





























































































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Engenharia de Sistemas e Controle Norma Nise
Tipologia: Notas de estudo
1 / 720

Esta página não é visível na pré-visualização
Não perca as partes importantes!
j t i v a t E ^ t U ^ M t é M Ò M S i s t e m a s d e C o n i r ó l è d o M u n d o R e a l
Mvíanuo doa ^h!Uló ^í-yiJ-íiíjii^ íío oacôroJoym;;) 3r odTdOR!di:alNadaRn:xoí: TiTyTido, f'Àí rú o ^bii (,[\u) JüKtp? õ í í l í í í. í í>>í.^íííii 3^íj e/^oí)' íí o;jjj íí o/jí.f/'.ebí o'a/jdo.ú] ue:j ü-5Üyjí í;ííj u í ríJOi}í ifMí/£-ÍUíí MVÍJí U>Jj-i-P> f3^^‘Xíj í:Íííy FpSr.-/j; oí o;i_[;^;í pj ai j ^ji^rà e uii i íj'I 7ííyí rry. atúr •i!'«0!;);i>nlu;j(:i;íi;;O r^i). ^ri;<1íJfííío;; - i p^vf - i ví i U:í ií!f;üo íog]t;o 0;proMrc^^iY<) ':u^^íoíi^ôió' í? ;.s;róiuí-j
Tadva pata -a -adiar dana ;7]>ad/<,a ^oiijiuTo T^TadiTi -;o/(hia-iíivíjlvíni ííKo a|y .p/pj^-j
y;tu/.;pi)/l) Jíi éi5>ò-i -á■ídoífíi y ü?;U/i^:^VÍdl uOíV!uj "Ü Oiji a i Ej ti yTyj íj Í: eIJríÜiíi!í!/'õV:il'u:UU/úI]'í yV;j :-V'Jcí 33]Oíí iiLí Ê^q 0 jj tJd;ai\Ív^rB' [J újr^; büiltíií È:jSpd fjpJí)i5IMeJ õ./jyõviíp 1 íí ãUi'! ^ ííJj - í j )í i:Oií rj pãui)l|j Lí^tífii òii\íIíí v-í^èJ^.e--;i 0
e ç * p $ ; í ^ £ j ( j ^ ^
imi ?/ii y b00UÍÍJryíã-^ í í ifejjí ó4lvííiíjif ^ íj ^ hü! u0|ií cüüu^í)IjjM(Jüipí íj'1í loj^iftly ípi^|?i|yú vdy^ .:.^py
i.í<jfadda yjm i-ÍE L ru iiu p a -yy^M u d m ú> y-ialby:ç-xíy ;;raj;>':-ató Típa/id do r üadua, .b u x íTíÍdlíJü úr> iran.üxty y paTiio _:X ( l i n U i ^ > l \ i n v ) 4 ^ H _ u> díu>ííyoy^ íí;*;íí,ím!'íy ay:x!rnaaííy;j]'y-yi: njaurui.íi^pyiii ida aa^JiiiíílLddady. -Ay d -;: .' -'A y ';. ' , A Ay. : -' '. .y ' yd A; :y- ; • • • • •. •• •.
Ítí fjí^ ijj í:;vs!>yííPÍjjo ij ê üíf ey^OiíyD^f ^ Oy_M "í lipi í.üídj fj/ íi;o era rd aad 1ii;aj;fayysy;fanpdyyiy;d'K(afÍ!i ddlHTiiu ’yi^HdPi-d^iyiiic.da^aídaírdn dia aiAil íy y dy/priíjy':y a y y;alí>aau;dU[iíd/íyv/yr:a;ddP}yyi:yyíia;dpil^naíd:.Pud()>yó'PíH;dodaí'; a # d ’í;o^divVnxvd^ yn dyyujiddy) x a T A x A j
^-ríbidiiiy^Noy-jOyuid^Jiínd-p^íUolfaríMjííHíliHyitridlcjaíiadúilyyíiií^i;^ jis; • / : •. ; / ; ' ;yy ....: A y :■.
