Baixe Apostila eletrotécnica e outras Manuais, Projetos, Pesquisas em PDF para Matérias técnicas, somente na Docsity!
Cooperativa escola dos alunos do Centro do Cedup “Dario
Geraldo Salles – COOPERSALLES”
DISCIPLINA DE PROTEÇÃO E
COMANDOS ELÉTRICOS
- PCF -
MÓDULO: II
Curso: Técnico em Eletrotécnica.
Nome: __________________________ Turma: ______
Autores : Luiz Carlos O. da Silva, Tirson Soares e Ademir J. dos Santos Joinville: Cedup, 201 5 /2.
Direitos autorais cedidos à Coopersalles, sendo que a elaboração da apostila é de inteira responsabilidade dos autores e coautores.
“DARIO GERALDO SALLES” – COOPERSALLES.
ITEM (^) SUMÁRIO/DESCRIÇÃO PÁGINA
1 MOTORES ELÉTRICOS.. 1.1. Tipos e características de motores................................................................................................................................................................................................................. 1.2. Ligação de motores................................................................................................................... 1.2.1. Motores monofásicos.............................................................................................. 1.2.2. Motores trifásicos................................................................................................... 1.2.3. Motores de doze bornes..........................................................................................
3 3 6 6 7 10 (^2) DISPOSITIVOS DE PROTEÇÃO E COMANDO ............................................................................... 2.1. Fusivel................................................................................................................................ 2.2. Rele Térmico..................................................................................................................... 2.3. Disjuntor-motor................................................................................................................ 2.4. Contator............................................................................................................................ 2.5. Temporizador eletrônico.................................................................................................. 2.6. Botoeiras, chaves manuais, chaves fim-de-curso e sinalizadores.....................................
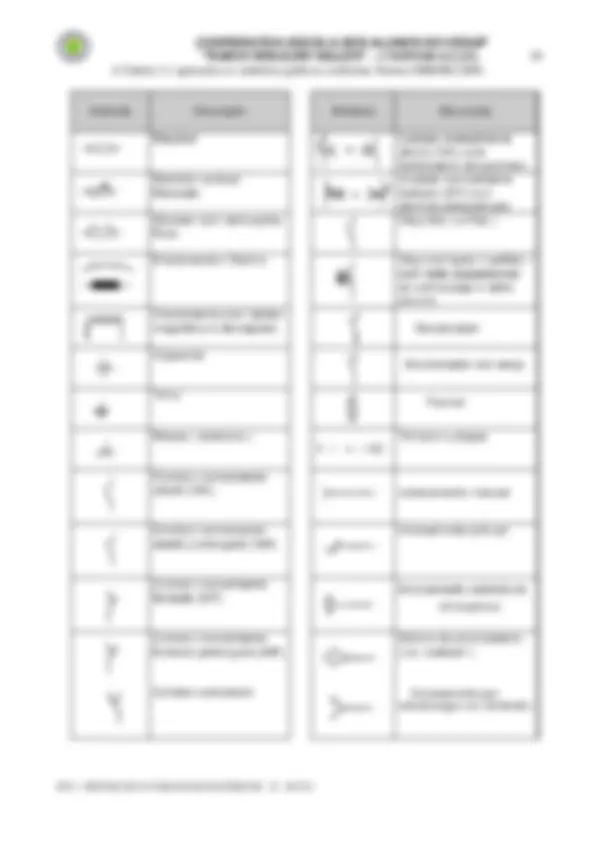
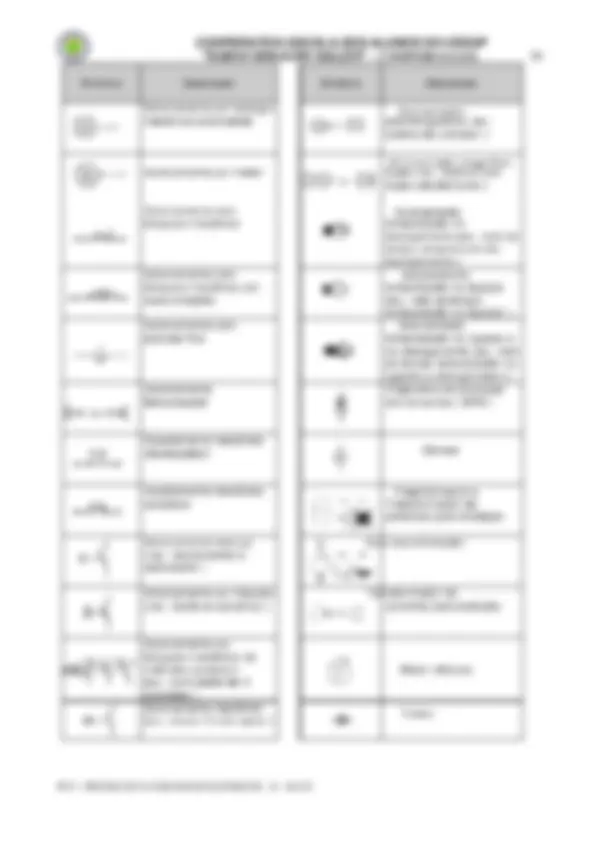
11 11 13 14 16 22 23 (^3) SIMBOLOGIA ......................................................................................................................................... 3.1. FUSÍVEL.............................................................................................................................. 3.2. RELÉ TÉRMICO.................................................................................................................... 3.3. DISJUNTOR - MOTOR............................................................................................................. 3.4. CONTATOR.......................................................................................................................... 3.5. TEMPORIZADOR.................................................................................................................. 3.6. BOTOEIRAS, CHAVES MANUAIS, CHAVES FIM-DE-CURSO E SINALIZADORES.....................
