
Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Guias e Dicas


Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Encontrar documentos
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Encontra documentos específicos para os exames da tua universidade
Videoaulas
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Quiz
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Ensaio sobre Encoders Angulares, Notas de estudo de Mecatrônica
Neste documento, aprenda sobre encoders angulares, um tipo de sensor óptico utilizado na indústria para medir posição e velocidade. Saiba teorias básicas, como funcionamento, tipos e aplicação de encoders absolutos. Ensaie também a formulação para calcular a resolução e posição em graus.
Tipologia: Notas de estudo
2013

1 / 8

Esta página não é visível na pré-visualização
Não perca as partes importantes!



Documentos relacionados
Pré-visualização parcial do texto
Baixe Ensaio sobre Encoders Angulares e outras Notas de estudo em PDF para Mecatrônica, somente na Docsity!
Encoder Angular
Prof: [email protected]
- Familiarizar com tipo de encoder;
- Verificar o funcionamento de um Encoder Angular.
Objetivos
Introdução teórica
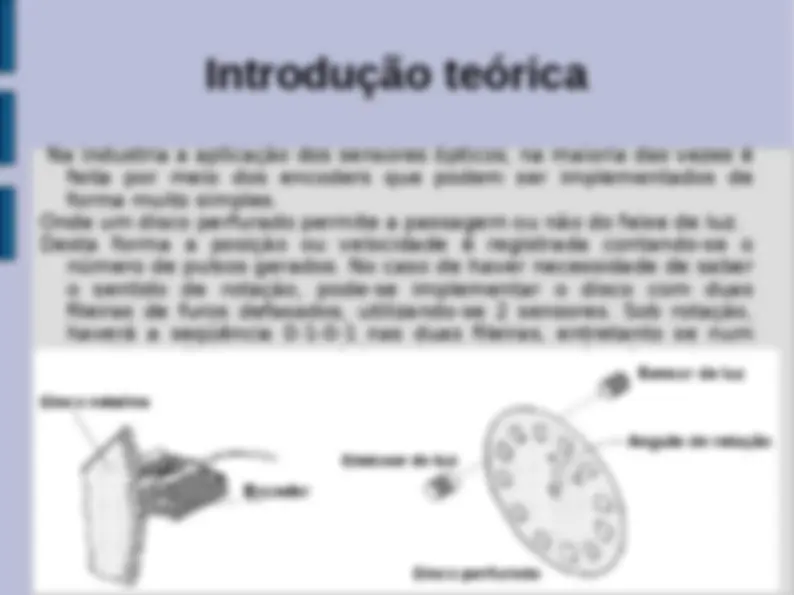
Na industria a aplicação dos sensores ópticos, na maioria das vezes é feita por meio dos encoders que podem ser implementados de forma muito simples. Onde um disco perfurado permite a passagem ou não do feixe de luz. Desta forma a posição ou velocidade é registrada contando-se o número de pulsos gerados. No caso de haver necessidade de saber o sentido de rotação, pode-se implementar o disco com duas fileiras de furos defasados, utilizando-se 2 sensores. Sob rotação, haverá a seqüência 0-1-0-1 nas duas fileiras, entretanto se num sentido a fileira mais próxima do centro estará adiantada em relação a segunda e vice versa.
Teoria
Existe ainda a possibilidade de obter-se a posição exata (ângulo de rotação) por meio de confecção adequada do disco com n fileiras de furos. Neste caso tem-se um código binário de n bits relativo a uma determinada posição. Este tipo de dispositivo é chamado de encoder absoluto.
Teoria
O encoder possui dois sensores com disco perfurada de único furo que determinam direção e controle. Quando o bit de controle (passo) sai do nível 0 para o nível 1 (borda de subida), com o bit de direção em nível 0, o motor está girando no sentido anti-horário. Quanto o bit de controle (passo) sai do nível 0 para o nível 1 (borda de subida), com o bit de direção em nível 1, o motor está girando no sentido horário. Para saber a resolução do encoder utiliza-se a expressão acima.
Teoria
Para saber quantos graus o motor girou, basta contar o número de pulsos do bit de passos e multiplicar pela resolução do encoder. Posição (em graus) = números de pulsos de passo x resolução do encoder.