeção
Quando a figura (ou objeto) é conservada e um dos planos de projeção (ou ambos) são substituí- dos, mantendo a ortogonalidade entre eles.
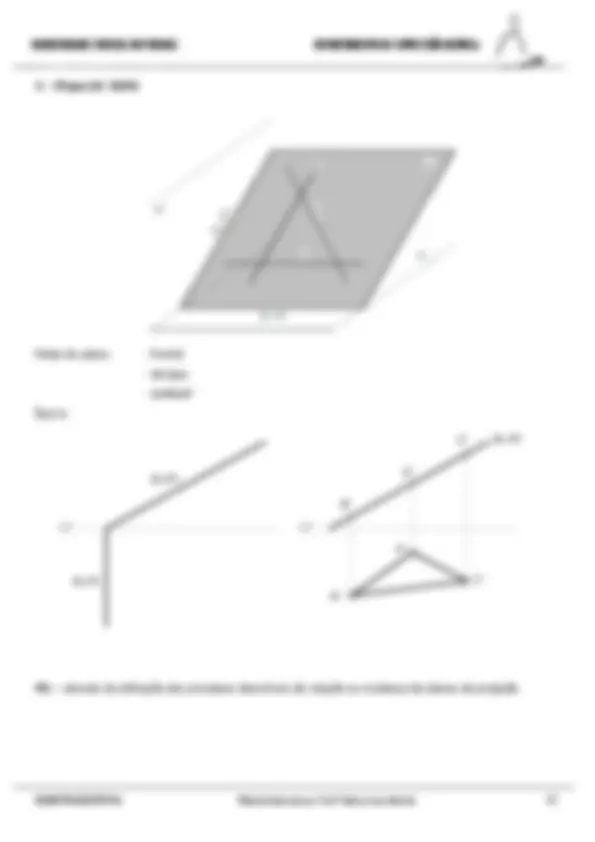
Quando um objeto possui uma face inclinada em relação aos planos principais de projeção, esta face não aparece em verdadeira grandeza.
Para obter a verdadeira grandeza desta face, é preciso projetá-la em um plano auxiliar que lhe seja paralelo. Para isso, é preciso mudar a posição de um dos planos de projeção, plano horizontal de projeção ou plano vertical de projeção, ou os dois; um após o outro; de forma que fique paralelo à face inclinada. Assim o objeto permanece fixo e os planos de projeção mudam de posição.
Fonte: adaptado de Barison. Disponível em:
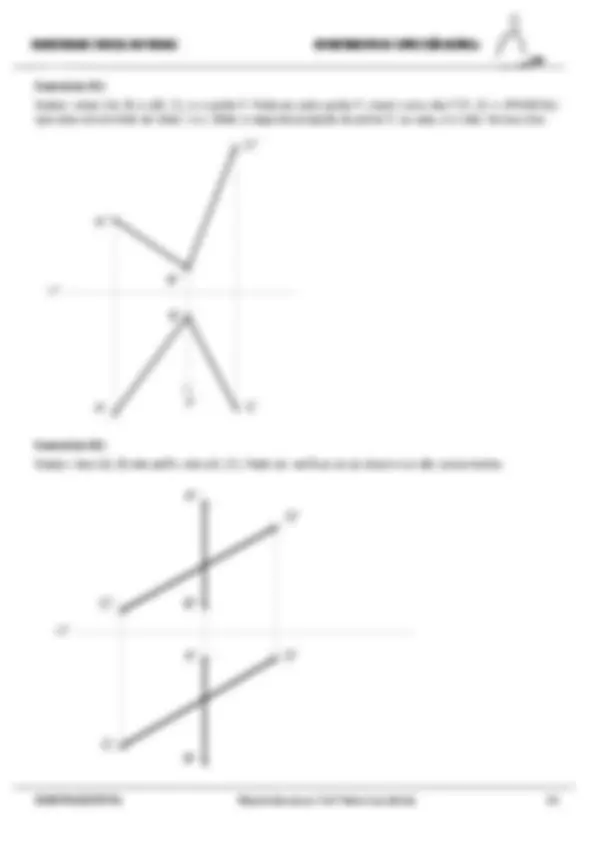
Exercício 03:
Tornar „vertical‟ a reta „qualquer‟ dada abaixo, utilizando o método da mudança de planos de projeção.
Exercícios Propostos
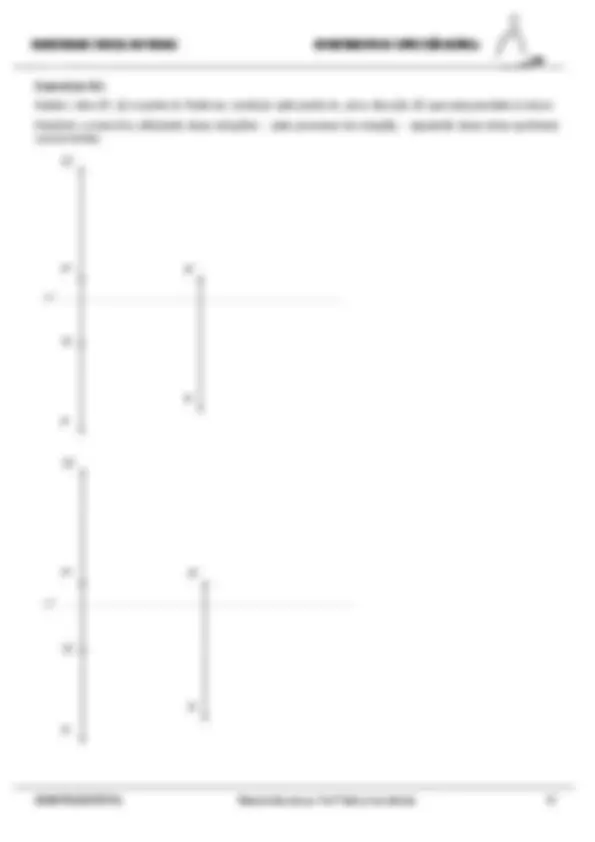
Exercício 01:
Submeter a reta „qualquer‟ dada ao processo de mudança de planos de projeção, de modo a torná-la uma reta „fronto-horizontal‟.
Exercício 02:
Dada a reta PQ = „qualquer‟ pede-se obter a distância em „mm‟ entre os pontos P e Q, utilizando o método da mudança de planos de projeção. P(10, 70, 20) Q(80, 10, 50)
Exercício 03:
Obter as projeções do ponto A, que pertence a reta do exercício anterior, e tem cota=3cm.
Exercício 04:
Tornar „de topo‟ a reta „qualquer‟ dada abaixo, utilizando o método da mudança de planos de projeção.