Baixe Balanceamento e outras Notas de estudo em PDF para Engenharia Mecânica, somente na Docsity!
BALANCEAMENTO DE ROTORES RÍGIDOS
DEFINIÇÕES
- ROTOR
: componente de máquina operando com rotação
Ω^ em torno de
um eixo que passa pelos mancais. - ROTOR
RÍGIDO
:^ Se
Ω^ de
operação
é^ MENOR
que
a^ primeira
das
frequências naturais do rotor ele pode ser considerado rígido para efeito debalanceamento. - DESBALANCEAMENTO
: Produto da massa do rotor pela excentricidade
do seu centro de massa em relação ao eixo de rotação:
d = m e
[kgm]
BALANCEAMENTO DE ROTORES RÍGIDOS
F: força HARMÔNICA produzida pelo desbalanceamentod quando o rotor gira: módulo |
F | = d
m e^ Ω
2 com direção que
acompanha a rotação, contida num plano perpendicular aoeixo que passa pelos mancais Fd m e Ω t^
Ref.
2^ j^ t cos^ (^ ) (^ )
d x^
d y^ t d F^ me
e F^
F^
t
F^
F^ sen
t
Ω = Ω=^
=^
x y
Fd m e Ω t^
Ref.
rc mc Fb
BALANCEAMENTO:
operação
de^
ADIÇÃO
ou
RETIRADA
de^
massa
do^
rotor,
no^
plano
que
contém o desbalanceamento, que anula a forçacentrífuga de desbalanceamento: F
= Fd b
m r^ c^ c
d^
m e =^
=
BALANCEAMENTO DE ROTORES RÍGIDOS ROTORES CURTOS:
COMPRIMENTO
<<^ DIÂMETRO. Exemplos: roda
de automóvel, rebolo de retificadora.
Neste caso
a^ ≈^ b
Î^
d= d^1
≈^ d/2 2
MÉTODO ESTÁTICO: (
Ω^ = 0)
sobre mancais de baixo atrito a parte
pesada
do
rotor
fica
para
baixo
Î^
a^ posição
angular
( θ )
do
a^ desbalanceamento é determinada. Por tentativa adiciona-se massa do ladooposto até que o equilíbrio seja alcançado. Fdb Fc^
Fc
EQUILÍBRIO:
2 1
2
2
2
2
1 1
1
2 2
(^22)
1
2 1
(^21)
2
1
2
0 0 :^
d^
c^
c
c^
c c^
c c c
c^
c
F^
F^
F^
F^
d
F^
F
M^
a F^
b F
como a
b
m r^
d^
m r^
d
F^
F^
d^
d^
d
=^
⇒^
=^
+^
=^ Ω
=^
Ω^ =
=^
Ω^ =
=^
⇒^
≈^
→^
≈^
→^
=^
m^
m
BALANCEAMENTO DE ROTORES RÍGIDOS
MÉTODO
DINÂMICO
( Ω b
≠^ 0):
São
utilizados
sensores
para
medir
a
vibração produzida pelo desbalanceamento, COM O ROTOR MONTADONUMA SUSPENSÃO ELÁSTICA (MANCAIS ‘MOLES’) tal que
Ω >b^
ω .n
x(t) r(t)
d Ω b^ Fd
São medidos: X e
θ
ROTOR CURTO -^ X^ –^ amplitude da vibração medida pelo sensor no mancal^ θ^ –^ ângulo entre x(t) máximo e a marca de referência
SISTEMA DE 1 GDL: x
(t) = x 1
(t) = x(t) 2 (lâminas flexíveis têm K
<< Kxx
)yy
X^ θ
T T
t t
BALANCEAMENTO DE ROTORES RÍGIDOS
ROTOR CURTO -
MÉTODO DINÂMICO (
Ω ≠b^
- tal que
Ω >b^
ω .n
Pode-se evitar a necessidade do conhecimento prévio da
massa do rotor
Basta
realizar
um
SEGUNDO
ensaio
com
massa
conhecida
(mc
rc:
instalada, por exemplo, na posição da marca de referência). Desta maneira odesbalanceamento do rotor é
alterado.