;j ; yyyLí.éi^rjí0;f Lõyji.O ybííl V-^6/.|u ^jíx) çieyjjfj yiíí^/iyi;I.yJ; üíyí í ;d üJi d.y -Yyíi|aP,doüíí ].ü,ii pliçy/jd ^ ^i.Pj.aij ydp
i;íjífú <■ftTÍ fiúdí ij|\i rdViyiyíüjÍ£|ÜÍd/a-5 I ^ bMfíí fj op-l| Oíyp?^j/yjai dtjòijfplí&íI<j fJr.Ípiíf^ ^lí j rjy êu;í] u yVIfÀ ^ d i à í j j yí jí fd£jejj
Iji DaH' up(riíyii^o^d 1^^(1 èpvdiJUy ^ady y^= ’;yy ;vy;.. dd d..d^ ^ ^ ^ ^ ^^^ ^y v :, -y ^y - y ^ r ?r. pcdyy
'--I}ü « 3 -'ÜO'Wíü>=.:jài?/üí hi-s)v ife --y if* }iií'31"^a/ôliísX>ií^-rã'-»ídüjíiíãp.iíijívõi;;/ y i n Ti Ax Af i o andaia^rda AArííyi:
i:0}E^vAy/;/lly7iaoi;rÁaollaf,’^iííaa:. : rydÃ_ :. A d y 'A. d d y dy
y^^ dlr-Vd(|Í'd(dj^f:KÕ©í d:yy P d}yyíd1 1 1 | í í it:
N.Chain. 629.8 N724e 2002
189373 138955
Ex.4 RJNOIXSC LES
ENGENHARIA DE
SISTEMAS DE
CONTROLE
M3PDEA
Associação Brasileira para a Proteção dos Direitos Editoriais e Autorais R e s p e i t e o A u t o r N ã o F a ç a C ó p i a
No interesse de difusão da cultura e do conhecimento, o autor e os editores envidaram o máximo esforço para localizar os detentores dos direitos autorais de qualquer material utilizado, dispondo-se a possíveis acertos posteriores caso, inadvertidamente, a identificação de algum deles tenha sido omitida.
Control Systems Engineering, Third Edition Copyright © 2000 John Wiley & Sons, Inc. All Rights Reserved. Authorized translation from the English language edition published by John Wiley & Sons, Inc,
Direitos exclusivos para a língua portuguesa Copyright © 2002 by LTC — Livros Técnicos e Científicos Editora S.A. Travessa do Ouvidor, 11 Rio de Janeiro, RJ — CEP 20040- Tel.: 21-2221- Fax: 21-2221-
Reservados todos os direitos. É proibida a duplicação ou reprodução deste volume, no todo ou em parte, sob quaisquer formas ou por quaisquer meios (eletrônico, mecânico, gravação, fotocópia, distribuição na Web ou outros) sem permissão expressa da Editora.
À minha esposa , Ellen;
aos meus filhos, Benjamin e Alan
e à minha filha, Sharon.
Prefácio
Este livro apresenta aos estudantes a teoria e a prática da engenharia de sistemas de controle. O texto enfatiza as aplicações práticas da matéria à análise e ao projeto de sistemas com retroação. O estudo de engenharia dos sistemas de controle é essencial para os alunos de graduação em engenharia elétri ca, mecânica, controle e automação, aeroespacial1ou engenharia química. Os sistemas de controle são encontra dos em uma ampla gama de aplicações nessas áreas, desde aviões e espaçonaves a robôs e sistemas de controle de processos. Engenharia de Sistemas de Controle é uma obra voltada para estudantes de cursos superiores e para aqueles que desejam dominar o assunto através de estudo próprio. Os estudantes usuários deste texto devem ter concluído os cursos básicos em física e em matemática, por meio de equações diferenciais. Outros materiais que dizem res peito ao conhecimento prévio requerido, incluindo transformadas de Laplace e álgebra linear, são incorporados ao texto, seja ao longo das discussões dos capítulos, seja separadamente nos apêndices ou no CD-ROM que acompa nha o livro. Este material de revisão pode ser omitido sem perda de continuidade para os estudantes que não pre cisam dele.
