Baixe Comunicação Serial e outras Notas de estudo em PDF para Engenharia Elétrica, somente na Docsity!
Controlador Digital Universal DMY-2030 Light
EM0028-02 Comunicação
1.0 - Introdução
A comunicação serial com um instrumento permite diversas vantagens como o monitoramento de variáveis e a mudança de parâmetros a certa distância, além de permitir a ligação dos instrumentos em rede, com grande economia de fios e instalações elétricas. Isto tem possibilitado a modernização das indústrias. Atualmente vem se tornando cada vez mais comum a implantação de sistemas supervisórios capazes de monitorar as diversas variáveis de um processo ou mesmo que permitam tomar decisões a partir de uma sala de controle. Os três padrões mais conhecidos de comunicação serial são: RS-232, RS-422 e RS-
O padrão RS-232 é o mais antigo e mais conhecido. Ele permite transmissão de dados a uma distância de até 15 metros e a comunicação só é possível entre dois dispositivos. A ligação elétrica necessita de 3 fios. O padrão RS-422 melhorou o problema da distância. O limite para transmissão é de 1200 metros. A comunicação é feita entre um transmissor e um máximo de 10 receptores ligados em rede. A ligação elétrica requer 4 fios. O padrão RS-485 é um aprimoramento do padrão RS-422. Ele suporta um máximo de 32 transmissores e 32 receptores ligados em rede e necessita de apenas 2 fios para ligação elétrica. Existe um outro tipo de interface normalmente denominado RS-422/485 que combina a capacidade do padrão RS-485 de interligar diversos transmissores e receptores com o padrão RS- 422 cuja ligação elétrica requer 4 fios.
Controlador Digital Universal DMY-2030 Light
EM0028-02 Comunicação
2.0 - Instalação Elétrica Existem dois módulos opcionais para comunicação: o módulo opcional para interface RS- 232 e o módulo opcional para interface RS-422 ou RS-485. A relação destes módulos opcionais com seus respectivos códigos esta estabelecida na tabela abaixo: Tipo de Interface Código do módulo opcional Interface RS-232 MCOM232- Interface RS-422 ou RS-485 MCOM485- O módulo da comunicação deve ser encaixado no encaixe da comunicação (vide seção Colocação dos Módulos Opcionais no manual do instrumento) com a parte dos componentes voltada para o centro da placa da CPU.
2.1 - Ligação Elétrica para RS- DMY-2015 / TY-2095 Demais instrumentos
Fig. 1 - Ligação Elétrica para RS-
2.2 - Ligação Elétrica para RS- DMY-2015 / TY-2095 Demais instrumentos
Fig. 2 - Ligação Elétrica para RS-
Controlador Digital Universal DMY-2030 Light
EM0028-02 Comunicação
2.4 - Ligação Multiponto
A ligação multiponto só é permitida para interfaces RS-422 ou RS-485. O número máximo de instrumentos ligados à linha é 31 para ambos os casos. Abaixo encontra-se um exemplo deste tipo de ligação com interface RS-485.
Obs.: Não esqueça de verificar se foram colocados os devidos jumpers no último instrumento a fim de evitar reflexões na linha.
(*) o conversor RS-232 /485 é um produto encontrado com facilidade em revendas de material de informática e também pode ser adquirido através da Presys. Fig. 6 - Ligação Multiponto
2.5 - Especificações Técnicas
Interface:
Tamanho da palavra:
- 7 bits para ASCII:
- 8 bits para modo RTU.
Paridade:
- Sem paridade;
- Paridade par;
- Paridade ímpar.
Stop bits:
- 1 stop bit exceto para modo ASCII sem paridade;
- 2 stop bits para modo ASCII sem paridade. Protocolo:
Controlador Digital Universal DMY-2030 Light
EM0028-02 Comunicação
- Modbus é marca registrada da empresa MODICON e é um protocolo de comunicação industrial aberto e muito popular por suas características técnicas.
Modo de transmissão:
Comprimento da linha:
- Interface RS-232 - máximo 15 metros ;
- Interface RS-422 ou RS-485 - máximo 1200 metros.
Número de instrumentos por linha:
- 1 instrumento para RS-232;
- 31 instrumentos para RS-422 ou RS-485.
Modo de operação:
3.0 - Operação
3.1 - Configuração por software
No nível RS temos as seguintes opções: ENDER (ou ENDE), PROT, BAUD e PARID (ou PARD). Vide figura 7. ENDER - identifica o instrumento para efeito de comunicação. A faixa ajustável deste parâmetro é de 0 a 99, sendo que o valor 0 desabilita a comunicação. PROT - configura o modo de transmissão. Os dois modos existentes são: RTU e ASCII. BAUd - ajusta a taxa de transmissão dos caracteres (baud rate). Os valores disponíveis são: 300, 600, 1200, 2400, 4800 e 9600 bauds. PARID - configura o bit opcional de paridade. As opções são: sem paridade (Sen), com paridade par (PAr) e com paridade ímpar (InPAr).
Controlador Digital Universal DMY-2030 Light
EM0028-02 Comunicação
3.2 - Transmissão de um caracter
A informação a ser transmitida deve estar contida em uma palavra de 7 ou 8 bits. A esta palavra são agregados um start bit e um ou dois stop bits necessários para a transmissão assíncrona. O bit da paridade é opcional. O conjunto dos bits a serem transmitidos será denominado caracter. A figura 8 ilustra como deve ser transmitido um caracter. Note que a transmissão da palavra deve começar pelo bit menos significativo.
Fig. 8 - Transmissão Assíncrona
O número de stop bits nos instrumentos é fixo e igual a um stop bit, exceto para a configuração modo de transmissão ASCII sem bit de paridade que tem dois stop bits. Existem dois tipos de paridade: par e ímpar. O bit de paridade é determinado da seguinte forma: Ele deve ser tal que ao ser somado com todos os 1's da palavra se obtenha um valor par (no caso de paridade par) ou ímpar (no caso de paridade ímpar). Por exemplo: para a seguinte palavra de 7 bits 0110010, o bit de paridade é 1 se a paridade for par e 0 se a paridade for ímpar.