26 27 27 28 28 28 29 (^4) CHAVES DE PARTIDA ......................................................................................................................... 4.1. CHAVE DE PARTIDA DIRETA................................................................................................ 4.2. CHAVE DE PARTIDA DIRETA COM REVERSÃO DE ROTAÇÃO................................................ 4.2.1. CHAVE DE PARTIDA DIRETA COM REVERSÃO DE ROTAÇÃO MOTOR MONOFÁSICO............. 4.3. CHAVE DE PARTIDA ESTRELA-TRIÂNGULO......................................................................... 4.4. CHAVE DE PARTIDA COMPENSADORA.......... ...................................................................... 4.5. PARTIDA DE MOTOR DE DUAS VELOCIDADES (DAHLANDER)............................................. 4.6. CHAVE DE PARTIDA ESTRELA-TRIÂNGULO COM REVERSÃO............................................... 4.7. SEQUENCIA PARA SEMAFARO............................................................................................. 4.8. CHAVE DE PARTIDA ELETRÔNICA (SOFTSTARTER)............................................................. 4.9 INVERSOR DE FREQUENCIA................................................................................................
33 33 37 41 43 48 51 53 55 56 66 (^5) DIMENSIONAMENTO DE CHAVES DE PARTIDA ......................................................................... 5.1. NOMENCLATURA UTILIZADA.............................................................................................. 5.2. TABELA DE CARACTERÍSTICAS DE MOTORES...................................................................... 5.3. TABELA DE DISJUNTORES E RELÉS DE SOBRECARGA......................................................... 5.4. CURVA DE FUSÍVEIS............................................................................................................ 5.5. DIMENSIONAMENTO DA PARTIDA DIRETA..................................................................... .... 5.5.1. Corrente no trecho................................................................................. ................ 5.5.2. Dimensionamento do contator................................................................................ 5.5.3. Dimensionamento do relé térmico.......................................................................... 5.5.4. Dimensionamento de fusíveis de força................................................................... 5.5.5. Exemplo de dimensionamento................................................................................ 5.6. DIMENSIONAMENTO DA CHAVE DE PARTIDA ESTRELA-TRIÂNGULO................................. 5.6.1. Corrente nos trechos............................................................................................... 5.6.2. Dimensionamento dos contatores...................................................... .................... 5.6.3. Dimensionamento do relé térmico.......................................................................... 5.6.4. Dimensionamento de fusíveis................................................................................. 5.6.5. Exemplo de dimensionamento................................................................................ 5.7. DIMENSIONAMENTO DA CHAVE D E PARTIDA COMPENSADORA................................ ....... 5.7.1. Corrente nos trechos............................................................................................... 5.7.2. Dimensionamento dos contatores............................................................ ............. 5.7.3. Dimensionamento do relé térmico......................................................................... 5.7.4. Dimensionamento dos fusíveis de força................................................................. 5.7.5. Dimensionamento do autotransformador.............................................................. 5.7.6. Exemplo de dimensionamento............................................................................... 5.8. DEFEITOS EM CHAVES DE PARTIDA......................................................................
