


Cinemática de Mecanismos
2. Análise Descritiva de Mecanismos
Paulo Flores
J.C. Pimenta Claro
Universidade do Minho
Escola de Engenharia
Guimarães 2007







































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Sistemas mecânicos, de movimentos, de ângulos e cálculos geométricos e aritmeticos.
Tipologia: Manuais, Projetos, Pesquisas
1 / 48

Esta página não é visível na pré-visualização
Não perca as partes importantes!
Universidade do Minho Escola de Engenharia
2. ANÁLISE DESCRITIVA DE MECANISMOS 1
Though I am not over anxious after fame, yet I am more proud of the parallel motion than of any other mechanical invention I have ever made. James Watt
Um critério de classificação dos mecanismos é que tem como base o tipo de transformação do movimento entre os órgãos motor e movido. Os mecanismos podem transformar movimento de rotação em rotação, rotação em translação e translação em translação, como se ilustra e resume na figura 2.1.Nos mecanismos, as principais fontes geradoras de movimento são os actuadores de rotação, e.g. , motor eléctricos, e os actuadores de translação, e.g. , cilindros pneumáticos.
ROTAÇÃO ↔ ROTAÇÃO
ROTAÇÃO ↔ TRANSLAÇÃO
TRANSLAÇÃO ↔ TRANSLAÇÃO
Figura 2.1 – Tipos de transformação de movimento nos mecanismos.
2. ANÁLISE DESCRITIVA DE MECANISMOS 3
torno do eixo de rotação. Esta propriedade é importante porque os mecanismos são, em geral, accionados por motores eléctricos de movimento contínuo. Assim, os mecanismos articulados em que o órgão motor apenas oscila, dentro de uma determinada amplitude, não são apropriados para empregarem motores que geram movimento de rotação contínuo. No caso do mecanismo de quatro barras há uma regra geral e simples de aplicar que permite verificar se o órgão motor pode rodar continuamente em torno do eixo de rotação, ou, pelo contrário, se apenas pode oscilar numa determinada amplitude. Esta regra, dita regra de Grashof, pode enunciar-se do seguinte modo, “ para mecanismos de quatro barras que descrevem movimento plano, se a soma dos comprimentos das barras mais curta e mais comprida for inferior ou igual à soma dos comprimentos das duas restantes barras, então a barra mais curta pode rodar continuamente em relação às outras barras”. Matematicamente, o teorema de Grashof pode ser escrito da seguinte forma,
c + l ≤ r + s (2.1)
em que c é comprimento da barra mais curta, l é o comprimento da barra mais longa e r e s são os comprimentos das barras intermédias. Os mecanismos de quatro barras em que se verifica a condição expressa pela equação (2.1) chamam-se mecanismos de Grashof ou grashofianos. Caso contrário, os quadriláteros articulados denominam-se mecanismos de não-Grashof ou não grashofianos. A figura 2.3 ilustra dois mecanismos de quatro barras, sendo um deles, mecanismo de Grashof (figura 2.3a) e outro mecanismo de não-Grashof (figura 2.3b). No primeiro caso, a manivela 2 pode rodar continuamente em torno do eixo de rotação que passa em A , ao passo que no segundo exemplo, as barras 2 e 4 apenas oscilam dentro da amplitude representada na figura.
1
2
3
4
1
2
3
4
1 1 (a) (b)
B
A D
B
A
C C
D
Figura 2.3 – (a) Mecanismo de Grashof; (b) Mecanismo de não-Grashof.
