Baixe CLPs - Blocos Lógicos e outras Notas de estudo em PDF para Automação, somente na Docsity!
FUMEP – Fundação Municipal de Ensino de Piracicaba
EEP – Escola de Engenharia de Piracicaba
COTIP – Colégio Técnico Industrial de Piracicaba
CONTROLADORES LÓGICO
PROGRAMÁVEIS – BLOCOS LÓGICOS
Prof. Msc. Marcelo Eurípedes da Silva
Piracicaba, 14 de Fevereiro de 2006
MES - 14/02/2006 - Página 2-
Capítulo 1 - Introdução
O objetivo deste curso é o de estudar os Controladores Lógicos Programáveis (CLPs), que são elementos essenciais na Automação Industrial. Juntamente com os Softwares supervisórios os CLPs comandam todos os sensores e atuadores em um sistema fabril. Basicamente existem dois tipos de aplicações para estes controladores, a primeira em sistemas discretos tais como painéis de controle de motores, ou de sistemas pneumáticos. A segunda é em industrias de Processos, onde se usam entradas e saídas Analógicas. A ênfase deste curso será dada em sistemas discretos, que consistem na grande maioria das aplicações industriais.
1.1) Definição dos CLPS
Os CLPs ou Controladores Lógico Programáveis podem ser definidos, segundo a norma ABNT, como um equipamento eletrônico-digital compatível com aplicações industriais. Os CPLs também são conhecidos como PLCs, do inglês: Programmable Logic Controller. O primeiro CLP data de 1968 na divisão de hidramáticos da General Motors. Surgiu como evolução aos antigos painéis elétricos, cuja lógica fixa tornava impraticável qualquer mudança extra do processo. A tecnologia dos CLPs sõ foi possível com o advento dos chamados Circuitos Integrados e da evolução da lógica digital. Trouxe consigo as principais vantagens: a) fácil diagnóstico durante o projeto b) economia de espaço devido ao seu tamanho reduzido c) não produzem faíscas d) podem ser programados sem interromper o processo produtivo e) possibilidade de criar um banco de armazenamento de programas f) baixo consumo de energia g) necessita de uma reduzida equipe de manutenção h) tem a flexibilidade para expansão do número de entradas e saídas i) capacidade de comunicação com diversos outros equipamentos, entre outras
MES - 14/02/2006 - Página 4-
Figura 1.1 – Ciclo de Varredura de um CLP
Verifica o estado das entradas: Lê cada uma das entradas, verificando se houve acionamento. O processo é chamado de ciclo de varredura.
Campara com o programa do usuário: Através das instruções do usuário sobre qual ação tomar em caso de acionamento das entradas o CLP atualiza a memória imagem das saídas.
Atualiza as saídas: As saídas são acionadas ou desativadas conforme a determinação da CPU. Um novo ciclo é iniciado.
1.4) Estrutura Básica de um CLP
Fonte de alimentação: Converte a tensão da rede de 110 ou 220 VCA em +5VCC, +12VCC ou +24VCC para alimentar os circuitos eletrônicos, as entradas e as as saídas.
INICIO
VERIFICA O ESTADO DAS ENTRADAS
TRANSFERE OS DADOS PARA MEMÓRIA
COMPARA COM O PROGRAMA DO USUÁRIO
ATUALIZA AS SAÍDAS
INICIOINICIO
VERIFICA O ESTADO DAS ENTRADAS
VERIFICA O ESTADO DAS ENTRADAS
TRANSFERE OS DADOS PARA MEMÓRIA
TRANSFERE OS DADOS PARA MEMÓRIA
COMPARA COM O PROGRAMA DO USUÁRIO
COMPARA COM O PROGRAMA DO USUÁRIO
ATUALIZA AS SAÍDASATUALIZA AS SAÍDAS
MES - 14/02/2006 - Página 5-
Unidade de processamento: Também conhecida por CPU, é composta por microcontroladores ou microprocessadores (Intel 80xx, motorola 68xx, PIC 16xx). Endereçamento de memória de até 1Mega Byte, velocidades de clock de 4 a 30 MHz, manipulação de dados decimais, octais e hexadecimais.
Bateria: Utilizada para manter o circuito do relógio em tempo real. Normalmente são utilizadas baterias recarregáveis do tipo Ni - Ca.