84 84 85 89 90 91 91 91 92 82 92 93 94 94 94 95 95 97 97 98 98 98 98 99 100 6 E 6.1 XERCÍCIOS. EXERCÍCIOS DE MOTORES............................................................................................................................. ELÉTRICOS.................................................................................................... 6.2. EXERCÍCIOS DE DISPOSITIVOS DE PROTEÇÃO E COMANDO..................................................... 6.3. EXERCÍCIOS DE SIMBOLOGIA................................................................................................... 6.4. EXERCÍCIOS DE CHAVES DE PARTIDA........................................................................................
6. 5. .EXERCÍCIOS DE DIMENSIONAMENTO DE CHAVES DE PARTIDA............................................... 6. 7. Teste de continuidade e polarização das bobinas de motores monásticos................................ 6.8.. Teste de continuidade e polarização das bobinas de motores trifásicos.................................
102 102 103 105 108 115 120 121 7 REFERENCIAS BIBLIOGRÁFICAS................................................................................................. 122
“DARIO GERALDO SALLES” – COOPERSALLES.
Os motores síncronos são motores extremamente caros, de difícil manutenção, mas possuem uma característica peculiar, sua velocidade é sempre constante, invariável com a carga. Esta velocidade, chamada de velocidade síncrona, é dada pela equação:
p
f
nS=
Onde nS é a rotação síncrona em rpm , f é a frequência em Hz e p é o número de pólos do motor. Estes motores só são utilizados em aplicações em que a velocidade deve ser extremamente constante, como em geração de energia, ou conversão de frequência de pequena potência. Os motores mais utilizados na indústria são os motores trifásicos assíncronos de rotor de gaiola. Recebem este nome porque seu rotor é constituído de lâminas de material ferromagnético entrepostas a uma armação de alumínio fundido que lembra uma gaiola. Isto proporciona um baixo custo de fabricação, com pouca manutenção e um ótimo desempenho. A Figura 1.2 mostra as partes constituintes de um motor de indução com rotor de gaiola.
Figura 1.2: partes de um motor de indução
A principal característica destes motores é que a velocidade varia com a carga aplicada. Quanto maior a carga, mais devagar gira o motor. A velocidade é dada em termos da velocidade de um motor síncrono de mesma frequência e número de pólos, ou seja, a velocidade síncrona. Com o motor a vazio, teoricamente a velocidade seria igual à síncrona, mas se deve lembrar que o próprio rotor, eixo e demais componentes girantes oferecem resistência ao motor, logo, sempre há uma perda de rotação. Esta perda é chamada de escorregamento e ocorre por causa da interação entre a força gerada pelos campos magnéticos e o conjugado resistente de carga. A expressão da velocidade de um motor assíncrono é:
“DARIO GERALDO SALLES” – COOPERSALLES.
120 s p
f n=
Onde s é o escorregamento em porcentagem. Podemos evidenciar a rotação síncrona nesta expressão:
s
n =nS
A expressão do escorregamento é:
S
S
n
n n
s=
Outra característica destes motores é a alta corrente de partida, ocasionada pela inércia do motor e da carga e que pode alcançar de 6 a 9 vezes a corrente nominal. Vale lembrar que a corrente de partida é dado de placa dos motores. Quando o motor parte a vazio, a corrente de partida é a mesma do que se partisse a plena carga, porém o tempo de partida a vazio é bem menor. Os motores também recebem classificações conforme a característica da sua curva de partida. Observe a Figura 1.3.
Figura 1.3: curvas de conjugado de motores
Os motores classe N são os mais comuns, porém possuem um menor conjugado de partida. Os das classes H e D são utilizados quando há a necessidade de fazer a partida com mais carga ou mesmo a plena carga. A Figura 1.4 mostra como a curva de conjugado é avaliada.
“DARIO GERALDO SALLES” – COOPERSALLES.