Características Principais
Constituem características principais desta terceira edição: ■ Organização padronizada dos capítulos
■ Explanações qualitativas e quantitativas ■ Exemplos, exercícios de avaliação e estudos de caso ao longo do texto
■ Ilustrações abundantes
■ Numerosos problemas de fim de capítulo ■ Ênfase no projeto
■ Organização flexível
■ Ênfase na análise e no projeto com auxílio de computador
Vejamos cada uma destas características com mais detalhe.
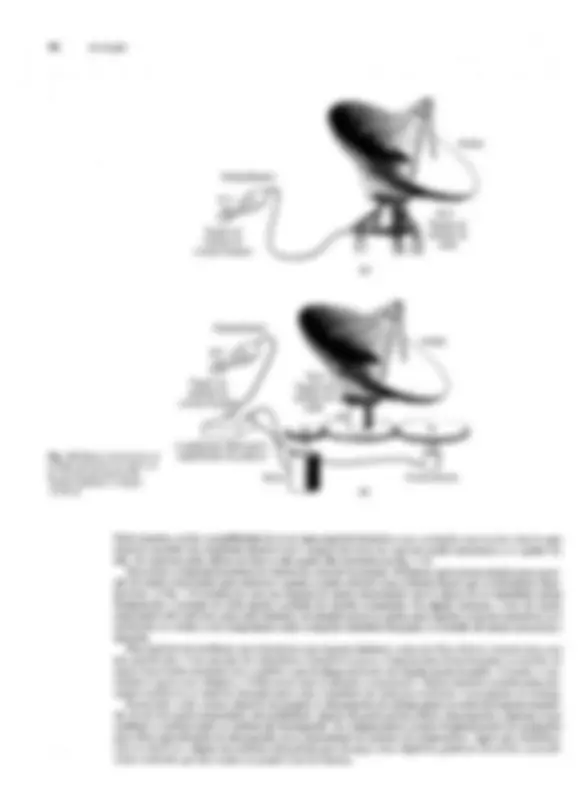
Organização Padronizada dos Capítulos Cada capítulo começa com uma lista de objetivos do capítulo seguida de uma lista de objetivos dos estudos de caso relacionando os objetivos do capítulo com o desempenho específico do estudante na solução de um problema prá tico como o sistema de controle do posicionamento de uma antena em azimute. Os tópicos são então divididos em seções numeradas e com título contendo explanações, exemplos e, onde apropriado, exercícios de avaliação com respostas. Estas seções numeradas são seguidas de um ou mais estudos de caso, como resumido a seguir. Cada capítulo se encerra com um breve resumo, com diversas perguntas de revisão que requerem respostas curtas e um conjunto de tarefas a domicílio.
‘No Brasil, Engenharia Aeronáutica. (N.T.)
Explanações Qualitativas e Quantitativas As explicações são claras e completas e, quando apropriado, incluem uma breve revisão dos fundamentos. Os tó picos são elaborados a partir dessa base e se apóiam uns nos outros de forma lógiea. Os fundamentos e a termino logia sobre novos conceitos são cuidadosamente colocados para evitai' sobrecarregar o estudante e facilitar o estu do autoclidático. Embora as soluções quantitativas sejam, como é óbvio, importantes, uma compreensão qualitativa ou intuitiva dos problemas e dos métodos de solução é vital para produzir uma visão de conjunto necessária para o desenvol vimento completo de projetos. Portanto, sempre que possível, os novos conceitos são discutidos a partir de uma perspectiva qualitativa antes da análise e do projeto quantitativos. Por exemplo, no Cap. 8, o estudante pode sim plesmente observar o lugar das raízes e descrever qualitativamente as alterações na resposta transitória que irão ocorrer à medida que um parâmetro de sistema, como o ganho, é variado. Esta habilidade é desenvolvida com o auxílio de algumas equações simples do Cap. 4.
