



ABB Flexible Automation
Product On-line Manual
IRB 1400
Please Click the Picture
to continue
3HAC 2914-1
M98


























































































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Simulador Robo ABB,nao tenho certeza se funciona no win 7,8,qualquer coisa instale uma maquina virtual com xp.Caso nao consigam instalar entre em contato. [email protected]
Tipologia: Notas de estudo
1 / 406

Esta página não é visível na pré-visualização
Não perca as partes importantes!
The information in this document is subject to change without notice and should not be construed as a commitment by ABB Robotics Products AB. ABB Robotics Products AB assumes no responsibility for any errors that may appear in this document.
In no event shall ABB Robotics Products AB be liable for incidental or consequential damages arising from use of this document or of the software and hardware described in this document.
This document and parts thereof must not be reproduced or copied without ABB Robotics Products AB´s written permission, and contents thereof must not be imparted to a third party nor be used for any unauthorized purpose. Contravention will be prosecuted.
Additional copies of this document may be obtained from ABB Robotics Products AB at its then current charge.
© ABB Robotics Products AB
Article number: 3HAC 2914- Issue: M
ABB Robotics Products AB S-721 68 Västerås Sweden
Description
20 Product Specification IRB 1400 M97A/BaseWare OS 3.
Introduction
Page
Product Manual 1
1 How to use this Manual........................................................................................... 3 2 What you must know before you use the Robot ................................................... 3 3 Identification ............................................................................................................ 4
Introduction
Product Manual 3
Introduction
This manual provides information on installation, preventive maintenance, trouble- shooting and how to carry out repairs on the manipulator and controller. Its intended audience is trained maintenance personnel with expertise in both mechanical and electrical systems. The manual does not in any way assume to take the place of the maintenance course offered by ABB Flexible Automation.
Anyone reading this manual should also have access to the User’s Guide.
The chapter entitled System Description provides general information on the robot structure, such as its computer system, input and output signals, etc.
How to assemble the robot and install all signals, etc., is described in the chapter on Installation and Commissioning.
If an error should occur in the robot system, you can find out why it has happened in the chapter on Troubleshooting. If you receive an error message, you can also consult the chapter on System and Error Messages in the User’s Guide. It is very helpful to have a copy of the circuit diagram at hand when trying to locate cabling faults.
Servicing and maintenance routines are described in the chapter on Maintenance.
All personnel working with the robot system must be very familiar with the safety regulations outlined in the chapter on Safety. Incorrect operation can damage the robot or injure someone.
Introduction
4 Product Manual
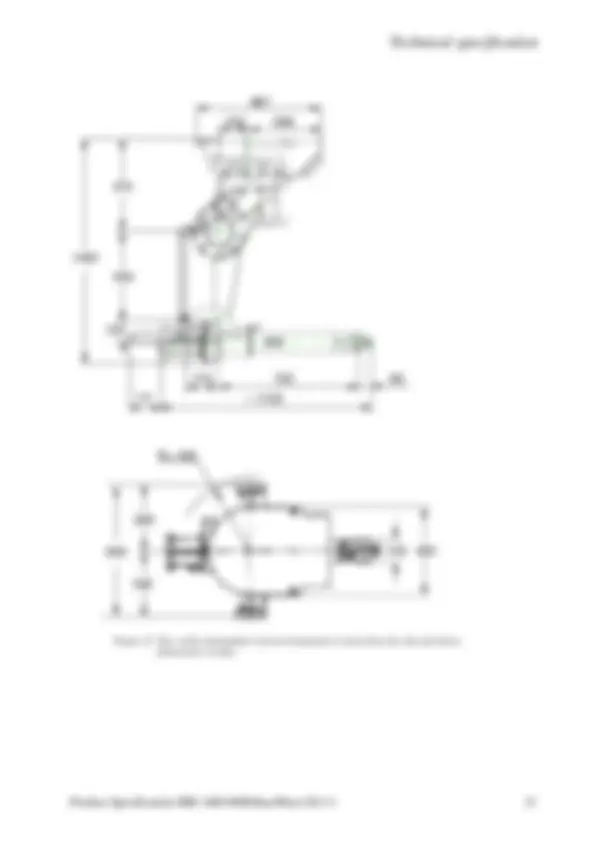
Identification plates indicating the type of robot and serial number, etc., are located on the manipulator (see Figure 1) and on the front of the controller (see Figure 2). The BaseWare O.S diskettes are also marked with serial number (see Figure 3). Note! The identification plates and label shown in the figures below, only serves as examples. For exact identification see plates on your robot in question.