3.3 - Protocolo MODBUS
O protocolo de comunicação define uma estrutura de linguagem entre dispositivos conectados em rede. Ou seja, ele determina como se estabelece um início ou fim de contato, como uma mensagem é trocada etc. No caso específico do MODBUS o processo de troca de mensagem é do tipo Mestre-Escravo. A rede, composta por diversos dispositivos, deve comportar
Flu xo d e d a d o s Esta d o d a linh a Ló g ic a Ló g ic a
Bsig nific a tiv oit m e no s Bit m a issign ific a tivo Bit
Sta rt b it d o p róxim o c a ra cte r 1 o u 2 sto p b its Bit d e p a rid a d e (o p cio na l) Pa la v ra d e 7 o u 8 b its Sta rt b it
1 0
0 1 2 3 4 5 6 7 8
Controlador Digital Universal DMY-2030 Light
EM0028-02 Comunicação
apenas um dispositivo denominado Mestre (normalmente um microcomputador da linha IBM-PC), sendo os demais denominados Escravos (instrumentos). O Mestre sempre inicia a comunicação. Ele pode enviar uma mensagem a um determinado Escravo, identificado por um número (endereço), ou a todos os Escravos da rede de uma só vez (mensagem do tipo Broadcast). Cabe ao Escravo responder sempre ao Mestre desde que a mensagem não seja do tipo Broadcast.
3.4 - Modos de Transmissão A mensagem é composta por um conjunto de palavras. A palavra é a menor unidade de informação. A transmissão de um caracter obedece a determinadas características configuradas pelo usuário como baud rate, bit de paridade, número de stop bits e modo de transmissão. O modo de transmissão define a estrutura de uma palavra a ser transmitida. De acordo com o protocolo MODBUS são disponíveis dois modos de transmissão: RTU e ASCII. No modo RTU (Remote Terminal Unit), a palavra é composta de 8 bits. No modo ASCII (American Standard Code for Information Interchange) a palavra é composta de 7 bits, sendo que cada palavra do modo RTU passa a ser representada por duas palavras. A primeira corresponde ao código ASCII do valor hexadecimal obtido com os quatro bits mais significativos da palavra em RTU e a segunda corresponde ao código do valor hexadecimal obtido com os quatro bits menos significativos. Os códigos ASCII utilizados são: '0'-'9' e 'A'-'F'. Por exemplo, o valor 177, expresso em binário como 10110001 e em hexadecimal como B1, é transmitido da seguinte forma: -no modo RTU os oito bits a serem transmitidos são 10110001; -no modo ASCII, o valor 177 é subdividido em duas palavras. A primeira corresponde ao código em hexadecimal dos quatro bits mais significativos, ou seja, 'B'. Os primeiros sete bits a serem transmitidos são 1000010 (código 66 da tabela ASCII). A segunda corresponde ao código em hexadecimal dos quatro bits menos significativos, ou seja, '1'. Os outros sete bits a serem transmitidos são 0110010 (código 49 da tabela ASCII).
3.5 - Detecção de Erro O sistema MODBUS tem métodos específicos para tratar um erro. Um erro de transmissão de uma palavra é detectado pelo bit de paridade ou pelo erro no formato da transmissão de uma palavra (start bit e stop bits). Infelizmente, só estes dois tipos de erro não garantem a existência ou não de erros na transmissão de uma mensagem. Para aumentar ainda mais a confiança na transmissão, existe a Verificação de Erro que será explicada posteriormente.
Controlador Digital Universal DMY-2030 Light
EM0028-02 Comunicação
Formato do modo RTU: Neste formato, a mensagem deve ser enviada de modo contínuo. O receptor deve interpretar o fim de mensagem após passar um período igual ou superior ao tempo necessário para transmitir 3 e ½caracteres sem que nenhum outro caracter tenha chegado.
T1 T2 T3 Endereço do Escravo
Código da Função
Dados CRC T1 T2 T
1 caracter 1 caracter N x 1 carac. 2 caracteres 1 caracter (carac.) = 8 bits, 1 start bit, 1 ou 2 stop bits e 1 bit de paridade opcional
Formato do modo ASCII: Este formato permite a comunicação com Mestres que tenham um processamento mais lento. O início de mensagem é reconhecido após a chegada do código ASCII 58 (':') e o final de mensagem é reconhecido após a chegada do código ASCII 13 (carriage return - CR) e do código 10 (line feed - LF). O final de mensagem também deve ser interpretado se houver uma demora de mais de 1 segundo entre a transmissão de caracteres.
Início da Mensagem
Endereço do Escravo
Código da Função
Dados LRC Final de Mensagem
Pronto para receber Mensagem ':' 2 carac. 2 carac. N x 2 carac. 2 carac. CR LF 1 caracter (carac.) = 7 bits, 1 start bit, 1 ou 2 stop bits e 1 bit de paridade opcional
3.7 - Descrição das Funções
As funções disponíveis são: 1, 3, 4, 5, 6, 8, 15 e 16. Os exemplos dados a seguir referem- se ao modo RTU. Para converter para o modo ASCII, basta obedecer a explicação da seção Modos de Transmissão. A mensagem do tipo Broadcast só é permitida para as funções 5, 6, 15 e
Com estas funções é possível ler ou modificar (escrever) o valor de certas variáveis do instrumento. As funções 1, 5 e 15 referem-se a variáveis do tipo coil. Este tipo de variável assume somente dois valores (0 ou 1) e é normalmente usada para verificação do estado de alarme, habilitar ou desabilitar algo etc. As funções 3, 4, 6 e 16 referem-se a variáveis do tipo registro. Este tipo de variável pode assumir valores inteiros de até dois bytes (de 0 a 65535 para valores não sinalizados
Controlador Digital Universal DMY-2030 Light
EM0028-02 Comunicação
ou de -32768 a 32767 para valores sinalizados) e é normalmente usada para modificar o set-point de alarme, leitura da variável de processo etc. Função 1 - Read Output Status
Pergunta: Esta função é usada para se obter o estado de um coil (bit), ou de vários coils consecutivos de um Escravo. O campo de Dados deve ser preenchido com o endereço inicial do coil, seguido pela quantidade de coils que se deseja saber o estado. A quantidade máxima de coils permitida pelo software dos instrumentos é 30. A mensagem abaixo pede ao escravo de endereço 17 que retorne o estado dos coils 19 ao 39 (21 coils ao todo).