Deve referir-se que no critério de Grashof nada é especificado quanto à sequência como as barras estão ligadas entre si, nem qual das barras é considerada fixa. Assim, nos mecanismos de Grashof em que a barra fixa é adjacente à mais curta, o mecanismo é denominado sistema de manivela e barra oscilante, como se mostra nas figuras 2.4a e 2.4c. Quando a barra mais curta é o fixe, as duas barras que lhe são adjacentes podem rodar continuamente, como é ilustrado na figura 2.4b. Este mecanismo é denominado sistema de dupla manivela, sendo, em geral, o órgão motor a barra mais curta de entre as barras adjacente ao fixe. Este tipo de mecanismo
4 CINEMÁTICA DE MECANISMOS
encontra grande número de aplicações em mecânica corrente. Quando num mecanismo de quatro barras se fixa a barra oposta à barra mais curta, embora a barra mais curta descreva rotações de 360º, nenhuma das barras adjacentes pode rodar continuamente, apenas podem oscilar, como ilustra a figura 2.4d. Este tipo de quadrilátero articulado é designado sistema de dupla barras oscilante.
s
r
l
(c) (d)
s
c
r
l
s
c
r l
s
c
r (^) l
c
(a) (b)
Figura 2.4 – Mecanismos de quatro barras de Grashof e de não-Grashof: (a) Sistema de manivela barra oscilante; (b) Sistema de dupla manivela; (c) Sistema de manivela barra oscilante; (d) Sistema duplamente oscilante ou de dupla barra oscilante.
Sendo o quadrilátero articulado um dos mais simples e versáteis mecanismos de uso corrente em mecânica, justifica que algumas das suas características específicas sejam estudadas com algum detalhe. Assim, considere-se o mecanismo de quatro barras ilustrado na figura 2.5, o qual de acordo com o critério de Grashof é um mecanismo do tipo dupla barra oscilante. Em geral, neste tipo de quadrilátero articulado a barra 2 é o órgão motor e a barra 4 o órgão movido. Os comprimentos das barras 1, 2, 3 e 4 são, respectivamente, r 1 , r 2 , r 3 e r 4 , como ilustra a figura 2.
6 CINEMÁTICA DE MECANISMOS
Da análise da equação (2.4) pode observar-se que o ângulo de transmissão é
comprimentos das barras, r 1 , r 2 , r 3 e r 4 , são valores conhecidos. Note-se que para
assumir duas configurações distintas. O ângulo de transmissão é mínimo quando a barra 2 está na posição AB’ , e máximo quando a barra 2 alcança a posição AB’’ , como se mostra na figura 2.7. Quando se pretende que um quadrilátero articulado transmita uma dada força ou momento, essa transmissão é tanto mais eficaz quanto mais próximo de 90º for o ângulo de transmissão durante o movimento. Assim, quando se projecta um mecanismo de quatro barras, o ângulo de transmissão deve, em geral, estar compreendido entre 90º±50º, isto é, 40º e 140º. Quando o ângulo de transmissão está fora deste intervalo, o mecanismo tende a bloquear, por um lado, devido ao atrito existente nas juntas cinemáticas e, por outro, porque as barras, intermédia e movida, tendem a ficar alinhadas uma com a outra. Dado que o ângulo de transmissão é fácil de obter, este parâmetro é comummente aceite como medida do desempenho de um mecanismo de quatro barras^2.
θ
2
3
4
(^1 )
B
A
C
D
γmáx
γmín
B’
B’’
C’ C’’
Figura 2.7 – Ângulo de transmissão mínimo e máximo.
Num quadrilátero articulado, o rácio entre a força (ou momento) da saída e força (ou momento) de entrada define a vantagem mecânica do mecanismo, isto é, VM = M 4 / M 2. A vantagem mecânica pode também ser definida como o inverso da razão entre a velocidade angular de entrada e a velocidade angular de saída, ou seja,
Na figura 2.8 estão representados os diagramas do corpo livre de cada uma das barras que constituem o mecanismo de quatro barras. Sendo a barra 2 o órgão motor, nela actua um momento motor M 2 , ao passo que na barra 4, órgão movido, é exercido um momento resistente M 4. Admitindo que a barra movida está em equilíbrio, desprezando os efeitos devido à inércia do sistema, é nulo o somatório dos momentos
(^2) Para mecanismos do tipo came-seguidor ou de engrenagens, o valor do ângulo de pressão é usado
como medida qualitativa do seu desempenho. Nestes casos o ângulo de transmissão é o ângulo medido entre a direcção da força transmitida e a direcção da velocidade do ponto onde essa força é aplicada.