Primeiro experimento, com
Ω : (rotor original)b^
Î^ X
,^ θ o o
Segundo experimento, com
Ω : (rotor original +b^
mc rc
)^ Î^ X
,^ θ 1 1
Xo θ o ref
θ^1
ref
X
Xo θ o ref θ^1 X^1
X- X^1 o
1
1
o
o o
X^ X^ o
mc rc
X d^
mc rc X^ X
X^
d
−^
→
⇒^
=^ −
→
BALANCEAMENTO DE ROTORES RÍGIDOS
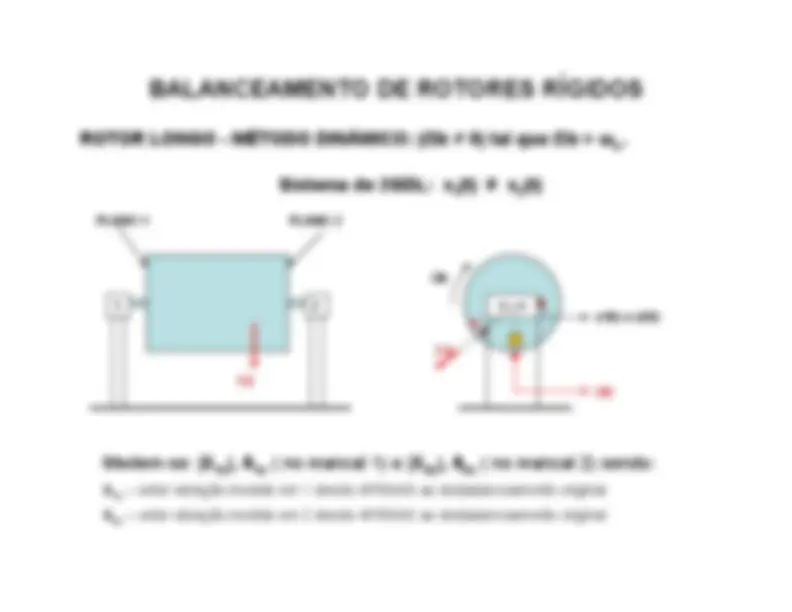
ROTOR LONGO -
MÉTODO DINÂMICO: (
Ω b^ ≠
- tal que
Ω b >
ω .n^ x1(t) e x2(t)^ r(t)
d Ω b^ Fd
1
2
PLANO 1
PLANO 2 Fd
Sistema de 2GDL: x
(t)^ ≠ 1
x(t)^2
Medem-se: |
X|,^ 1o
θ ( no mancal 1) e |1o^
X|,^ 2o
θ ( no mancal 2) sendo:2o^
X–^ vetor vibração medido em 1 devido APENAS ao desbalanceamento original1o^ X–^ vetor vibração medido em 2 devido APENAS ao desbalanceamento original2o^
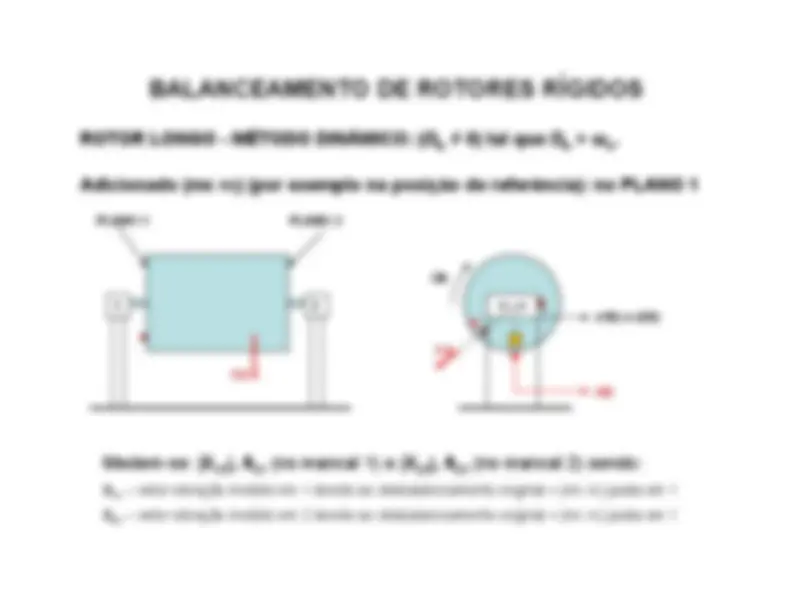
BALANCEAMENTO DE ROTORES RÍGIDOS
ROTOR LONGO -
MÉTODO DINÂMICO: (
Ω ≠b^
- tal que
Ω >b^
ω .n^ x1(t) e x2(t)^ r(t)
d Ω b^ Fd
1
2
PLANO 1
PLANO 2 Fd
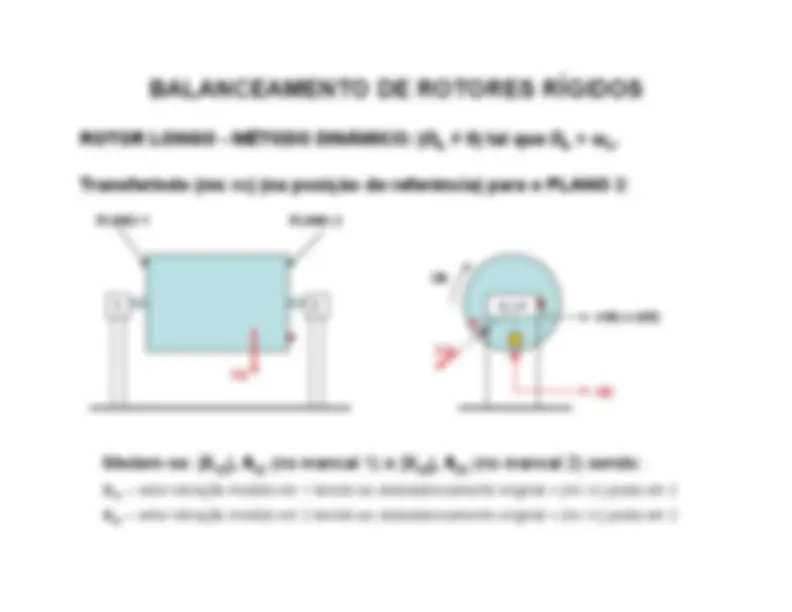
Transferindo (mc rc) (na posição de referência) para o PLANO 2
Medem-se: |
X|,^12
θ (no mancal 1) e |^12
X|,^22
θ (no mancal 2) sendo:^22
X–^ vetor vibração medido em 1 devido ao desbalanceamento original + (mc rc) posta em 2^12 X–^ vetor vibração medido em 2 devido ao desbalanceamento original + (mc rc) posta em 2^22
BALANCEAMENTO DE ROTORES RÍGIDOS
ROTOR LONGO -
MÉTODO DINÂMICO: (
Ω ≠^ b^
- tal que
Ω >b^
ω .n
Com os vetores medidos:
X, X1o
, X2o^11
, X, X^21
, X 1222
, calculam-se:
Efeitos diretos: (fatores de escala) X- X^11
= efeito de 10
(mc rc)
posta em
1 sobre a vibração medida em
1
X– X^22
= efeito de 20
(mc rc)
posta em
2 sobre a vibração medida em
2
Efeitos Cruzados: (fatores de escala) X- X^12
= efeito de 10
(mc rc)
posta em
2 sobre a vibração medida em
1
X– X^21
= efeito de 20
(mc rc)
posta em
1 sobre a vibração medida em
2
Sejam
mr^1
(colocada no PLANO 1) e 1
mr^2
(colocada no PLANO 1) as 2
CORREÇÕES do desbalanceamento do rotor.
(mr^1
)^ produz a vibração 1
Qmedida^1
no mancal 1
(mr^2
)^ produz a vibração 2
Qmedida^2
no mancal 2
