



Instituto Federal de Educação, Ciência e Tecnologia da Paraíba
MINICURSO
Microcontrolador PIC 16F877
Alison Lins de Lima
Fábio Montenegro Pontes
Jonathan B. da Silva
Rafael Tavares Coutinho
Thiago Pinto
João Pessoa, 23 de Maio de 2010














Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Apostila de microcontroladores
Tipologia: Notas de estudo
1 / 22

Esta página não é visível na pré-visualização
Não perca as partes importantes!
João Pessoa, 23 de Maio de 2010
Plano de Curso
**1. Evolução da Tecnologia e Surgimento dos microcontroladores;
2.1 - O que é um microcontrolador e onde se aplica;
2.2 - Diagrama de Blocos básico de um microcontrolador;
2.3 - Arquitetura e filosofia;
3. Memórias
3.1 - RAM
3.2 - ROM
**4. Tipos de PIC (quanto à memória de programa)
7.1 – Alimentação
7.2 – Circuitos Osciladores
8. Programação
8.1 – Assembler
8.2 - C
**9. Comandos Básicos
11.1 – acionando um led
11.2 – pisca – pisca com led e variando a frequência;
11.3 – Contador com Display de sete segmentos;
11.4 – Escrevendo em um LCD de 16x2;
11.5 – Usando um botão, para acionar um led;
**1. Evolução da Tecnologia e Surgimento dos microcontroladores;
2.1. O que é um microcontrolador e onde podemos encontrá-lo.
Def 1.: Podemos definir um microcontrolador com sendo um computador simplificado em um
único circuito integrado, utilizado no controle de processos lógicos. (Entende-se como
processo lógico o acionamento de leds, displays sete seguimentos, lcds, relés, sensores ...)
Def 2.: São circuitos integrados dotados internamente de um ULA (unidade lógica e
aritmética), uma unidade de controle e conjunto de periféricos (ex.: contadores,
temporizadores, portas I/O, memórias).
Aplicações:
Indústria Automobilística
i) Injeção Eletrônica; ii) Fechaduras Eletrônicas;
Empresas de Segurança
i) Alarmes; ii) Sensores de movimentação; iii) Cercas Elétricas;
Indústria de Telefonia
i) Celulares ii) Binas iii) Centrais Telefônicas
Robótica
i) Robôs para competição e de uso geral
Brinquedos
i) Bonecos ii) Aeromodelismo
Saúde
i) Equipamentos Médicos Hospitalares
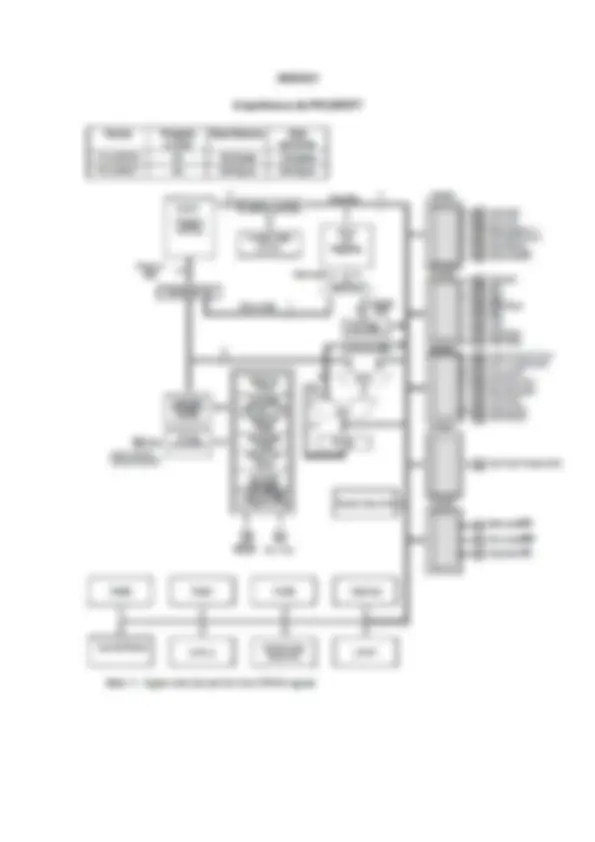
2.2. Diagrama de Blocos básico de um microcontrolador
2.3. Arquitetura e filosofia
Def .: São as partes que constitui o microcontrolador e como as mesmas estão interligadas.
Von – Neuman (CISC) - Primeiras arquiteturas pensadas para computadores.
Harvard (RISC)
HARVARD VON - NEUMAN
As arquiteturas se diferenciam pela ligação da CPU com as memórias de dados e a de
programa, na arquitetura de Harvard, a CPU esta conectada as memórias por barramentos
separados o que permite o uso do conjunto de instruções (RISC), já na arquitetura de Von –
Neumann, a CPU esta conectada as memórias pelo mesmo barramento, isso demanda o uso