2. ANÁLISE DESCRITIVA DE MECANISMOS 7
que actuam na barra 4 em relação ao ponto D. Matematicamente, esta condição de equilíbrio é traduzida por,
M (^) 4 − F 34 r 4 senγ = 0 (2.5)
em que F 34 representa a força que a barra 3 exerce sobre a barra 4. Resolvendo a equação (2.5) em ordem a F 34 vem que,
r senγ
4
4 34 =^ (2.6)
Da análise da equação (2.6) observa-se que para um dado momento resistente, M 4 ,
Do mesmo modo, para a barra 2 pode escrever-se, − M (^) 2 + F 32 r 2 senβ = 0 (2.7)
Atendendo a que a magnitude da força F 32 é igual à da força F 34 , a vantagem mecânica do mecanismo de quatro barras pode ser expressa por,
r senβ
rsenγ ω
ω M
2
4 4
2 2
2
3
B 4
A
C
D
β γ
1
D
1
B
C
A
F (^21) F (^41)
F 12
F (^32)
F 23
F (^43)
F (^34)
F (^14)
M 2
ω 2
M 4
ω 4
Figura 2.8 – Diagramas do corpo livre das barras do quadrilátero articulado.
No mecanismo de quatro barras, como em outros mecanismos, é possível que em determinadas fases do movimento duas das suas barras fiquem alinhadas uma com a outra. Quando assim acontece, e se o órgão motor for uma terceira barra, o
2. ANÁLISE DESCRITIVA DE MECANISMOS 9
B
A
C
B’ D C’
Figura 2.10 – Fase de ponto de mudança num quadrilátero articulado.
Quando o mecanismo se move da configuração ABCD para AB’C’D , tal que todas as barras se encontram colineares, o movimento é cinematicamente indeterminado. Assim, se, por exemplo, a roda dianteira se mover de tal modo que o ponto C ocupa a posição C’’ , a correspondente posição do ponto B da roda traseira pode ser a ilustrada na figura 2.11a, em que o mecanismo se mantém como paralelogramo, ou a configuração representada na figura 2.11b, sendo este mecanismo vulgarmente denominado de anti-paralelogramo ou contra-paralelogramo 4.
B
A
C
D B’’ C’’
B
A
C
D
B’’
C’’
(a) (b)
Figura 2.11 – (a) Paralelogramo; (b) Contra-paralelogramo.
Um modo de eliminar esta fase de ponto de mudança consegue-se acoplando volantes de inércia ou contrapesos. Esta solução é apenas válida para velocidades baixas devido aos desequilíbrios dinâmicos que os volantes produzem. Uma outra solução passa pelo acoplamento de uma segunda barra intermédia do outro lado da locomotiva e desfasada de 90º da primeira, de modo a que as fases de ponto de mudança não ocorram em simultâneo, como se mostra na figura 2.12. A experiência de projectistas e engenheiros diz que quando num mecanismo de accionamento de locomotivas uma das barras intermédias parte, a outra barra intermédia tem de ser desmontada antes que a locomotiva retome a marcha. Caso contrário podem ocorrer fases de ponto de mudança e, consequentemente, a própria barra ou um dos pinos podem partir. A ocorrência de fases de ponto morto não deve ser confundida com as fases de ponto de mudança, embora seja possível que as duas situações ocorram em simultâneo. É importante notar uma diferença fundamental entre estas duas fases de instabilidade. A ocorrência de pontos mortos depende da posição da barra motora e do modo como a força motriz é aplicada. Um ponto de mudança, por seu lado, é originado pela configuração geométrica do mecanismo e é independente de qual das barras é a fixa ou motora, uma vez que a cadeia cinemática é a sempre mesma, isto é, o movimento relativa entre as barras é o mesmo independentemente da barra fixa.
(^4) Reuleaux foi quem primeiramente utilizou o nome mecanismo de contra-paralelogramo. Há, ainda
autores que preferem a designação mecanismo de borboleta.
10 CINEMÁTICA DE MECANISMOS
Figura 2.12 – Quadrilátero articulado ou paralelogramo sem fase de ponto de mudança.
A figura 2.13 mostra um outro mecanismo de quatro barras em que também ocorrem fases de ponto de mudança durante o movimento. Este mecanismo de quatro barras é do tipo dupla manivela e apresenta ainda outras características específicas, ou seja, não tem fases de ponto morto, ambas as barras 2 e 4 são rotativas e qualquer uma das barras 2 e 4 pode ser motora ou movida.