Endereço Função End. Inicial (MSB)
End. Inicial (LSB)
Quantid. de coils (MSB)
Quantid. de coils (LSB)
CRC
(MSB)
CRC
(LSB)
Obs.: -Os valores apresentados na figura acima e nas seguintes estão expressos na base hexadecimal. -MSB é abreviatura para byte mais significativo e LSB para o byte menos significativo.
Resposta: O campo de Dados deve conter o número de caracteres a serem enviados (sempre relativo ao modo RTU), seguido dos caracteres com a resposta. A resposta deve ser enviada de forma compactada. Cada coil deve corresponder a um bit. Cada conjunto de 8 coils deve formar um caracter. O bit menos significativo deve corresponder ao endereço mais baixo. Quando o número de coils não for múltiplo de 8, os bits não preenchidos devem conter 0. A mensagem a seguir responde ao Mestre que os coils 20, 23, 24, 26, 28-30, 35, 36, 38 e 39 estão ativos. Os demais coils estão inativos
Endereço Função N.° de caracteres
Estado dos coils 19-
Estado dos coils 27-
Estado dos coils 35-
CRC
(MSB)
CRC
(LSB)
11 01 03 B2 0E 1B DA 92
Controlador Digital Universal DMY-2030 Light
EM0028-02 Comunicação
A mensagem a seguir pede ao Escravo de endereço 17 que mude o valor do coil 84 para ativo. Endereço Função End. do Coil (MSB)
End. do Coil (LSB)
Valor do Coil (MSB)
Valor do Coil (LSB)
CRC
(MSB)
CRC
(LSB)
11 05 00 54 FF 00 CF 7A
Resposta: A mensagem de resposta deve ser idêntica àquela enviada pelo Mestre. Ela deve ser transmitida após a modificação do estado do coil. Para o exemplo acima, o Escravo deve responder da seguinte forma:
Endereço Função End. do Coil (MSB)
End. do Coil (LSB)
Valor do Coil (MSB)
Valor do Coil (LSB)
CRC
(MSB)
CRC
(LSB)
11 05 00 54 FF 00 CF 7A
Função 6 - Preset Single Register
Pergunta: Esta função é usada para se modificar o valor de um único registro do Escravo. O campo de Dados deve ser preenchido com o endereço do registro, seguido pelo seu novo valor. A mensagem a seguir pede ao Escravo de endereço 17 que mude o valor do registro 84 para 926:
Endereço Função End. do Registro (MSB)
End. do Registro (LSB)
Valor do Registro (MSB)
Valor do Registro (LSB)
CRC
(MSB)
CRC
(LSB)
11 06 00 54 03 9E 4B D
Resposta: A mensagem de resposta deve ser idêntica àquela enviada pelo Mestre. Ela deve ser transmitida após a modificação do registro. Para o exemplo acima, o Escravo deve responder da seguinte forma:
Controlador Digital Universal DMY-2030 Light
EM0028-02 Comunicação
Endereço Função End. do Registro (MSB)
End. do Registro (LSB)
Valor do Registro (MSB)
Valor do Registro (LSB)
CRC
(MSB)
CRC
(LSB)
11 06 00 54 03 9E 4B D
Função 8 - Loopback Test
Pergunta: Esta função tem a finalidade de testar o sistema de comunicação. O campo de Dados deve ser preenchido com o código do diagnóstico (2 bytes) seguido pela ação a ser realizada (2 bytes). O único código de diagnóstico implementado para esta função é o zero. Este código pede a devolução do dado enviado (ação a ser realizada). Neste caso, a ação a ser realizada pode ser qualquer valor. A mensagem abaixo pede ao Escravo que retransmita a mesma mensagem:
Endereço Função Código do Diagnóst. (MSB)
Código do Diagnóst. (LSB)
Ação a se realizar (MSB)
Ação a se realizar (LSB)
CRC
(MSB)
CRC
(LSB)
11 08 00 00 A5 37 D8 1D
Resposta: Para este código de diagnóstico (0), a mensagem a ser enviada deve ser idêntica àquela transmitida pelo Mestre. Para o exemplo acima, o Escravo deve retornar a seguinte mensagem:
Endereço Função Código do Diagnóst. (MSB)
Código do Diagnóst. (LSB)
Ação a se realizar (MSB)
Ação a se realizar (LSB)
CRC
(MSB)
CRC
(LSB)
11 08 00 00 A5 37 D8 1D
Função 15 - Force Multiple Coils
Pergunta:
Controlador Digital Universal DMY-2030 Light
EM0028-02 Comunicação
End. Função End. Inicial MSB
End. Inicial LSB
Quant. Reg. (MSB)
Quant. Reg. (LSB)
N.°
de carac.