1.2. Ligação de motores
1.2.1. Motores monofásicos
Os motores monofásicos normalmente possuem dois enrolamentos principais e um circuito auxiliar de partida, composto por chave centrífuga, enrolamento auxiliar e capacitor. A Figura 1. mostra a representação dos bornes dos motores monofásicos.
Figura 1.5: Bobinas de motor monofásico
Para fazer a ligação em 110 V, os enrolamentos principais são ligados em paralelo, juntamente com o circuito auxiliar. Observe a Figura 1.6.
Figura 1.6: Ligação em paralelo de motor monofásico (110 V)
Em 220 V, os enrolamentos principais são ligados em série e o circuito auxiliar é ligado em paralelo com um dos enrolamentos. A Figura 1.7 traz esta ligação.
Figura 1.7: Ligação em série de um motor monofásico (220 V)
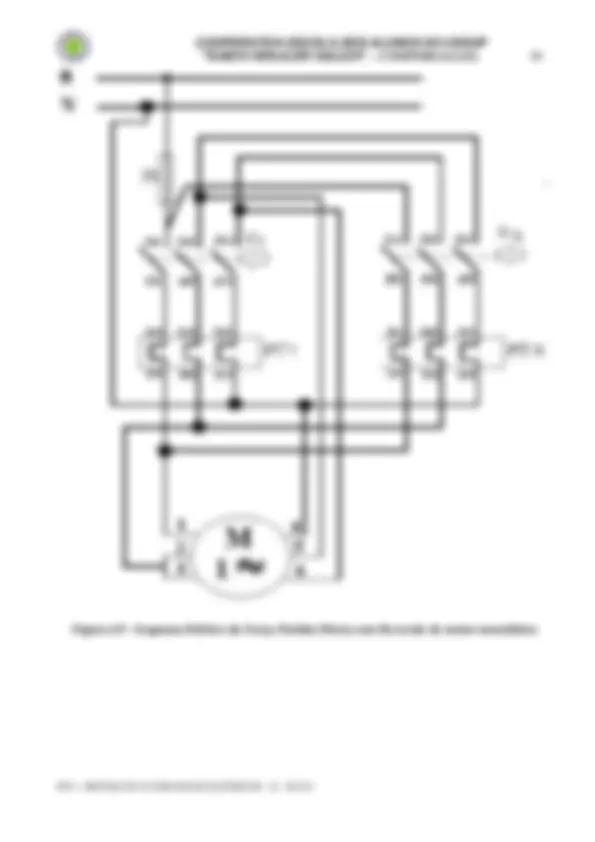
Para fazer a inversão de um motor monofásico, basta inverter os pólos do circuito auxiliar de partida, ou seja, trocar os bornes 5 e 8.
“DARIO GERALDO SALLES” – COOPERSALLES.
1.2.2. Motores trifásicos
Os motores trifásicos não necessitam de circuito auxiliar de partida e normalmente possuem um enrolamento por fase. A Figura 1.8 mostra a configuração dos bornes de um motor trifásico e as numerações que normalmente são encontrados em motores trifásicos.
1 2 3
4 5 6
U1 V1 W
U2 V2 W
R1 S1 T1^ R2^ S2^ T
Figura 1.8: identificação de enrolamentos para motores trifásicos.
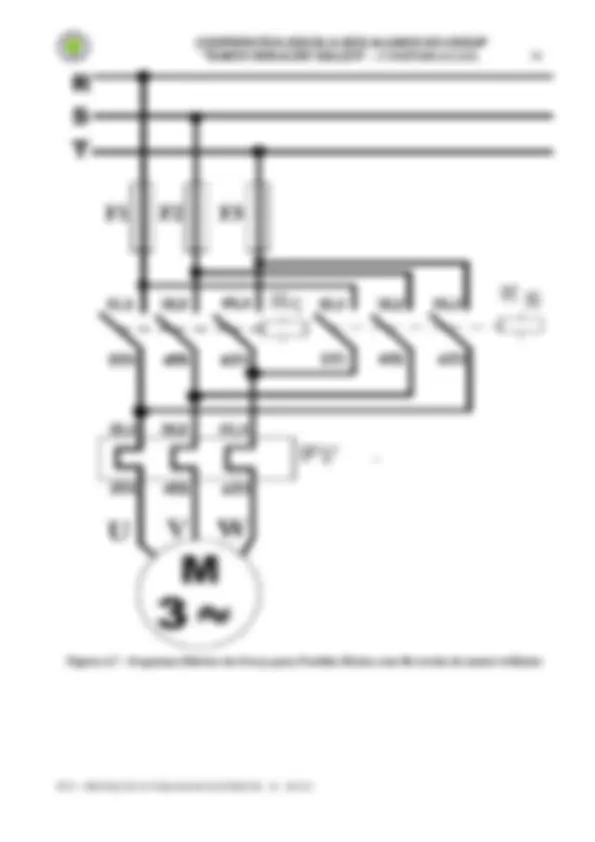
Existem duas formas básicas de ligação de um motor trifásico: estrela e triângulo. A Figura 1.9 traz a ligação estrela e a Figura 1.10 à ligação triângulo.