2
3
4
1 1
Figura 2.13 – Mecanismo de quatro barras de dupla manivela.
Este mecanismo de quatro barras verifica a igualdade no critério de Grashof. Uma outra particularidade do mecanismo de quatro barras de dupla manivela prende-se com o facto de que para uma entrada (órgão motor) a velocidade constante não corresponder uma saída (órgão movido) a velocidade constante. No caso particular
12 CINEMÁTICA DE MECANISMOS
A máquina universal de desenhar, ilustrada na figura 2.15, usa dois conjuntos de quatro barras (quadriláteros articulados) é, ainda hoje, utilizada no traçado de linhas rectas paralelas e perpendiculares, uma vez que os quadriláteros articulados são constituídos por dois pares de barras paralelas duas a duas. Na figura 2.15 estão representadas duas posições distintas da máquina de desenhar, podendo, deste modo, observar-se o seu funcionamento e o paralelismo entre as barras. O primeiro quadrilátero ABCD está fixo à base através das juntas de rotação situadas em A e D , enquanto que o segundo quadrilátero EFGH , ligado ao primeiro através de um roda auxiliar, permite que a extremidade, que contém as réguas de desenhar, se mova horizontal e/ou verticalmente. As réguas estão solidárias e perpendiculares entre si e podem rodar em torno de P. Assim, utilizando réguas graduadas é possível traçar e medir distâncias lineares e angulares.
B C
A (^) D
H
E
P
F
G
Régua
Régua
Figura 2.15 – Máquina de desenhar.
O pantógrafo 6 é um outro dispositivo mecânico em que se utiliza um mecanismo de quatro barras. Este mecanismo, simples e engenhoso, foi inventado em 1603 pelo jesuíta Schreiner com o propósito de copiar^7 , ampliar e reduzir figuras planas. De facto, os pantógrafos são particularmente úteis quando se pretende reduzir ou ampliar desenhos cujas linhas são irregulares, como acontece frequentemente em desenhos topográficos. O pantógrafo também se utiliza em ourivesarias como dispositivo auxiliar na inscrição de alianças, anéis, medalhas entre outros objectos. O comando de máquinas-ferramenta com leitura óptica, como, por exemplo, o corte de chapa, pode ser feito com o recurso a um pantógrafo, sendo frequentemente usado um factor de ampliação de 10:1, entre o desenho e a peça executada.
(^6) Pantógrafo, pantos=tudo + graphein=escrever, é uma palavra de origem grega que traduz a ideia de
escrever/copiar tudo. (^7) A título de curiosidade referia-se que uma das maiores fraudes da História de Portugal foi levada a
cabo com o auxílio de um pantógrafo. Decorria o ano de 1928 quando o vigaro Alves dos Reis reproduziu mais de quinhentas mil notas de 500$00, cujo valor é aproximadamente 2,5€, iguais às que circulavam, copiando as assinaturas do governador e vice-governador do Banco de Portugal, com recurso a um pantógrafo.
2. ANÁLISE DESCRITIVA DE MECANISMOS 13
A figura 2.16 mostra uma configuração genérica de um pantógrafo em que a junta de rotação situada em P está fixa e é denominada pólo. O pantógrafo^8 é constituído por um conjunto de quatro barras que formam um paralelogramo. As barras estão ligadas entre si por juntas cinemáticas de rotação nos pontos P , B , C e D. No ponto E é colocado um estilete que permite seguir o desenho a reduzir, enquanto que no ponto L existe um lápis com o qual é traçado o desenho reduzido. Quando se pretende fazer uma ampliação em vez de uma redução, invertem-se as posições do estilete e do lápis. A posição relativa entre pontos C , D , E e L é tal que os pontos P , L e E se situam na mesma linha recta, como ilustra a figura 2.16.
A
B
C
D
E
P
A’
B’ C’
D’
E’
L’
L
Figura 2.16 – Representação esquemática de um pantógrafo.