Reg 96 MSB
Reg. 96 LSB
Reg 97 MSB
Reg. 97 LSB
CRC
MSB
CRC
LSB
11 10 00 60 00 02 04 00 0A 01 02 01 14
Resposta: O campo de Dados deve ser preenchido com o endereço inicial do conjunto de registros e a quantidade de registros modificados. Para o exemplo acima, o Escravo deve retornar a seguinte mensagem:
Endereço Função End. Inicial (MSB)
Endereço Inicial (LSB)
Quantid. de Reg. (MSB)
Quantid. de Reg. (LSB)
CRC
(MSB)
CRC
(LSB)
Mensagem de Erro Quando por alguma razão o Escravo não pode executar uma determinada ação pedida pelo Mestre, o Escravo deve retornar uma mensagem de erro da seguinte forma: -o campo de Código da Função deve ser preenchido como o Código da Função enviado pelo Mestre somado de 128 unidades. -o campo de Dados deve ser preenchido com um byte contendo o número do Código de exceção. Os Códigos implementados foram: -01: quando a função pedida pelo Mestre não é possível de ser realizada. -02:quando o endereço do coil ou registro está fora da faixa permitida. -03: quando o valor do campo de Dados está fora da faixa permitida. Exemplo: Suponha que o Mestre envie ao Escravo uma mensagem para ler um registro (função 1) cujo endereço não exista. O Escravo deve retornar a seguinte mensagem:
Endereço Função Código de Exceção
CRC
(MSB)
CRC
(LSB)
11 81 02 C0 54
3.8 - Relação dos Registros e Coils para DMY-2030, TY-2090, DMY-2030-F, TY-2090-F e DMY-
Controlador Digital Universal DMY-2030 Light
EM0028-02 Comunicação