Figura 1.9: Ligação Estrela
“DARIO GERALDO SALLES” – COOPERSALLES.
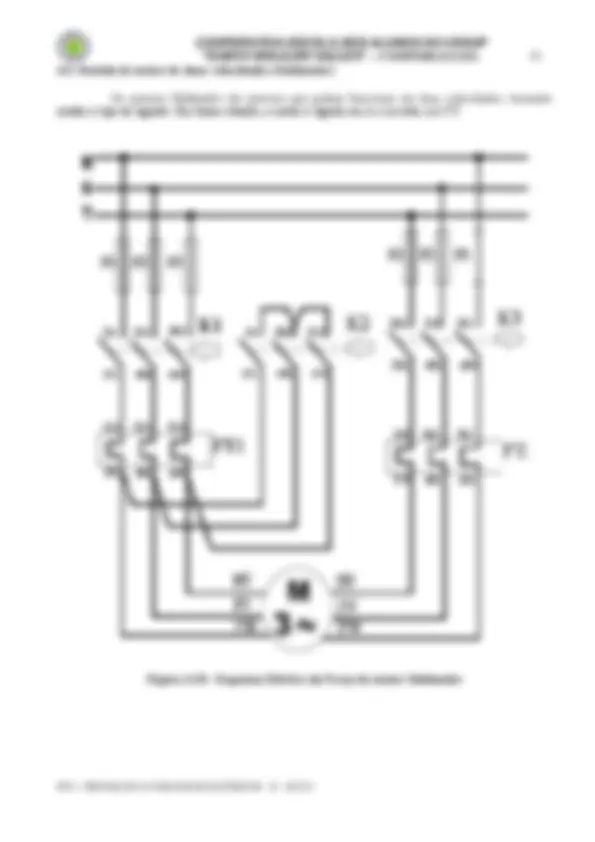
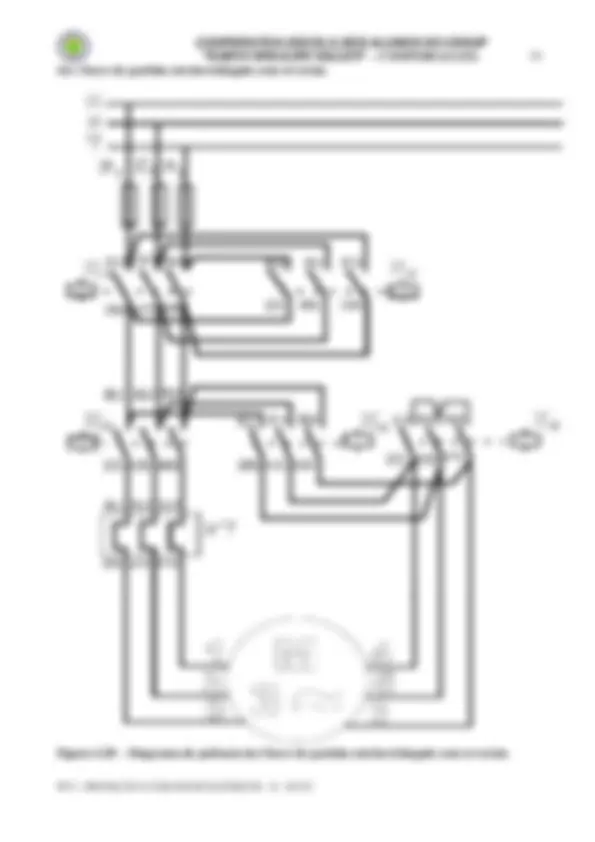
Figura 1.12: Ligação do motor de 12 bornes A ligação estrela série é usada apenas para fazer a partida série-paralelo, já que 760 V não é uma tensão padrão de rede. Normalmente, a ligação Δ série também tem esta finalidade.