BALANCEAMENTO DE ROTORES RÍGIDOS
ROTOR LONGO –
PROGRAMA NO MATLAB
% Balanceamento de rotor rígido: valores do LAB7 % desbalanceamento original nos planos 1 e 2: % nível de vibração (v)
e fase (t) em graus
M=15000;
%^ massa
do^ rotor
em^ gramas
w=13;^
%^ rotação
de^ balanceamento
Hz
%^ massa(gramas)
e^ do^
raio(mm)
de^ tara:
Mt^ =10.0; Rt^ =75; %^ Medidas
SEM^
massa^
de^ tara
[mm/s]
v10=7.5; t10=20; v20=3.0; t20=4; %^ Medidas
com^
massa^
de^ tara
no^ plano
1:
v11=8.0; t11=60; v21=3.4; t21=30; %^ Medidas
com^
massa^
de^ tara
no^ plano
2:
v22=5.5; t22=80; v12=7.5; t12=60;
%^ vibrações
na^ forma
complexa
gtr^ =pi/180; v10=v10cos(t10gtr)
+iv10sin(t10*gtr);
v20=v20cos(t20gtr)
+iv20sin(t20*gtr);
v21=v21cos(t21gtr)
+iv21sin(t21*gtr);
v22=v22cos(t22gtr)
+iv22sin(t22*gtr);
v11=v11cos(t11gtr)
+iv11sin(t11*gtr);
v12=v12cos(t12gtr)
+iv12sin(t12*gtr);
a=[v11-v
v12-v v21-v
v22-v20];
%^ escala=influência
v=[-v10^ -v20];
%^ (-)^
aditivas
q=^ inv(a)v; m=^ abs(q)mt;
%^ massas
de^ correção
teta^
=atan2(imag(q),real(q))*180/pi; Massas ADITIVAS de correção para rt = 75.0 mm PLANO1: m
= 11.85 gramas 1
teta^1
= 68.7 graus
PLANO2: m
= 2.77 gramas 2
teta^2
= 99.7 graus
θ^ POSITIVOS no sentido da rotação
BALANCEAMENTO DE ROTORES RÍGIDOS
DESBALANCEAMENTO RESIDUAL
Feitas as CORREÇÕES, são medidos
Xe^1
X(níveis de vibração residuais^2
nos mancais 1 e 2) na rotação
Ω .b
Para calcular os desbalanceamentos RESIDUAIS: Método 1
: considera que cada mancal responde como um sistema independente de 1 GDL :
1
1
2
2 (^1 2) r
d^ M X
e^
d^ M X d^ d
d =^
=^ +
Método 2
: considera os fatores de escala diretos determinados na medição:
11 1
22
2
1
1
2
2
1
2
1
2
11 1
22
2
o^
o
o^
o
X^ X
mc rc^
X^
X^
mc rc
X^
d^
X^
d
X^ mc rc
X^ mc rc
d^
d
X^ X
X^
X
−^
→^
−^
→
→^
→
=^
=
−^
−^
(^1 2) r d^ d
d = +
BALANCEAMENTO DE ROTORES RÍGIDOS
QUALIDADE DE BALANCEAMENTO REQUERIDA PORCLASSE DE EQUIPAMENTO NBR14R / ISO 1940 GRA^
TIPO DE EQUIPAMENTO
630
Eixos de motores de grande porte, tipo diesel ou gasolina, com em fundações rígidas 250