Exemplos, Exercícios de Avaliação e Estudos de Caso As explanações são ilustradas com clareza por meio de diversos exemplos numerados e identificados ao longo do texto. Onde apropriado, as seções são encerradas com exercícios de avaliação. São exercícios de cálculo, a maioria com respostas, os quais testam a compreensão e fornecem retomo imediato. As soluções completas podem ser encontradas no CD-ROM que acompanha o livro. Exemplos mais abrangentes na forma de estudos de caso podem ser encontrados depois da última seção nume rada de cada capítulo, com exceção do Cap. 1. Estes estudos de caso são problemas de aplicação prática que de monstram os conceitos introduzidos no capítulo. Cada estudo de caso termina com um problema desafiador sobre o qual os estudantes podem trabalhar a fim de testar sua compreensão sobre o material. Um dos estudos de caso, relativo ao sistema de controle do posicionamento de uma antena em azimute é tratado ao longo de todo o livro. A finalidade é ilustrar a aplicação de novos conhecimentos em cada capítulo ao mesmo sistema físico, enfatizando assim a continuidade do procedimento de projeto. Um outro estudo de caso mais desa fiador, envolvendo um veículo submersível autônomo não-tripulado, UFSS (Unmmned Free-Swimming Submersihle Vehicle ) é desenvolvido ao longo de cinco capítulos.
Ilustrações Abundantes
A capacidade para visualizar conceitos e procedimentos é crítica para a compreensão do estudante, Por esta razão, aproximadamente 750 fotos, diagramas, gráficos e tabelas aparecem ao longo do livro para ilustrar os tópicos em discussão.
Numerosos Problemas de Fim de Capítulo Cada capítulo termina com uma variedade de tarefas a domicílio que permitem ao estudante testai’ sua compreen são sobre o material apresentado no capítulo. Os problemas variam em grau de dificuldade e em complexidade, e a maioria dos. capítulos incluí diversos problemas práticos, da “vida real” para ajudar a manter a motivação dos estudantes. Além disso, as tarefas a domicílio incluem um problema progressivo de análise e de projeto que utiliza o mesmo sistema prático para demonstrar os conceitos de cada capítulo.
Ênfase em Projeto
Este texto coloca uma grande ênfase em projeto. Os Caps. 8 ,9 ,1 1 ,1 2 e 13 enfocam fundamentalmente o projeto. Porém, até mesmo nos capítulos que enfatizam a análise, são incluídos exemplos simples de projeto sempre que possível. _ _ _ _ _ _ _ Ao longo do livro, os exemplos de projeto envolvendo sistemas físicos são identificados por um ícone Os problemas de fim de capítulo que envolvem o projeto de sistemas físicos são grupados sob o título de Problemas de Projeto e, também, nos capítulos que cuidam de projeto sob o título Problema Progressivo de Análise e de Projeto. Nestes exemplos e problemas, especifica-se uma resposta desejada e o estudante deve calcular os valores de certos parâmetros de sistema, como o ganho, ou especificai* uma configuração de sistema juntamente com valores de parâ metro. Ademais, o texto inclui numerosos exemplos de projeto e problemas (não identificados por um ícone) que envolvem sistemas puramente matemáticos. Como a visualização é tão vital na compreensão do projeto, este texto relaciona cuidadosamente as especificações indiretas de projeto com as mais familiares. Por exemplo, a margem de fase menos familiar e indireta é cuidadosa mente relacionada com a ultrapassagem percentual mais direta e fainiliai* antes de ser utilizada como especificação de projeto. Para cada tipo geral de problema de projeto introduzido no texto é apresentada uma metodologia para resolver o problema. Em muitos casos, na forma de procedimento passo a passo, começando com um enunciado dos obje-