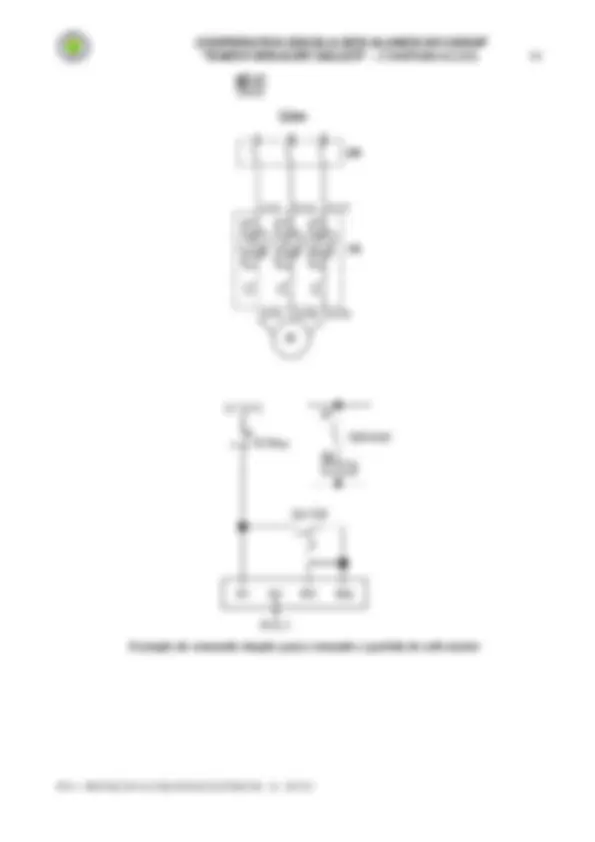
1.2.4 Motor Dahlander É um motor com enrolamento especial que pode receber dois fechamentos diferentes, de forma a alterar a quantidade de pólos, proporcionando, assim, duas velocidades distintas, mas sempre com relação 1:2. Exemplos: 4/2 pólos (1800/3600 rpm); 8/4 (900/1800 rpm)
Figura 1.13: Ligação e bobinas do motor de Dahlander
“DARIO GERALDO SALLES” – COOPERSALLES.
2. Dispositivos de proteção e comando
A instalação de máquinas diversas requer uma grande gama de dispositivos que possibilitem o perfeito funcionamento, de preferência o mais automatizado possível, com proteção em caso de falhas. Os quadros de comando proporcionam essa confiabilidade, além de garantir uma maior segurança ao operador da máquina, já que o mesmo não estará em contato direto com a alimentação de força da máquina. O acionamento é remoto, através de chaves que se encontram fora do painel de comando, não havendo necessidade de se abrir o painel para ligar ou desligar uma máquina. Além disso, o equipamento fica protegido contra eventuais problemas causados por fatores diversos, como sobrecarga, curto-circuito ou erro de operação. Os painéis de comando baseiam-se na abertura e fechamento de chaves elétricas chamadas de contatos. Estes contatos são comandados de diversas formas, manualmente, mecanicamente, magneticamente etc. São formados por um contato móvel que faz a ligação entre dois contatos fixos, que formam os bornes do contato. Há três tipos de contatos: normalmente fechado (NF ou NC), normalmente aberto (NA ou NO) e reversor. Possuem duas posições, de repouso ou acionados. A Tabela 2.1 faz um resumo dos contatos e seus estados nas posições normais e atuado.