Eixos de motores diesel com 4 cilindros (velocidades de pistão inferiores a 9 m/s). 100
Eixos de motores diesel com 6 ou mais cilindros; Motores completos (diesel e gasolina ) deveículos automotivos e de locomotivas (velocidades de pistão inferiores a 9 m/s). 40
Rodas de veículos, Eixos de motores alternativos que operam em rotações elevadas(velocidades do pistão maiores ou iguais a 9 m/s) 16
Eixos Cardan, Componentes de máquinas agrícolas, Componentes de motores de combustàointerna, Discos de freio.
Rotores de equipamentos de processamento na indústria química e de alimentos; Redutoresde turbinas marítimas, Ventiladores, Volantes de inércia , Rotores de bombas hidráulicas,Componentes de máquinas de usinagem, Motores elétricos convencionais, Componentes demotores alternativos especiais.
Turbinas a gás e a vapor, Rotores de turbo-geradores e de turbo-compressores, Motores demáquinas ferramenta, Motores elétricos de médio porte, Mini motores elétricos, Bombasacionadas por turbinas. 1
Motores de gravadores e toca-discos, Rotores de máquinas de retificar, pequenos motoreselétricos com requisitos especiais
0.^
Discos rígidos, Giroscópios, Rotores de máquinas de retificar de precisão.
BALANCEAMENTO DE ROTORES RÍGIDOS
DESBALANCEAMENTO RESIDUAL ADMISSÍVEL ( g.mm/Kg)
(PARCIAL) NBR14R / ISO 1940 Ωop [RPM]
GRAU DE QUALIDADE DE BALANCEAMENTO 0.4 1.
16
40
100
250
40
-^ - -^ -
3800
9600
24000
60000
63
-^ -^ -
2400
6000
15000
38000
100
-^ - -^600
1500
3800
9600
24000
160
-^ -^380
960
2400
6000
15000
250
-^ -
96
240
600 150
(^38000) 9600
400
-^24
60
150
380 960
2400
6000
630
6 15
38
96
240 600
1500
3800
1000
3.8^ 9.
24
60
150 380
960
2400
1600
2.^
6
15 38
96
240
600
1500
2500
1.5^ 3.
24
60 150
380
4000
0.^ 2.^
6 15
38
96
240
6300
0.6^ 1.
9.^
24 60
150
10000
0.38^ 0.
6
15 38
-^
25000
0.15^ 0.
2.^ -^ -^ -^
40000
0.^ 0.^ 0.^ -^ -^ -^ -^
63000
0.^ 0.^ -^ - -^ -^ -^
EXEMPLO
Rotor de turbina a gás Operação: 4000 RPM Qualidade: G 2.5 Massa: M = 1000 kg DRA = 6 g.mm/kg^ d
<^ r
DRA
x^ M d< 6000 gmmr^