Memória do programa supervisor: O programa supervisor é responsável pelo gerenciamento de todas as atividades do CLP. Não pode ser modificado pelo usuário e fica normalmente em memórias do tipo PROM, EPROM, EEPROM.
Memória do usuário: Espaço reservado ao programa do usuário. Constituída por memórias do tipo RAM, EEPROM ou FLASH-EPROM. Também pode-se utilizar cartuchos de memória, para proporcionar agilidade e flexibilidade.
Memória de dados: Armazena valores do programa do usuário, tais como valores de temporizadores, contadores, códigos de erros, senhas, etc. Nesta região se encontra também a memória imagem das entradas – a saídas. Esta funciona como uma tabela virtual onde a CPU busca informações para o processo decisório.
Os circuitos auxiliares atuam em caso de falha do CLP, são: POWER ON RESET: desliga todas as saídas assim que o equipamento é ligado, isso evita que possíveis danos venham a acontecer. POWER DOWN: monitora a tensão de alimentação salvando o conteúdo das memórias antes que alguma queda de energia possa acontecer. WATCH DOG TIMER: o cão de guarda deve ser acionado em intervalos periódicos, isso evita que o programa entre em “loop”.
1.5) Classificação dos CLPs
Os CLPs podem ser classificados segundo a sua capacidade:
Nano e micro CLPs: possuem até 16 entradas e a saídas. Normalmente são compostos por um único módulo com capacidade de memória máxima de 512 passos.
MES - 14/02/2006 - Página 7-
Capítulo 2 - Programação em Blocos Lógicos
Historicamente falando, a linguagem de programação em blocos lógicos surgiu posteriormente ao famoso Ladder. Apesar disso, os alunos tem apresentado facilidade maior para o aprendizado desta linguagem, sendo assim esta será a primeira a ser estudada no curso de CLPs. Para este tipo de linguagem a programação será realizada com um CLP comercial específico, que é o LOGO 24RL da Siemens, mostrado na figura 2.1. Embora se use um determinado equipamento, a linguagem é padronizada, assim o aluno fica habilitado a programar em diferentes outros modelos de controladores.
Figura 2.1 – CLP Logo da Siemens
Um dos primeiros passos, antes de se visualizar o funcionamento do sistema, consiste em fazer a ligação física externa dos componentes do controlador. Todo equipamento tem particularidades diferentes no caso da ligação elétrica. Estas diferentes particularidades devem ser consultadas no manual específico de cada fabricante. No caso do Logo, esta ligação é simples pois basta imaginar que a alimentação das entradas do CLP é feita com 24 Vcc, enquanto o sistema físico de potência utiliza 220 Vca. Assim devem existir dois circuitos separados distintos. Não é necessário o uso de relés pois a saída do Logo já contem estes elementos incorporados. Em alguns casos, para aumentar a segurança, protegendo o CLP, incorporam-se relés externos ao mesmo. A ligação genérica é demonstrada na figura 2.2 e vale para todas as práticas no laboratório, com exceção de algumas práticas, onde serão utilizadas menos entradas e/ou saídas. Maiores detalhes podem ser encontrados no manual do fabricante.
MES - 14/02/2006 - Página 8-
Figura 2.2 – Esquema Elétrico para ligação do Logo
Após a ligação física externa, pode-se passar a programação propriamente dita. É importante ter em mente que a linguagem de blocos lógicos possui diversas funções pré- estabelecidas, cujos símbolos são padronizados. Cada símbolo significa o efeito do bloco no contexto do programa, como será visto posteriormente. Assim no CLP utilizado, para facilitar a programação, os blocos de funções foram divididos em 4 principais listas, descritas a seguir:
A) ↓ Co: Lista “Co” (Connector)
- Entradas: I1, I2, I3,…
- Saídas: Q1, Q2, Q3,...
- Níveis: lo Æ baixo; hi Æ alto
- Não conectado, ou inutilizado: “X”
MES - 14/02/2006 - Página 10-
Capítulo 3 - Funções Gerais (Lista GF)
As funções gerais consistem em funções lógicas, normalmente estudadas nos cursos de Técnicas Digitais. Abaixo encontra-se uma descrição mais detalhada de cada uma delas. Deve-se lembrar que em programação lógica, a representação que melhor se aplica ao entendimento das funções é a Tabela Verdade. A Tabela Verdade consiste na representação de todas as combinações lógicas possíveis entre as entradas e saídas. Para 2 entradas a tabela tem 4 linhas. Para 3 entradas a tabela tem 8 linhas, seguindo sempre uma relação de 2 n, onde “n” é o número de entradas.