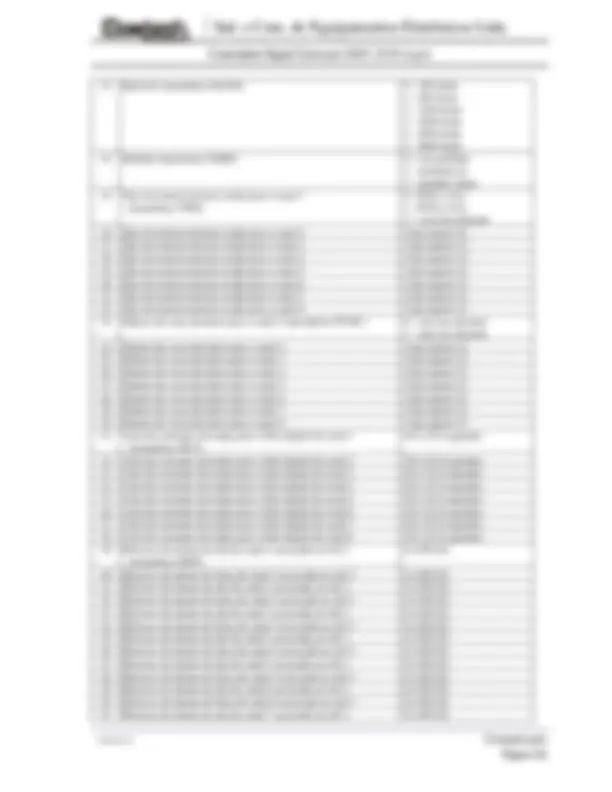
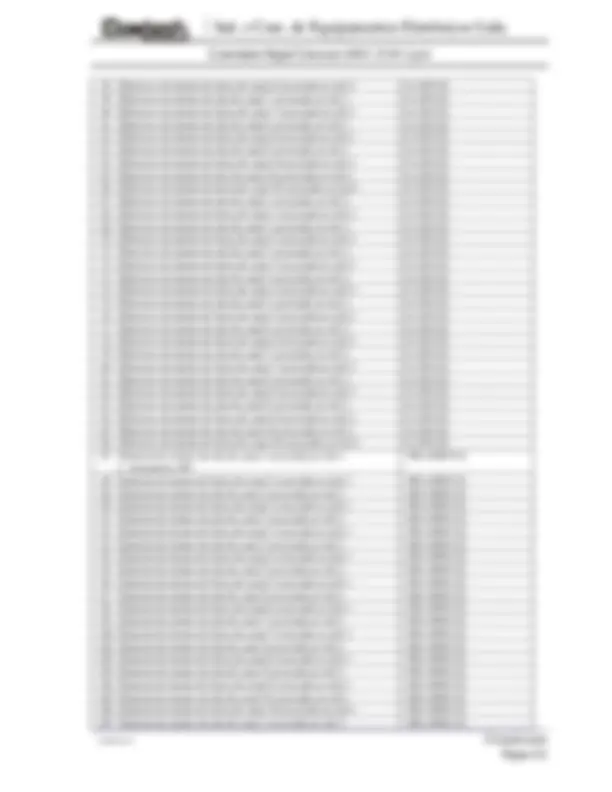
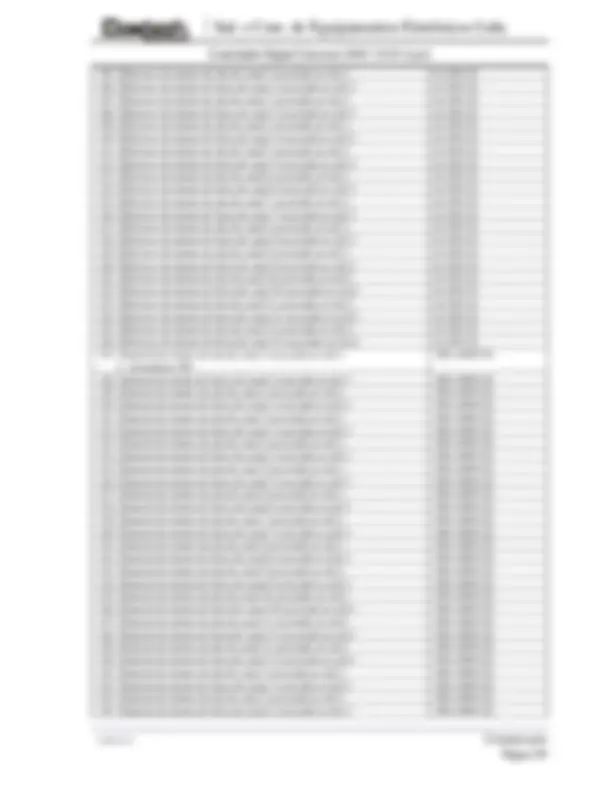
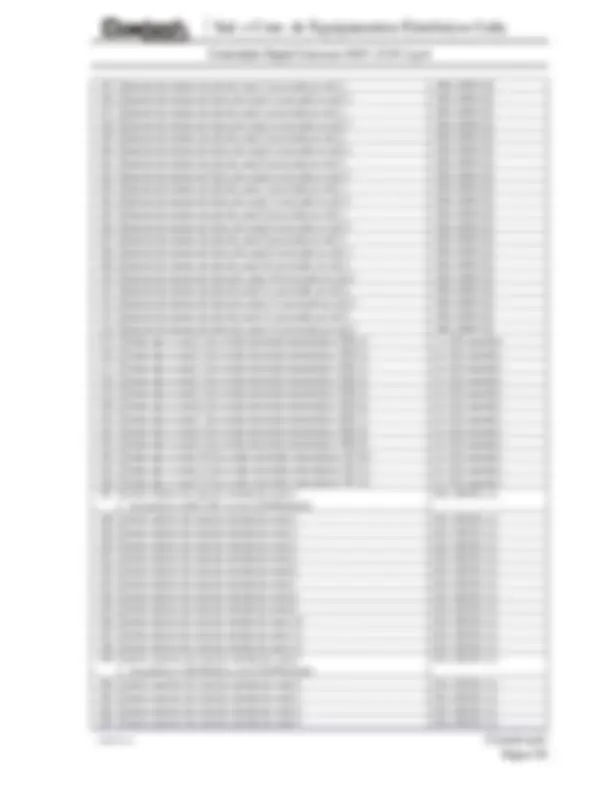
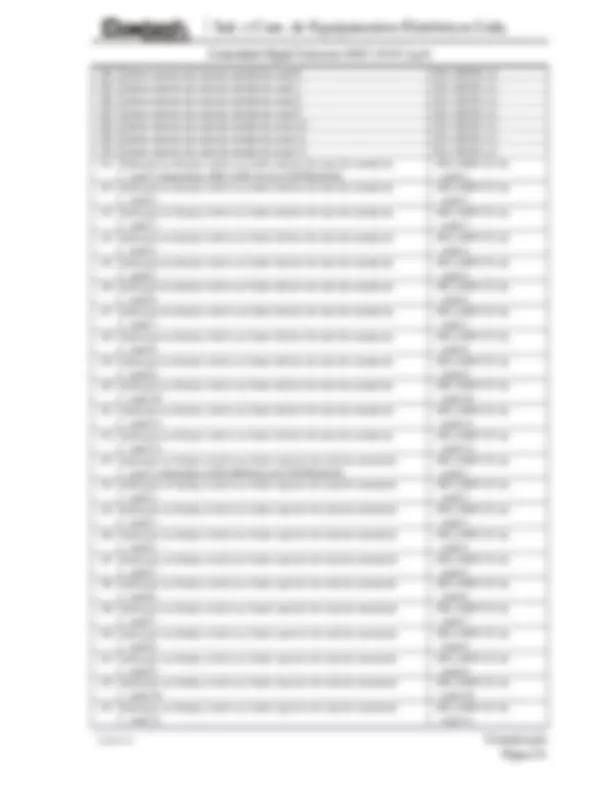
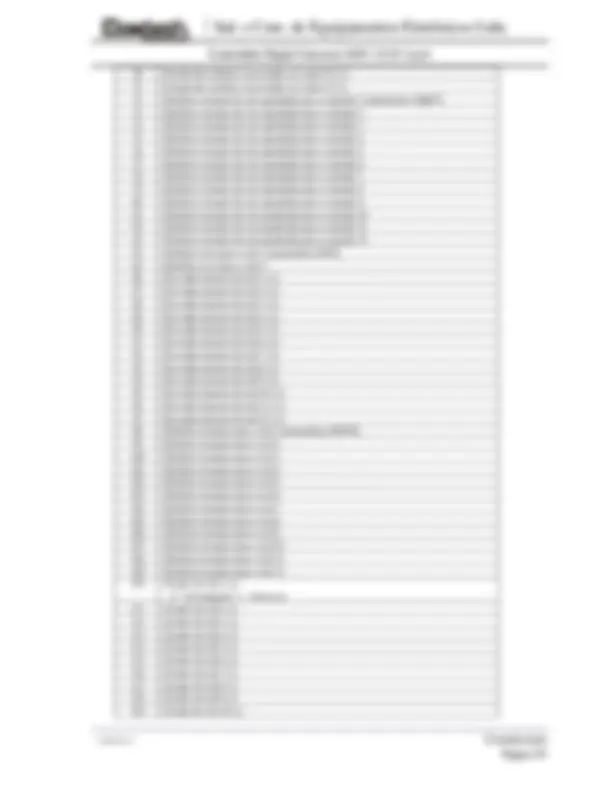
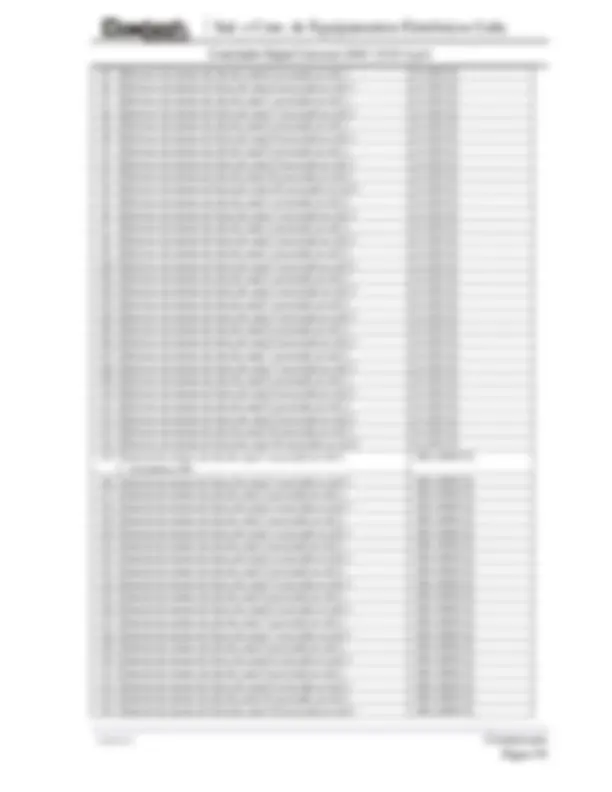
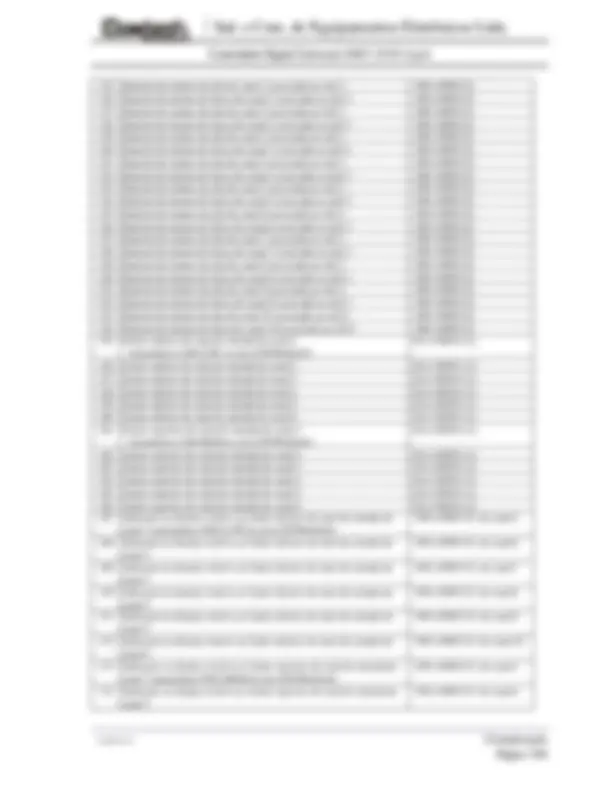
3.8.1 - Relação dos Registros
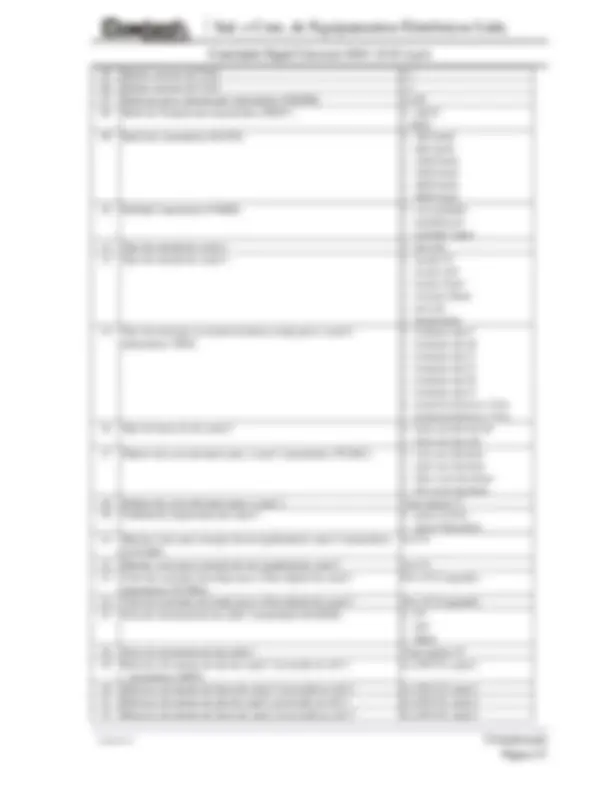
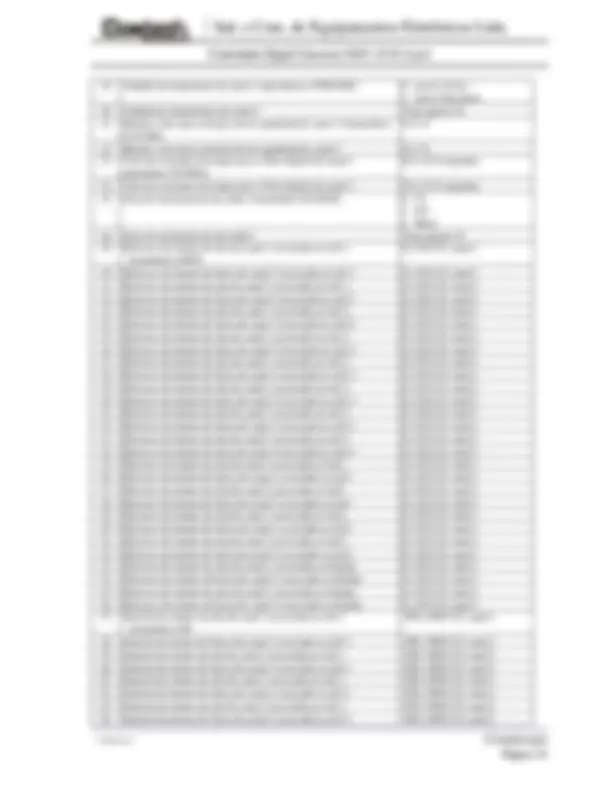
A seguir encontra-se em forma de tabela uma relação com todos os registros encontrados nos instrumentos DMY-2030, TY-2090, DMY-2030-F, TY-2090-F e DMY-2032, os respectivos endereços e as faixas de valores permitidos. Alguns registros, entretanto, não são disponíveis para um ou outro instrumento.