Posição Contato NA Contato NF Contato reversor
Normal ou repouso
Atuado
Tabela 2.1: Tipos de contatos
2.1. Fusível
O fusível é um dispositivo de proteção contra as correntes de curto-circuito. Sua atuação é baseada no elemento fusível, que é um condutor geralmente de cobre, prata ou estanho, de pequena seção que se funde ao ser atravessado por uma corrente de valor maior que a estipulada pela sua curva de atuação. Os fusíveis de uso industrial, para correntes maiores, são feitos de um corpo cerâmico ladeado por placas metálicas, os contatos, que estão ligadas pelo elemento fusível. No interior do corpo cerâmico há areia de quartzo envolvendo o elemento fusível, cuja função é de extinguir o arco elétrico criado pela queima do fusível. Também possuem uma chapa ou pino colorido, que indica quando o fusível atua. Os fusíveis podem ser classificados:
Quanto à capacidade de interrupção: em fusíveis retardados, para proteção de motores e máquinas em geral, ou ultrarrápidos, para proteção de equipamentos eletrônicos sensíveis; Quanto ao nível de tensão: de baixa ou alta tensão; Quanto à forma construtiva: diazed (diametral) ou NH. Os fusíveis de efeito retardado são fabricados para suportar uma corrente maior que sua corrente nominal durante um certo tempo. Assim, durante a partida de um motor, em que a corrente
“DARIO GERALDO SALLES” – COOPERSALLES.
Os fusíveis NH são fabricados de 4 até 630 A. Por questões econômicas, sempre que possível, é preferível que se use fusíveis Diazed.
2.2 Relé térmico
Também chamado de relé de sobrecarga ou bimetálico, seu funcionamento baseia-se no princípio da dilatação térmica dos metais. A cada fase é ligado um componente chamado bimetálico, que consiste em duas lâminas de metais diferentes soldadas entre si. Quando a corrente percorre o relé térmico, as lâminas, por efeito Joule aquecem e se dilatam. Como os metais são diferentes, a dilatação também é diferente, fazendo com que as lâminas se enverguem. Como a temperatura é função direta da intensidade de corrente que circula, pode-se fazer uma relação entre a corrente e o ângulo de desvio do bimetálico. Assim, através de um mecanismo de disparo, é possível fazer com que o relé térmico desarme o circuito quando a corrente ultrapassar um determinado valor. Este valor é chamado de corrente de sobrecarga, que é um fenômeno que ocorre em motores que trabalham em condições anormais, como sobrecarga mecânica no eixo, tempo de partida muito alto, rotor bloqueado, falta de fase e outros. O motor nestas condições tende a se aquecer em demasia, provocando degradação do material isolante das bobinas e consequentemente a queima por curto-circuito. A Figura 2.3 mostra um esquema dos componentes de um relé térmico trifásico.
“DARIO GERALDO SALLES” – COOPERSALLES.
Figura 2.3: Esquema de um relé térmico Quando a corrente que circula pelo bimetálico é a nominal do motor (abaixo do ajuste) os bimetálicos sofrem uma deflexão, mas não suficiente para o desarme. Quando a corrente aumenta, a deflexão também aumenta e o mecanismo de disparo é ativado, ocorrendo o desarme do relé. Esse valor de corrente pode ser regulado através de um botão giratório. Normalmente os relés térmicos possuem dois contatos, um aberto e um fechado, e possuem a opção de rearme automático ou manual e botão de teste.
Figura 2.4- Relé de proteção térmica para motores
2,3 Disjuntor . Os disjuntores são dispositivos de seccionamento e proteção contra sobrecarga e curto- circuito. O dispositivo de proteção contra sobrecarga consiste em bimetálicos, cujo funcionamento já foi descrito na seção sobre os relés térmicos.
“DARIO GERALDO SALLES” – COOPERSALLES.
Normalmente, os disjuntores-motor possuem acionamento por alavanca rotativa e indicação de disparo (TRIP). A Figura 2.5 mostra um disjuntor MPW25 da WEG, entre outros.
Figura 2.5- Disjuntor MPW da WEG, entre outros
O disjuntor-motor MPW é uma solução compacta para proteção do circuito elétrico e partida/proteção de motores até 20cv, 380V/440V. Possui alta capacidade de interrupção, permitindo sua utilização mesmo em instalações com elevado nível de corrente de curto-circuito. Assegura total proteção ao circuito elétrico e ao motor através de seus disparadores térmico (ajustável para proteção contra sobrecargas e dotado de mecanismo diferencial com sensibilidade a faltas de fase) e magnético (calibrado em 12xIn para proteção contra curtos-circuitos).