do plano s está também no lugar das raízes, (2) obter dados da resposta de magnitude e de fase para os diagramas de Nyquist e de Bode e (3) passar de uma a outra entre as seguintes representações de um sistema de segunda ordem: ■ Localização de pólos em coordenadas polares m Localização de pólos em coordenadas cartesianas
As calculadoras manuais apresentam a vantagem da facilidade de acesso nas tarefas a domicílio e nos exames. Por obséquio, queira consultar o Apêndice H, localizado no CD-ROM que acompanha este livro, para uma discussão sobre auxílios computacionais que podem ser adaptados a calculadoras portáteis. Os computadores pessoais são melhor adaptados para aplicações mais intensas em cálculos computacionais, como traçado de respostas no tempo, lugar das raízes, curvas de resposta de freqüência, bem como obtenção de matrizes de transição de estados. Estes computadores também fornecem ao estudante um ambiente do mundo real no qual podem analisar e projetar sistemas de controle, Aqueles que não estejam usando o MATLAB podem es crever seus próprios programas ou usar outros programas, como o Program CC. Sem o acesso a computadores ou a calculadoras programáveis, os estudantes não podem obter resultados signi ficativos de análise e de projeto e a experiência de aprendizado será limitada.
Novidades desta Edição
Nesta terceira edição, revisamos e acrescentamos material em resposta às sugestões de estudantes e de professores que adotaram a segunda edição do texto, A lista que se segue descreve as mudanças principais na terceira edição:
Problemas de fim de capítulo Há pelo menos 30% de alterações nos problemas de fim de capítulo. Os problemas velhos foram revisados e novos problemas foram incluídos, Um problema prático progressivo de análise e de pro jeto, que utiliza o mesmo sistema físico, foi acrescentado ao conjunto de problemas de cada capítulo.
MATLAB O uso do MATLAB para análise e projeto auxiliado por computador cbntinua a ser integrado nas dis cussões e nos problemas como um recurso ótimo na terceira edição, O tutorial sobre o MATLAB foi atualizado para a Versão 5 do MATLAB e para a Versão 4 da Toolbox de Sistemas de Controle.
SIMULINK®3 do MATLAB O Simulink foi adicionado para mostrar os efeitos de não-linearidades na resposta temporal de sistemas a malha aberta e a malha fechada. Usamos o Simulink também para demonstrar como simu lar sistemas digitais, Para auxiliá-lo foi adicionado um apêndice tutorial cobrindo os fundamentos do Simulink.
Ferram entas GUI do MATLAB Duas ferramentas do MATLAB que utilizam Interfaces Gráficas de Usuário (GUI — Gmphical User Interface ) fazem sua estréia nesta 3.a edição. A primeira é o visualizador de objetos line ares e invariantes no tempo, LTI Viewer , uma ferramenta conveniente para avaliar características dos gráficos de respostas de sistemas nos domínios do tempo e de freqüência. A segunda ferramenta é a interface gráfica de usu ário para projeto empregando o lugar das raízes, Root Locus Design GUI, uma ferramenta conveniente e intuitiva para análise e projeto com o lugar das raízes. Para ajudá-lo, foi incluído um apêndice tutorial sobre as ferramentas GUI do MATLAB.
Toolbox de M atemática Simbólica do MATLAB A Toolbox de Matemática Simbólica do MATLAB foi incluí da em seções apropriadas como recurso opcional de auxílio ao cálculo. Para auxiliá-lo, foi incluído um apêndice tutorial sobre os fundamentos da Toolbox de Matemática Simbólica {Symbolic Math Toolbox).
Exercícios de avaliação Exercícios selecionados com respostas foram acrescentados ao final de seções apropria das. Estes exercícios dão aos estudantes um retorno imediato através do qual podem medir o aprendizado do co nhecimento básico da seção.