End Registros Faixa de valores 00 Variável de Processo do canal 1 Somente leitura (U.E. canal 1) 01 Variável de Processo do canal 2 Somente leitura (U.E. canal 2) 02 Primeiro caracter do TAG ( i ) 03 Segundo caracter do TAG ( i ) 04 Terceiro caracter do TAG ( i ) 05 Quarto caracter do TAG ( i ) 06 Quinto caracter do TAG ( i ) 07 Endereço para comunicação (mnemônico ENDER) 0 a 99 08 Modo de Transmissão (mnemônico PROT.) 0 - ASCII 1- RTU 09 Baud rate (mnemônico BAUD) 0 - 300 bauds 1 - 600 bauds 2 - 1200 bauds 3 - 2400 bauds 4 - 4800 bauds 5 - 9600 bauds 10 Paridade (mnemônico PARID) 0 - sem paridade 1 - paridade par 2 - paridade ímpar 11 Tipo de entrada do canal 1 0 - tensão 5V 1 - tensão 10V 2 - tensão 55mV 3 - corrente 20mA 4 - temperatura 12 Tipo de entrada do canal 2 Veja registro 11 13 Tipo de termopar ou termoresistência usada para o canal 1 (mnemônico TIPO)
0 - termopar tipo J 1 - termopar tipo K 2 - termopar tipo T 3 - termopar tipo E 4 - termopar tipo R 5 - termopar tipo S 6 - termoresistência a 2 fios 7 - termoresistência a 3 fios 14 Tipo de termopar ou termoresistência usada para o canal 2 Veja registro 13 15 Tipo de burn-out do canal 1 (mnemônico B. OUT) 0 - burn-out downscale 1 - burn-out upscale 16 Tipo de burn-out do canal 2 Veja registro 15 17 Número de casas decimais para o canal 1 (mnemônico PT.DEC) 0 - sem casa decimal 1 - uma casa decimal 2 - duas casas decimais 3 - três casas decimais 4 - quatro casas decimais ( iii )
Controlador Digital Universal DMY-2030 Light
EM0028-02 Comunicação
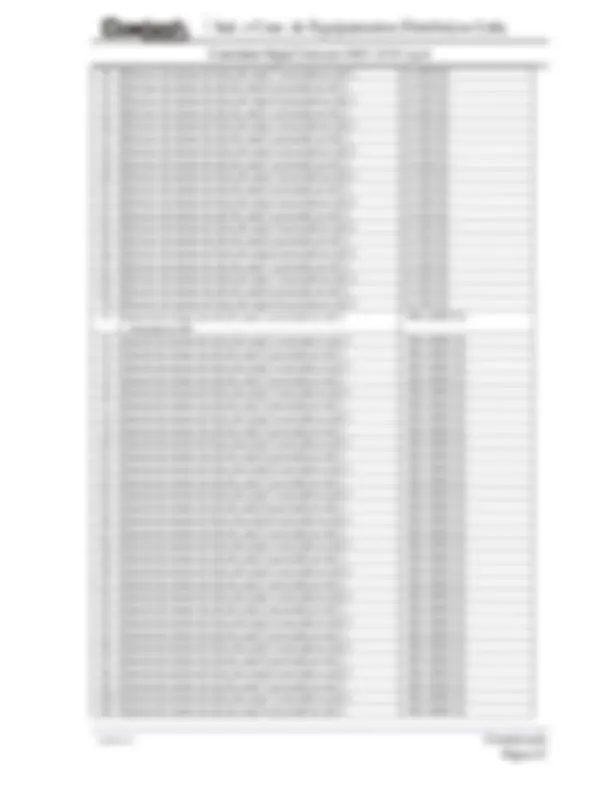
60 Setpoint do alarme de baixa do canal 2 associado ao relê 1 -1009 a 20019 U.E. canal 2 ( iv ) 61 Setpoint do alarme de alta do canal 1 associado ao relê 2 -1009 a 20019 U.E. canal 1 ( iv ) 62 Setpoint do alarme de baixa do canal 1 associado ao relê 2 -1009 a 20019 U.E. canal 1 ( iv ) 63 Setpoint do alarme de alta do canal 2 associado ao relê 2 -1009 a 20019 U.E. canal 2 ( iv ) 64 Setpoint do alarme de baixa do canal 2 associado ao relê 2 -1009 a 20019 U.E. canal 2 ( iv ) 65 Setpoint do alarme de alta do canal 1 associado ao relê 3 -1009 a 20019 U.E. canal 1 ( iv ) 66 Setpoint do alarme de baixa do canal 1 associado ao relê 3 -1009 a 20019 U.E. canal 1 ( iv ) 67 Setpoint do alarme de alta do canal 2 associado ao relê 3 -1009 a 20019 U.E. canal 2 ( iv ) 68 Setpoint do alarme de baixa do canal 2 associado ao relê 3 -1009 a 20019 U.E. canal 2 ( iv ) 69 Setpoint do alarme de alta do canal 1 associado ao relê 4 -1009 a 20019 U.E. canal 1 ( iv ) 70 Setpoint do alarme de baixa do canal 1 associado ao relê 4 -1009 a 20019 U.E. canal 1 ( iv ) 71 Setpoint do alarme de alta do canal 2 associado ao relê 4 -1009 a 20019 U.E. canal 2 ( iv ) 72 Setpoint do alarme de baixa do canal 2 associado ao relê 4 -1009 a 20019 U.E. canal 2 ( iv ) 73 Setpoint do alarme de alta do canal 1 associado ao led 1 -1009 a 20019 U.E. canal 1 ( iv ) 74 Setpoint do alarme de baixa do canal 1 associado ao led 1 -1009 a 20019 U.E. canal 1 ( iv ) 75 Setpoint do alarme de alta do canal 2 associado ao led 1 -1009 a 20019 U.E. canal 2 ( iv ) 76 Setpoint do alarme de baixa do canal 2 associado ao led 1 -1009 a 20019 U.E. canal 2 ( iv ) 77 Setpoint do alarme de alta do canal 1 associado ao led 2 -1009 a 20019 U.E. canal 1 ( iv ) 78 Setpoint do alarme de baixa do canal 1 associado ao led 2 -1009 a 20019 U.E. canal 1 ( iv ) 79 Setpoint do alarme de alta do canal 2 associado ao led 2 -1009 a 20019 U.E. canal 2 ( iv ) 80 Setpoint do alarme de baixa do canal 2 associado ao led 2 -1009 a 20019 U.E. canal 2 ( iv ) 81 Setpoint do alarme de alta do canal 1 associado ao display -1009 a 20019 U.E. canal 1 ( iv ) 82 Setpoint do alarme de baixa do canal 1 associado ao display -1009 a 20019 U.E. canal 1 ( iv ) 83 Setpoint do alarme de alta do canal 2 associado ao display -1009 a 20019 U.E. canal 2 ( iv ) 84 Setpoint do alarme de baixa do canal 2 associado ao display -1009 a 20019 U.E. canal 2 ( iv ) 85 Tempo que o canal 1 fica sendo mostrado (mnemônico TEMPO 1) 1 a 3000 segundos 86 Tempo que o canal 2 fica sendo mostrado (mnemônico TEMPO 2) 1 a 3000 segundos 87 Limite inferior do sinal de entrada do canal 1 (mnemônico LIM LOW do nível ENTRADAS)