A) Função AND
Nesta função a saída é ativada somente se todas as entradas estiverem ativadas. Ao lado se encontra a simbologia no logo.
Tabela Verdade para 3 entradas
I1 I2 I3 Q 0 0 0 0 0 0 1 0 0 1 0 0 0 1 1 0 1 0 0 0 1 0 1 0 1 1 0 0 1 1 1 1
Tabela verdade para 2 entradas
I1 I2 Q 0 0 0 0 1 0 1 0 0 1 1 1
MES - 14/02/2006 - Página 11-
B) Função OR
Nesta função a saída é ativada se qualquer uma das entradas estiver ativada.
C) Função NAND
Nesta função a saída é ativada sempre que uma das entradas for zero, ou seja, a saída é nula quando todas as entradas estiverem ativadas. Observe que diferença para a função AND consiste em um ponto ou um quadrado no lado as saída do bloco.
Tabela Verdade para 3 entradas: I1 I2 I3 Q 0 0 0 0 0 0 1 1 0 1 0 1 0 1 1 1 1 0 0 1 1 0 1 1 1 1 0 1 1 1 1 1
Tabela Verdade para 2 entradas I1 I2 Q 0 0 0 0 1 1 1 0 1 1 1 1
Tabela verdade para 3 entradas I1 I2 I3 Q 0 0 0 1 0 0 1 1 0 1 0 1 0 1 1 1 1 0 0 1 1 0 1 1 1 1 0 1 1 1 1 0
Tabela verdade para 2 entradas I1 I2 Q 0 0 1 0 1 1 1 0 1 1 1 0
MES - 14/02/2006 - Página 13-
B)
C)
E3.3) Descreva o que acontece no circuito abaixo, com a saída, quando se aciona os botões I1 e I2.
MES - 14/02/2006 - Página 14-
Capítulo 4 – Funções Especiais do LOGO
Neste capítulo apresenta-se as principais funções especiais incorporadas no CLP Logo, que são aquelas constituídas por temporizadores internos. Nas funções especiais deve-se observar a seguinte nomeclatura:
¾ Trg = Trigger Æ Disparo em Português. Refere-se a entrada que deve ser acionada para que o bloco tenha atuação. ¾ Par = Parameter Æ Parâmetro em Portugês. Refere-se a entrada onde é ajustado o parâmetro do bloco, como tempo, por exemplo.
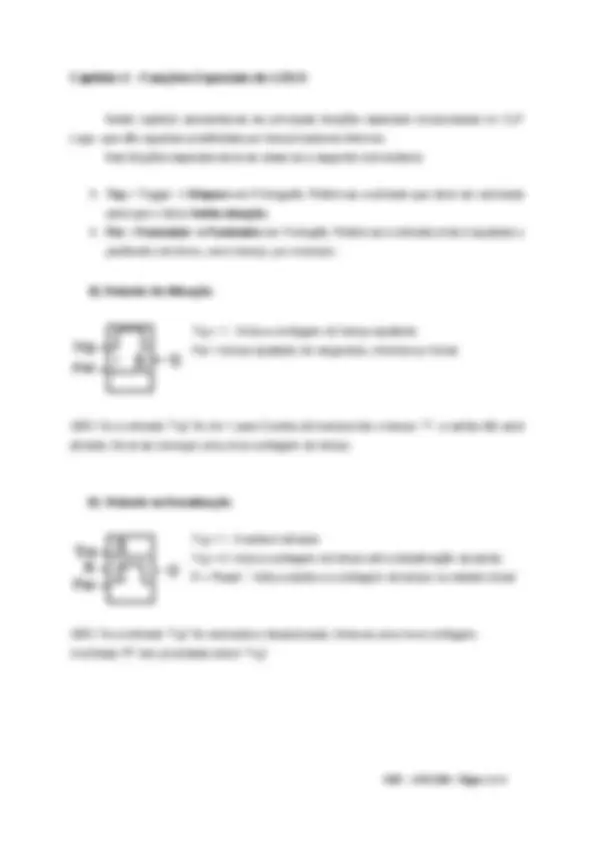
A) Retardo de Ativação
Trg = 1 : Inicia a contagem do tempo ajustado Par = tempo ajustado em segundos, minutos ou horas
OBS: Se a entrada “Trg” for de 1 para 0 antes de transcorrido o tempo “T”, a saída não será ativada. Deve-se começar uma nova contagem de tempo.