“DARIO GERALDO SALLES” – COOPERSALLES.
Seu acionamento é rotativo e possui indicação de disparo (TRIP), permitindo ao operador a visualização do desligamento manual do disjuntor ou de seu disparo via mecanismo de proteção. A manopla de acionamento pode ser bloqueada com cadeado ou similar na posição "desligado", garantindo assim segurança em manutenções.
Figura 2.6 Componente e acessória para disjuntor motor
2.4 Contator Por definição, o contator é uma chave de operação eletromagnética, com uma única posição de repouso e é capaz de estabelecer, conduzir e interromper correntes em condições normais no
“DARIO GERALDO SALLES” – COOPERSALLES.
Normalmente os contatores possuem apenas um ou nenhum contato auxiliar, mas outros contatos podem ser adicionados através de encaixes específicos na superfície superior ou lateral do contator. São os chamados blocos de contatos, que podem ser contatos individuais abertos ou fechados ou contatos conjugados, um aberto e um fechado. Há outros acessórios para contatores, como: bloco pneumático temporizado, que faz um comando temporizado regulável; dispositivo de inter-travamento, que impede mecanicamente que dois contatores sejam ligados ao mesmo tempo; bloco de retenção mecânica, que impede o contator de se desligar em caso de queda brusca de tensão e outros. Os contatores possuem características específicas para cada aplicação. Assim, um contator que faz a partida de um motor de um torno pode não ser o mesmo que aciona o motor de uma esteira, mesmo que os motores tenham características idênticas. Isto se deve ao fato dos contatores sofrerem um desgaste dos seus contatos a cada acionamento. Logo, o tipo de carga e a frequência de manobras influem diretamente sobre o desgaste dos contatos. Este desgaste se dá pela ação dos arcos elétricos criados com o fechamento e principalmente abertura dos contatos, provocando eletro-erosão do material da superfície dos contatos. Como a eletro- erosão ocorre de maneira aleatória, a superfície dos contatos torna-se irregular, provocando aumento da resistência elétrica nos contatos e aquecimento. Pode acontecer mesmo dos contatos atingirem temperaturas tão altas que acabam se fundindo e soldando-se, impedindo a abertura do contator.
Figura 2.7 - Contator e acessórios. Assim, é importante aplicar cada tipo de contator corretamente, conforme sua categoria de emprego. Para cargas menores, podem ser utilizados os mini contator, que é um dispositivo similar a um contator comum, porém é utilizado no chaveamento de cargas mais baixas. Já é conhecido que relés e contatores são dispositivos praticamente idênticos em seu funcionamento, variando apenas no tipo de carga que são utilizados para chavear.
“DARIO GERALDO SALLES” – COOPERSALLES.
Figura 2.8 - mini contator e mini contator para reversão. Também pode ser utilizados os relés auxiliar, também conhecido como mini relé ou micro relé , pois devido ao seu baixo custo muitos montadores de painéis e fabricantes de maquinas tendem a utiliza-lo em seus projetos. A principal vantagem dos relés em relação aos mini contatores, é que os relés na maioria das aplicações industriais possuem base (soquete), o que facilita em muito sua manutenção, gerando economia de espaço em máquinas e painéis elétricos, esse relés são do ponto de vista de funcionamento e desempenho, idênticos aos relés industriais de tamanho normal e operam nas mesmas condições de corrente e tensão de alimentação.
Figura 2.9 - relé auxiliar.
Em outras situações, como por exemplo, acionamentos de cargas resistivas elevadas podem ser utilizados contatores que utilizam o principio SSR, também conhecidos por relé de estado sólido , eles apresentam uma vida útil elevada, além da ausência de aro elétrico, estes componentes são muito utilizados para alimentação de resistências de aquecimento, devido a quantidade de manobras (ligar e desligar) que são exigidos.
Figura 2.10 - relé auxiliar SSR. Os contatores WEG CWM25C, CWM32C, CWM50C e CWM65C foram desenvolvidos especialmente para manobra de capacitores para correção de fator de potência (categoria de emprego AC-6b). Sua utilização possibilita o desempenho necessário para este tipo de aplicação.