0.0 a 100.0 % ( v ) 88 Limite inferior do sinal de entrada do canal 2 0.0 a 100.0 % ( v ) 89 Limite superior do sinal de entrada do canal 1 (mnemônico LIM HIGH do nível ENTRADAS)
0.0 a 100.0 % ( v ) 90 Limite superior do sinal de entrada do canal 2 0.0 a 100.0 % ( iv ) 91 Indicação no display relativa ao limite inferior do sinal de entrada do canal 1 (mnemônico ENG LOW do nível ENTRADA)
-1009 a 20019 U.E. canal 1 ( iv ) 92 Indicação no display relativa ao limite inferior do sinal de entrada do canal 2
-1009 a 20019 U.E. canal 2 ( iv ) 93 Indicação no display relativa ao limite superior do sinal de entrada do canal 1 (mnemônico ENG HIGH do nível ENTRADA)
-1009 a 20019 U.E. canal 1 ( iv ) 94 Indicação no display relativa ao limite superior do sinal de entrada do canal 2
-1009 a 20019 U.E. canal 2 ( iv ) 95 Offset do canal 1 (mnemônico OFSET) -9999 a 30000 U.E. canal 1 ( vi ) 96 Offset do canal 2 -9999 a 30000 U.E. canal 2 ( vi ) 97 Indicação no display relativa ao limite inferior do sinal de retransmissão da saída 1 (mnemônico ENG LOW do nível SAÍDA)
-1009 a 20019 U.E. canal 1 ou 2 (vi i ) ( iv ) 98 Indicação no display relativa ao limite inferior do sinal de retransmissão da saída 2
-1009 a 20019 U.E. canal 2 ou 1 (vi i ) ( iv ) 99 Indicação no display relativa ao limite superior do sinal de retransmissão da saída 1 (mnemônico ENG HIGH do nível SAÍDA)
Veja registro 97 100 Indicação no display relativa ao limite superior do sinal de retransmissão da saída 2
Veja registro 98
Controlador Digital Universal DMY-2030 Light
EM0028-02 Comunicação
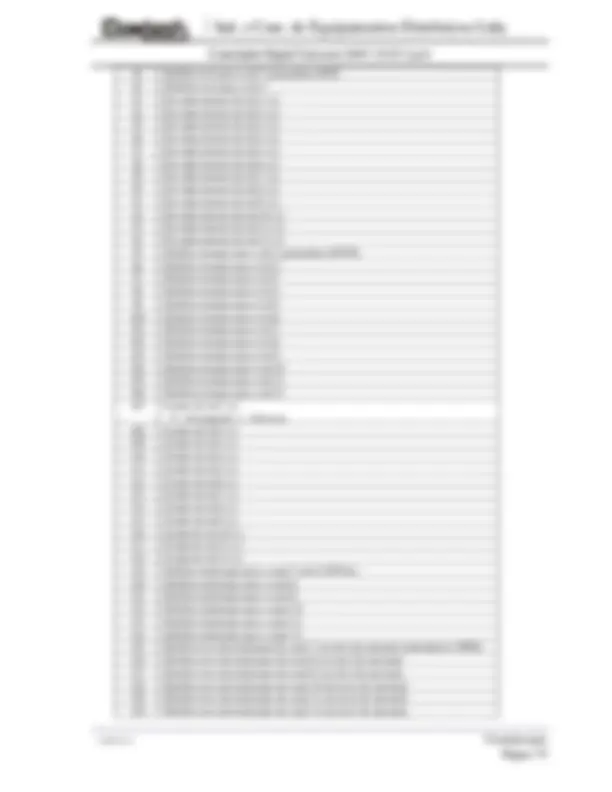
101 Limite superior do sinal de retransmissão da saída 1 (mnemônico LIM HIGH do nível SAÍDA)
0.0 a 100.0 % ( viii ) 102 Limite inferior do sinal de retransmissão da saída 1 (mnemônico LIM LOW do nível SAÍDA)
0.0 a 100.0 % ( viii ) 103 Limite superior do sinal de retransmissão da saída 2 (mnemônico LIM HIGH do nível SAÍDA)
0.0 a 100.0 % ( viii ) 104 Limite inferior do sinal de retransmissão da saída 2 (mnemônico LIM LOW do nível SAÍDA)
0.0 a 100.0 % ( viii ) 105 Retardo referente ao relê 1 (mnemônico RETARDO) 0.0 a 3000.0 segundos ( ix ) 106 Retardo referente ao relê 2 0.0 a 3000.0 segundos ( ix ) 107 Retardo referente ao relê 3 0.0 a 3000.0 segundos ( ix ) 108 Retardo referente ao relê 4 0.0 a 3000.0 segundos ( ix ) 109 Senha (mnemônico SENHA) -9999 a 30000 ( vi ) 110 Versão (mnemônico SOFT) Somente leitura Obs.: -Os registros não disponíveis para o TY-2090 são: 45 a 56 e 73 a 84; -Os registros não disponíveis para o DMY-2030-F são: 11 a 16 e 19 a 24; -Os registros não disponíveis para o TY-2090-F são: 11 a 16, 19 a 24, 45 a 56 e 73 a 84; -Registro não disponível para o DMY-2032: 6; -U.E. significa Unidade de Engenharia; -A faixa de valores de certos registros enumerados na tabela acima apresentam ponto decimal. Para efeito de formação da mensagem, deve-se ignorar a presença deste ponto decimal, visto que ele é fixo. Desta forma, para mudar o valor do filtro digital do canal 1 (registro 23) para 1,0 segundo, por exemplo, é necessário que o valor do registro mude para 10; ( i ) Os valores permitidos para os caracteres do TAG são os códigos ASCII dos seguintes caracteres: '-', '.', '_', ' ', '0' a '9' e 'a' a 'y' (exceto 'm', 'v', 'w' e 'x'); ( ii ) Registro disponível somente para TY-2090 e TY-2090-F; ( iii ) Para DMY-2032, utilizar faixa de 0 a 3. ( iv ) Para DMY-2030-F e TY-2090-F, utilizar faixa de -9999 a 30000 U.E; Para DMY-2032, utilizar faixa de -999 a 9999 U.E. ( v ) O limite inferior do sinal de entrada não pode ser maior que o limite superior; Para DMY-2030-F e TY-2090-F, os limites inferior e superior correspondem à faixa de 0 a 30000 impulsos. ( vi ) Para DMY-2032, utilizar faixa de -999 a 9999 U.E. ( vii ) Para DMY-2030 e DMY-2030-F, a U.E. refere-se sempre ao canal 1 para o registro 97 e ao canal 2 para o registro 98; Para TY-2090 e TY-2090-F, a U.E. é dependente do registro 27 para o registro 97 e é dependente do registro 28 para o registro 98. ( viii ) O limite inferior do sinal de retransmissão da saída não pode ser maior que o limite superior;