■'Simulink 6 uma marca comercial registrada da The Math Works, Inc,
Problem as progressivos de análise e de projeto Foi acrescentado ao final do conjunto de problemas de cada capítulo, um problema progressivo de análise e de projeto. Este problema dá a você a oportunidade de aplicar pro gressivamente as lições de análise e de projeto de cada capítulo ao mesmo sistema físico.
CD-ROM Um CD-ROM acompanha o texto. Apêndices e seções selecionadas da segunda edição foram desloca das para o CD-ROM para liberar espaço para o material de texto adicional, O disco contém o seguinte: ■ Todos os arquivos M (M-files) usados nos tutoriais do MATLAB, no Simulink, nas Ferramentas GUI e na Toolbox de Matemática Simbólica ■ Arquivos PowerPoint®4 e Acrobat®5 contendo figuras selecionadas do texto ■ Soluções dos exercícios de avaliação
■ Apêndice B da segunda edição: Matrizes, Determinantes e Sistemas de Equações ■ Apêndice D, Seção 4.11 e todo o material da segunda edição que trata do uso da análise e do projeto auxiliados por computador que não usa o MATLAB. Tudo foi revisado e reunido em um único apêndice, apresentando alternativas ao MATLAB. ■ Apêndice F da segunda edição: Solução das Equações de Estado para t0 A 0. ■ Apêndice G da segunda edição: Regras do Lugar das Raízes: Dedução ícones Diversos ícones foram acrescentados à terceira edição para identificar a cobertura de material opcional. Especificamente, ícones do Simulink, das Ferramentas GUI do MATLAB (LTI Viewer e RootLocus Design GUI) e da Toolbox de Matemática Simbólica foram adicionados aos ícones anteriores do MATLAB, do espaço de esta dos e de projeto. Os ícones são resumidos a seguir:
Prefácio xi
O ícone MATLAB identifica discussões, exemplos, exercícios e problemas com MATLAB. A cobertura do MATLAB é fornecida como um aprimoramento e não é necessária para se usar o texto.
O ícone Simulink identifica discussões, exemplos, exercícios e problemas com Simulink. A cobertura do Simulink é fornecida como um aprimoramento e não é necessária para se usar o texto.
O ícone Ferramenta GUI identifica discussões, exemplos, exercícios e problemas com Ferramentas GUI do MATLAB. A discussão das ferramentas, que inclui o visualizador LTI Viewer e o Root Locus Design GUI, é for necida como um aprimoramento e não é necessária para se usar o texto.
O ícone Matemática Simbólica identifica discussões, exemplos, exercícios e problemas com &Toolbox de Mate mática Simbólica. A cobertura da Toolbox de Matemática Simbólica é fornecida como um aprimoramento e não é necessária para se usar o texto.
O ícone Espaço de Estados destaca discussões, exemplos, exercícios e problemas no espaço de estados. Como o MATLAB, o material sobre espaço de estados é opcional e pode ser omitido sem perda de continuidade.
O ícone Projeto identifica claramente os problemas dé projeto envolvendo sistemas físicos.
Capítulo 4 Os efeitos das não-linearidades sobre a resposta no domínio do tempo de sistemas a malha aberta usan do o Simulink foram adicionados ao Gap, 4. As relações entre tempo de subida e relação de amortecimento foram
Pow erPoint é uma marca registrada da Microsoft Corporation. sAcrobat é lima marca registrada da Adobe Systems Incorporated.