A demonstração do funcionamento do pantógrafo pode ser levada a cabo admitindo, por exemplo, que o ponto E se desloca até alcançar a posição E’ , passando o pantógrafo a ocupar a posição representada a traço interrompido. Assim, enquanto que o movimento do estilete descreve o segmento EE’ , o correspondente segmento descrito pelo lápis é LL’. Da observação da figura 2.16 pode concluir-se que os triângulos PEB e PCL são semelhantes, e, deste modo, pode escrever-se que,
Uma vez que os triângulos PB’E’ e PC’L’ são também semelhantes resulta que,
Como as barras são perfeitamente rígidas, e uma vez que as posições relativas das juntas não varia durante o movimento, são válidas as seguintes relações,
BE = B'E ' (2.11) PC = PC ' (2.12)
(^8) Note-se que o pantógrafo não é, em rigor, um mecanismo de quatro barras mas sim de cinco barras.
2. ANÁLISE DESCRITIVA DE MECANISMOS 15
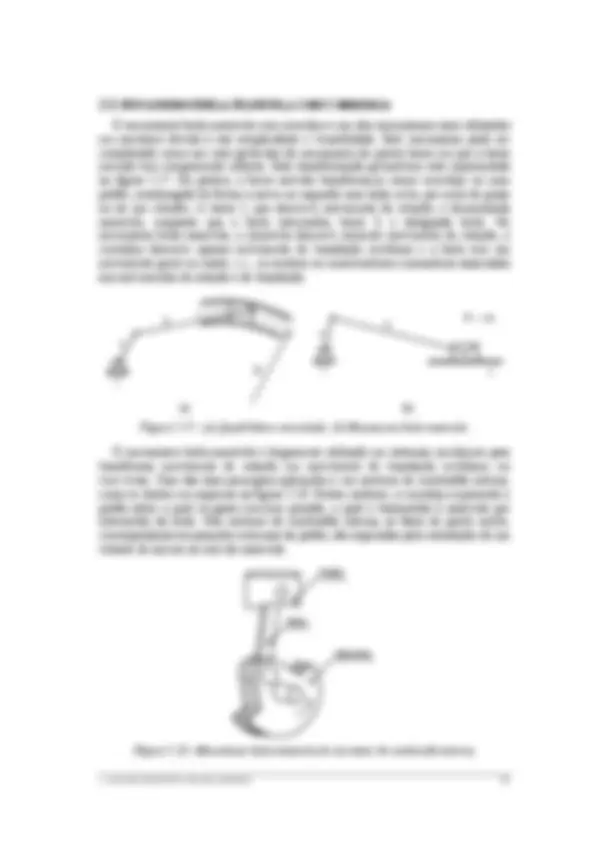
O mecanismo biela-manivela com corrediça é um dos mecanismos mais utilizados em mecânica devido à sua simplicidade e versatilidade. Este mecanismo pode ser considerado como um caso particular do mecanismo de quatro barra em que a barra movida tem comprimento infinito. Esta transformação geométrica está representada na figura 2.17. Na prática, a barra movida transforma-se numa corrediça ou num pistão, constrangida de forma a mover-se segundo uma linha recta, por meio de guias ou de um cilindro. A barra 2, que descreve movimento de rotação, é denominada manivela, enquanto que a barra intermédia, barra 3, é designada biela. No mecanismo biela-manivela, a manivela descreve somente movimento de rotação, a corrediça descreve apenas movimento de translação rectilínea e a biela tem um movimento geral ou misto, i.e. , co-existem as características cinemáticas associadas aos movimentos de rotação e de translação.
4
1
2
3
R 1
2
3
4
1
(a) (b)
R →
Figura 2.17 – (a) Quadrilátero articulado; (b) Mecanismo biela-manivela.
O mecanismo biela-manivela é largamente utilizado em sistemas mecânicos para transformar movimento de rotação em movimento de translação rectilínea, ou vice-versa. Uma das suas principais aplicações é em motores de combustão interna, como se ilustra em esquema na figura 2.18. Nestes motores, a corrediça representa o pistão sobre o qual os gases exercem pressão, a qual é transmitida à manivela por intermédio da biela. Nos motores de combustão interna, as fases de ponto morto, correspondentes às posições extremas do pistão, são superadas pela introdução de um volante de inércia no eixo da manivela.