Figure 1 Example of identification plate and it’s location on different manipulator types.
S-721 68 Västerås Sweden Made in Sweden
ABB Robotics Products AB
Type: Robot version: Man. order: Nom. load Serial. No: Date of manufacturing: Net weight 2,4.120 : 1870 kg 2,4-150 : 2010 kg 2,8-120 : 2010 kg
IRB 6400 M IRB 6400/2.4- XXXXXX See instructions 6400-XXXX 1997-XX-XX
3.0-75 : 2010 kg S/2,9-120 : 2240 kg PE/2,25-75 : 1590 kg
Identification plate showing the IRB 6400
Introduction
6 Product Manual
Introduction
Product Specification IRB 1400 M98/BaseWare OS 3.1 3
1 Introduction
Thank you for your interest in the IRB 1400. This manual will give you an overview of the characteristics and performance of the robot.
IRB 1400 is a 6-axis industrial robot, designed specifically for manufacturing industries that use flexible robot-based automation. The robot has an open structure that is specially adapted for flexible use, and can communicate extensively with external systems.
The robot is equipped with an operating system called BaseWare OS. BaseWare OS controls every aspect of the robot, like motion control, development and execution of application programs communication etc.
The functions in this document are all included in BaseWare OS, if not otherwise specified. For additional functionality, the robot can be equipped with optional software for application support - for example gluing and arc welding, communication features - network communication - and advanced functions such as multitasking, sensor control etc. For a complete description on optional software, see the Product Specification RobotWare.
All the features are not described in this document. For a more complete and detailed description, please see the User’s Guide, RAPID Reference Manual and Product Manual, or contact your nearest ABB Flexible Automation Centre.
Different robot versions
The IRB 1400, as mentioned above, is available in two different versions:
How to use this manual
The characteristics of the robot are described in Chapter 2: Description.
The most important technical data is listed in Chapter 3: Technical specification.
Note that the sections in chapter 2 and 3 are related to each other. For example, in section 2.2 you can find an overview of safety and standards, in section 3.2 you can find more detailed information.
To make sure that you have ordered a robot with the correct functionality, see Chapter 4: Specification of Variants and Options.
In Chapter 5 you will find accessories for the robot.
Chapter 6 contains an Index , to make things easier to find.
Introduction
4 Product Specification IRB 1400 M98/BaseWare OS 3.
Other manuals
The User’s Guide is a reference manual with step by step instructions on how to perform various tasks.
The programming language is described in the RAPID Reference Manual.
The Product Manual describes how to install the robot, as well as maintenance procedures and troubleshooting.
The Product Specification RobotWare describes the software options.
Description
6 Product Specification IRB 1400 M98/BaseWare OS 3.
The robot complies fully with the health and safety standards specified in the EEC’s Machinery Directives as well as ANSI/RIA 15.06-1992.
The robot is designed with absolute safety in mind. It has a dedicated safety system based on a two-channel circuit which is monitored continuously. If any component fails, the electrical power supplied to the motors shuts off and the brakes engage.
Safety category 3 Malfunction of a single component, such as a sticking relay, will be detected at the next MOTOR OFF/MOTOR ON operation. MOTOR ON is then prevented and the faulty section is indicated. This complies with category 3 of EN 954-1, Safety of machinery - safety related parts of control systems - Part 1.
Selecting the operating mode The robot can be operated either manually or automatically. In manual mode, the robot can only be operated via the teach pendant, i.e. not by any external equipment.
Reduced speed In manual mode, the speed is limited to a maximum of 250 mm/s (600 inches/min.). A speed limitation applies not only to the TCP (Tool Centre Point), but to all parts of the robot. It is also possible to monitor the speed of equipment mounted on the robot.
Three position enabling device The enabling device on the teach pendant must be used to move the robot when in man- ual mode. The enabling device consists of a switch with three positions, meaning that all robot movements stop when either the enabling device is pushed fully in, or when it is released completely. This makes the robot safer to operate.