B) Retardo na Desativação
Trg = 1: A saída é ativada Trg = 0: Incia a contagem de tempo até a desativação da saída R = Reset : Volta a saída e a contagem de tempo no estado inicial
OBS: Se a entrada “Trg” for acionada e desacionada, inicia-se uma nova contagem. A entrada “R” tem prioridade sobre “Trg”.
MES - 14/02/2006 - Página 16-
G) Contador Crescente / Decrescente
R = 1 : Leva o valor da contagem a zero. Desativa a saída. Cnt 0 Æ 1 : Conta as transições de 0 para 1. As transições de 1 para 0 não são contadas. Dir = 1 : Contagem crescente Dir = 0 : Contagem decrescente Par: Valor de 0 a 999999 que corresponde ao valor desejado para a contagem. A saída “Q” é ativada após a contagem programada em “Par”.
MES - 14/02/2006 - Página 17-
4.1) Laboratório – Uso das Funções Especiais
- Programe a função com retardo na ativação, mostrada na figura abaixo.
Responda: O que acontece se ficar com o botão apertado mais de 5 segundos? O que acontece se ficar com o botão apertado menos de 5s?
- Programe a função com retardo na desativação, mostrada na figura abaixo.
Responda: O que acontece quando aperto o botão I1 e depois solto? O que acontece se apertar o botão I2 antes de 5s?
- Programe a função relé de impulsos.
Responda: O que acontece quando aperto I1? E se apertar I1 novamente? O que acontece quando aperto I2?
- Programe a função relé de impusos simétricos.
Responda: O que acontece quando pressiono I e mantenho pressionado? O que acontece quando libero o botão I1.
- Programe a função Relé de Contato Passageiro.
Responda: O que acontece se ficar com o a botoeira I1 pressionada por mais de 5s? O que acontece se ficar com a botoeira pressionada por menos de 5s?
- Programe a Função Relé com Auto-Retenção, mostrada na figura abaixo.
Responda: O que acontece quanto pressiono I e depois solto? O que acontece quando pressiono a botoeira I2 e depois solto?
- Programe o contador crescente/decrescente, observando seu funcionamento.
MES - 14/02/2006 - Página 19-
5. 2) Acionamento alternado de Motores
Problema : Dois motores em uma fábrica devem ser acionados alternadamente em um intervalo de tempo de 30 min. Como resolver este problema utilizando a programação em Blocos Lógicos.
I1 – Liga; I2 – Desliga; Q1 – Motor 01; Q2 – Motor 02
5.3) Segurança de Prensa com contato passageiro
Problema : Duas chaves devem comandar uma prensa simultaneamente de modo que acionada a primeira chave, não podem transcorrer mais do que 0,5s até que a segunda chave seja acionada. Se o operador retirar a mão das chaves, a prensa deverá parar, por razões de segurança. Fazer um programa para resolver este problema.
MES - 14/02/2006 - Página 20-
5.4) Segurança na Prensa com acionamento seqüencial
Problema : Duas chaves devem comandar um motor de prensa, de modo que: a) Acionadas na seqüência I1, I2 o motor não liga. b) Acionadas na seqüência I2, I1 o motor liga. c) Ao soltar uma das chaves, o motor desliga. Fazer um programa para resolver este problema.
5.5) Partida Estrela / Triângulo
Problema : Uma prática em ambientes industrias é a partida de motores em Estrela (Y) / Triângulo (∆), para reduzir a corrente inicial, evitando fiação com grandes bitolas e multas por baixo fator de potência. Para isso utilizam-se de 3 contatores, que devem respeitar as seguintes regras:
A) O contator “K1” deve permanecer ligado; B) O contator “K3” deve ficar ligado 6s e o restante do tempo desligado; C) O contator “K2” deve ligar logo após o contator “K3” ter se desligado; D) Os contatores “K2” e “K3” nunca devem ficar ligados ao mesmo tempo.
Fazer um programa em Blocos Lógicos para comandar este motor.