Manivela
Biela
Pistão
Figura 2.18 – Mecanismo biela-manivela de um motor de combustão interna.
16 CINEMÁTICA DE MECANISMOS
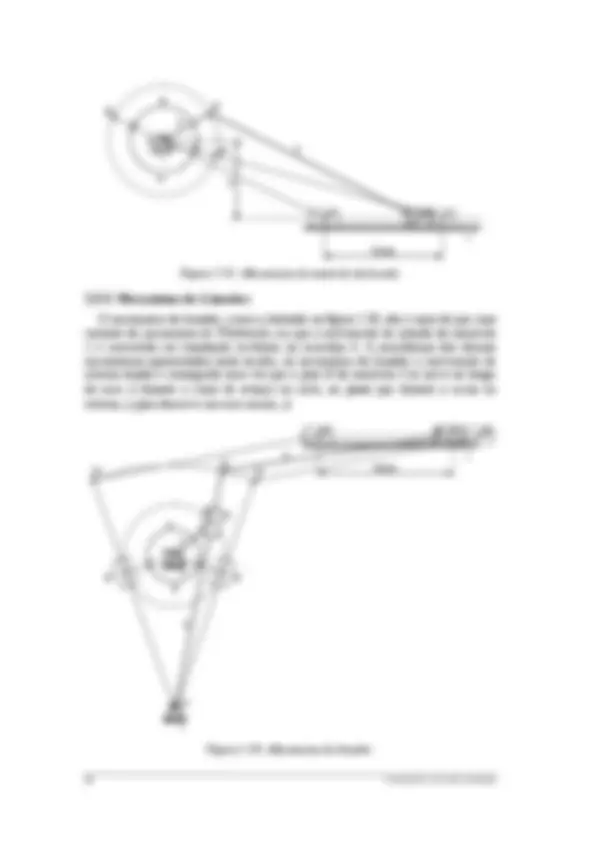
O mecanismo biela-manivela encontra ainda aplicação frequente em compressores de ar, onde a manivela é o órgão motor que recebe o movimento de rotação, por exemplo, de um motor eléctrico, sendo transformado em movimento alternativo de translação que comprime o ar. Deve notar-se que neste tipo de aplicação não existem fases de ponto morto. Contudo, as fases de ponto de mudança podem existir sempre que a biela e manivela tenham o mesmo comprimento. Uma vez que são quatro os corpos que compõem o mecanismo biela-manivela, há quatro possíveis inversões do mecanismo, como é ilustrado na figura 2.19. Na figura 2.19a está representado o mecanismo biela-manivela básico que existe nos motores de combustão interna. O corpo 4, o pistão, é o órgão motor que é accionado pela expansão dos gases de combustão, a barra 2 é o órgão movido e o fixe é o bloco ou cilindro. Tal como foi referido anteriormente, invertendo os papéis entre o órgão motor e movido, o mesmo mecanismo pode funcionar como compressor. Na figura 2.19b a manivela está fixa, ao passo que a barra 1, anteriormente fixa, pode rodar. Este tipo de mecanismo foi muito utilizado em motores de combustão interna nos primórdios da indústria aeroespacial, sendo conhecidos como motores rotativos porque os cilindros rodam em relação à manivela que está fixa. Uma outra inversão do mecanismo biela-manivela é a que mostra a figura 2.19c, em que biela é o corpo fixo. Este tipo de inversão teve aplicação como mecanismo de tracção nas locomotivas a vapor sendo o corpo 2 a roda. A inversão representada na figura 2.19d, em que a corrediça é o órgão fixo, corresponde ao mecanismo das bombas manuais utilizadas para retirar água de poços.
1
2 3
(a) (b)
1
2
3
4
1
2
1
3
(c) (d)
1
2 3 2
3
4
4
4
Figura 2.19 – Quatro possíveis inversões do mecanismo biela-manivela.
No mecanismo biela-manivela é comum relacionar a posição linear do pistão com a posição angular da manivela. Assim, atendendo à geometria da figura 2.20, pode escrever-se a seguinte expressão para a posição do pistão,
x (^) 4 = AC = AD + DC = rcosθ + lcos φ (2.15)