Safe manual movement The robot is moved using a joystick instead of the operator having to look at the teach pendant to find the right key.
Over-speed protection The speed of the robot is monitored by two independent computers.
Emergency stop There is one emergency stop push button on the controller and another on the teach pendant. Additional emergency stop buttons can be connected to the robot’s safety chain circuit.
Safeguarded space stop The robot has a number of electrical inputs which can be used to connect external safety equipment, such as safety gates and light curtains. This allows the robot’s safety func- tions to be activated both by peripheral equipment and by the robot itself.
Delayed safeguarded space stop A delayed stop gives a smooth stop. The robot stops in the same way as at normal program stop with no deviation from the programmed path. After approx. one second the power supplied to the motors shuts off.
Description
Product Specification IRB 1400 M98/BaseWare OS 3.1 7
Restricting the working space The movement of each of the axes can be restricted using software limits. Axes 1 and 2 can also be restricted by means of an adjustable mechanical stop. Axis 3 can be restricted using an electrical limit switch.
Hold-to-run control “Hold-to-run” means that you must depress the start button in order to move the robot. When the key is released the robot will stop. The hold-to-run function makes program testing safer.
Fire safety Both the manipulator and control system comply with UL’s (Underwriters Laboratory) tough requirements for fire safety.
Safety lamp As an option, the robot can be equipped with a safety lamp mounted on the manipula- tor. This is activated when the motors are in the MOTORS ON state.
All operations and programming can be carried out using the portable teach pendant (see Figure 3) and the operator’s panel (see Figure 5).
Figure 3 The teach pendant is equipped with a large display, which displays prompts, information, error messages and other information in plain English.
Information is presented on a display using windows, pull-down menus, dialogs and function keys. No previous programming or computer experience is required to learn how to operate the robot. All operation can be carried out from the teach pendant, which means that a specific keyboard is not required. All information, including the complete programming language, is written in English or, if preferred, some other major language.
2
1
2 3 0
1
4 5 6
7 8 9
P
P1 P
Joystick Display
Emergency stop button
Description
Product Specification IRB 1400 M98/BaseWare OS 3.1 9
Using a key switch, the robot can be locked in two or three different operating modes depending on chosen mode selector:
Both the operator’s panel and the teach pendant can be mounted externally, i.e. outside the cabinet. The robot can then be controlled from there.
The robot can be remotely controlled from a computer, PLC or from a customer’s panel, using serial communication or digital system signals.
For more information on how to operate the robot, see the User’s Guide.
The robot has a standard configuration and can be operated immediately after installation. Its configuration is displayed in plain language and can easily be changed using the teach pendant. The configuration can be stored on a diskette and/or transferred to other robots that have the same characteristics.
There are two versions of IRB 1400, one for floor mounting and one for inverted mounting. An end effector, weighing a maximum of 5 kg, including payload, can be mounted on the robot’s mounting flange (axis 6). Other equipment, weighing a maximum of 10 kg, can be mounted on the rear of the upper arm.
Programming the robot involves choosing instructions and arguments from lists of appropriate alternatives. Users do not need to remember the format of instructions, since they are prompted in plain English. “See and pick” is used instead of “remember and type”.
The programming environment can be easily customised using the teach pendant.
Programs, parts of programs and any modifications can be tested immediately without having to translate the program.
The program is stored as a normal PC text file, which means that it can be edited using a standard PC.
100%
Description
10 Product Specification IRB 1400 M98/BaseWare OS 3.
Movements
A sequence of movements is programmed as a number of partial movements between the positions to which you want the robot to move.
The end position of a movement is selected either by manually jogging the robot to the desired position with the joystick, or by referring to a previously defined position.
The exact position can be defined (see Figure 6) as:
or
Figure 6 The fly-by point reduces the cycle time since the robot does not have to stop at the programmed point.The path is speed independent.
The velocity may be specified in the following units:
Program management
For convenience, the programs can be named and stored in different directories.
Areas of the robot’s program memory can also be used for program storage. This gives a very fast memory where you can store programs. These can then be automatically downloaded using an instruction in the program. The complete program or parts of programs can be transferred to/from a diskette.
Programs can be printed on a printer connected to the robot, or transferred to a PC where they can be edited or printed.
Stop point Fly-by point User-definable distance (in mm)