Prefácio xiii
Os Caps. 2, 3 e 5 tratam da representação de sistemas físicos. Os Caps. 2 e 3 cobrem a modelagem de sistemas a malha aberta usando técnicas de resposta de freqüência e técnicas do espaço de estados, respectivamente. O Cap. 5 discute a representação e a redução de sistemas formados por subsistemas a malha aberta interconectados. Somente algumas amostras representativas de sistemas físicos podem ser tratadas em um livro com esta extensão. Sistemas elétricos, mecânicos (em translação e em rotação) e eletromecânicos são usados como exemplos de sistemas físicos que são modelados, analisados e projetados. A linearização de um sistema não-linear— técnica usada pelo engenhei ro para simplificar um sistema no sentido de representá-lo matematicamente — também é apresentada. O Cap. 4 propicia uma introdução à análise de sistemas, isto é, a obtenção e a descrição da resposta de um sistema. Poderia parecer mais lógico inverter a ordem dos Caps. 4 e 5, para apresentar o material do Cap. 4 junto com os outros capítulos que cobrem a análise. Contudo, muitos anos ministrando sistemas de controle ensinaram que quanto mais cedo os estudantes virem uma aplicação do estudo da representação de sistemas, maior será o nível de motivação. Os Caps. 6, 7, 8 e 9 retornam à análise e projeto de sistemas de controle com o estudo de estabilidade (Cap. 6), de erro de estado estacionário (Cap. 7) e de resposta transitória de sistemas de ordem elevada usando técnicas do lugar das raízes (Cap. 8). O Cap. 9 cobre o projeto de compensadores e de controladores usando o lugar das raízes. Os Caps. 10 e 11 focalizam a análise e o projeto no domínio de frequência senoidal. O Cap. 10, como o Cap. 8, cobre os conceitos básicos da análise de estabilidade, de resposta transitória e de erro de estado estacionário. Con tudo, os métodos de Nyquist e de Bode são usados em substituição ao lugar das raízes. O Cap. 11, como o Cap. 9, cobre o projeto de compensadores, mas do ponto de vista das técnicas de resposta de frequência senoidal em vez do lugar das raízes. Uma introdução ao projeto no espaço de estados e à análise e projeto de sistemas de controle digital completam o texto nos Caps. 12 e 1.3, respectivamente. Embora estes capítulos possam ser usados como introdução para estudantes que prosseguirão seu estudo de engenharia de sistemas de controle, eles são úteis por si mesmos e como um suple mento à discussão sobre análise e projeto dos capítulos anteriores. Não é possível apresentar em dois capítulos um tratamento completo sobre o tema, mas a ênfase é resumida e relacionada de forma lógica ao restante do livro.
0 Pacote de Recursos de Ensino
O seguinte material compreende o pacote de recursos de ensino da terceira edição do livro Engenharia de Sistemas de Controle.
PowerPoint e A crobat Lecture Graphics As figuras-chave do texto estão disponíveis em gráficos eletrônicos em cores por meio de arquivos em PowerPoint e em pdf do Adobe Acrobat. Estes arquivos podem ser encontrados no CD-ROM que acompanha o livro e no site da Wiley, na Internet.
Toolbox de Engenharia dc Sistemas de Controle Todos os arquivos .m do MATLAB e do Simulink usados nos apêndices deste livro podem ser encontrados no CD-ROM e no site da Wiley, na Internet.
Manual de Soluções para Engenharia de Sistemas de Controle , 3.“ edição de autoria de Norman S. Nise. Este manual contém soluções detalhadas da maioria dos problemas no texto. O Manual de Soluções é disponível so mente para professores qualificados.
Agradecimentos
O autor gostaria de agradecer aos colegas da Califórnia State Polytechnique University, em Pomona, que contribu íram para esta e para as edições anteriores de Engenharia de Sistemas de Controle. Sem o seu apoio este volume talvez não tivesse acontecido. Aos que contribuíram para esta terceira edição, meus agradecimentos especiais aqui. O apoio contínuo ao longo de todas as fases deste projeto do Electrical and Computer Engeneering Department e do seu Chefe, Yi Cheng, bem como do College of Engineering e do seu Diretor, Edward Hohmann foi inestimável para a conclusão deste trabalho. Esta terceira edição foi completamente revista e verificada por meu colega M. Samy El-Sawah e por este traba lho agradecemos eu e os estudantes que a lêem. Gostaria de externar um agradecimento especial a meus estudantes que usaram as edições anteriores ao longo dos últimos oito anos. Suas sugestões para esta nova edição foram inestimáveis. Em particular, quero agradecer a Michael House pelas muitas sugestões que me deu. Os polinómios de tempo de subida no Cap. 4 são um resultado direto de suas sugestões e do seu esforço. Minha gratidão é estendida a Alan H. Nise pelas inúmeras horas gastas em criar aplicações isoladas de resposta em função do tempo e de análise e projeto com lugar das raízes incluídas no CD-ROM que acompanha o livro. Estes programas serão apreciados certamente pelos leitores que não têm acesso ao MATLAB. O autor gostaria de agradecer a todos os revisores cujo domínio do assunto e cuja atenção a detalhes digna de louvores produziram muitas sugestões para melhorias desta terceira edição. Os revisores são os seguintes docen-
tes: Darren Dawson, Clemson University, Mahlon D. Heller, Califórnia State University, Sacramento; Vojislav D. Kalanovic, South Dakota School of Mines and Technology; Leslie R. Koval, The University of Missouri-Rolla; Marca J. Lam, The Cooper Union for the Advancemeiit of Science and Aít; Fu Li, Portland State University; Jure Medanic, University of Illinois em Urbana-Champaign; Medhat M. Morcos, Kansas State University; Satish S. Nair, University of Missouri, Columbia; Charles P, Neumann, Carnegie Mellon; J. William Ray, Jr„ Lonisiana Tech University; e Michael J. Rider, Ohio Northern University. Gostaria também de expressar meu reconhecimento a Wayne E, Whiteman, Academia Militar dos Estados Unidos, pelo envio voluntário de numerosas sugestões para melhorar o conteúdo e a exatidão. Antes da transferência deste título para a John "Wiley & Sons, Inc. diversas pessoas nos deram orientação pre ciosa e auxiliaram nos estágios iniciais de desenvolvimento desta terceira edição. Sou grato por suas contribui ções. Em particular quero agradecer ao seguinte pessoal da Addison-Wesley: Paul Becker, Editor de Aquisições; Anna Eberhard Friedlander, Editora Assistente; e Royden Tonomura, Assistente de Editorial. Durante sua breve transferência para a Prentíce Hall, Tom Robbins, Editor, conduziu este título ao longo do seu desenvolvimento. B, naturalmente, o autor gostaria de agradecer à John Wiley & Sons, Inc. e à sua equipe pelo suporte profissio nal fornecido a este projeto ao longo de todas as fases do seu desenvolvimento. Especificamente, devemos reco nhecimento às seguintes pessoas por suas contribuições: Peter M. Janzow, Editor, que deu pleno suporte executivo a todo o projeto; Bíll Zobrist, Editor de Aquisições, que forneceu orientação editorial profissional; Jennifer Welter, Assistente de Editorial, que sempre esteve lá para responder pontualmente as minhas inúmeras perguntas; e Robin Factor, Editor de Produção Sênior, que verificou o livro ao longo de todas as fases de produção. Gostaria também de agradecer a Karín Kincheloe, Projetista Sênior, pela contribuição na impressionante capa; a Lisa Gee, Editora de Fotografia, pela pesquisa das novas fotos que você vê no livro; e Katherine Hepburn, Gerente de Marketing, por fazer com que você tome conhecimento da existência deste livro. Há outros a agradecer; especialmente aqueles com quem não tive o prazer de interagir pessoalmente, mas cujas contribuições são, contudo, inestimáveis. Finalmente, os créditos vão para os Serviços de Publicação e sua equipe pela produção da versão final do livro sob grande pressão e limitação de tempo. Especificamente, quero agradecer a Jan Fisher, Representante do Aten dimento ao Cliente, por pavimentar suavemente os meios de produção e encampar minhas muitas indagações, Além disso, devo um obrigado a Bílal Dardai, Editor, e a Ken Churchill, Coordenador de Produção pela edição e produ ção finais do livro em um espírito de colaboração. Especialmente apreciada sua disposição de efetuar refinamentos de última hora que serão apreciados pelo leitor.
Norman S. Nise