de conjunto de instruções complexas (CISC).
Obs.: Arquitetura do PIC 16F877,
encontra-se nos anexos.
3. Memórias (VER ANEXO II)
3.1 – RAM
As memórias RAM são memória de uso
temporário, voláteis os dados só
permanecem na memória enquanto está
ligada, quando a memória é desligada
todos os dados são perdidos.
3.2 - ROM
São memória de gravação permanente,
mesmo quando estão desligadas os
dados permanecem guardados.
Principais Características das memórias
de programa e dados do PIC 16F877:
Memória de Programa (Flash)
8k x 14 bits
Memória de dados (Ram)
368 bytes
Memória de dados (EEprom)
256 bytes
5. PC e a Pilha
PC é um registrador que aponta para o endereço da próxima instrução a ser executada.
O PC tem 13bits, com isso pode endereçar 8k de memória.
❹❸➀^ 㐄 ➅❸➆❹ ↇ↖ↆↇ∀ↇç↗∁
OBS.: A partir do PIC 16f84 o PC já possuía 13 bits, mesmo tendo uma memória de dados de
1k x 14 bits.
A pilha é um registrador de oito níveis, no qual são guardados os endereços de retorno das
rotinas de interrupções.
endereço 3 endereço 2 endereço 1
“Quando acontece a primeira interrupção, o endereço armazenado em PC vai para o primeiro
nível da pilha, se por acaso acontece uma segunda interrupção então novamente o endereço
que esta dentro do PC ocupa o primeiro nível da pilha e o endereço que antes ocupava o
primeiro nível desce para o segundo, quando a interrupção 2 acaba, o endereço que esta no
primeiro nível, é posto novamente no PC, que retorna para a posição em que havia parado na
primeira interrupção, daí o endereço 1 volta para o primeiro nível da pilhar e daí por diante...”
6. Interrupções
É uma parada de emergência na execução de uma rotina, que ocorre por um fato interno ou
externo e resulta na chamada de uma sub-rotina que começa ser executada e quando esta
acaba o microcontrolador volta a executar a rotina principal.
7. Polarização do Pic16F
8. Programação
8.1 – Assembler
É uma linguagem de baixo nível ou linguagem de máquina.
Vantagem: Código com o menor tamanho que se pode escrever;
Desvantagem: Cada microcontrolador tem seu conjunto de instruções; ( Condição Péssima )
8.2 – C
É uma linguagem de alto nível mais fácil de aprender em relação ao assembler.
Vantagem: facilidade no aprendizado e portável para outros microcontroladores;
Desvantagem: código maior do que se o mesmo fosse programado em assembler.
9. Comandos Básicos de:
Entrada
Tratamento a BIT Tratamento a PORTA input (PIN_D0) input _D() input (PIN_D0) input _D()
Saída
Tratamento a BIT Tratamento a PORTA output_low(PIN_D0) output_D(valor) output_high(PIN_D0) output_D(valor)
Loop
for(i=0; i>0; i++) for( ; ; ) loop infinito while(condição) while(1) ou while(true) loop infinito do{ } while(codição) switch / case
Condicional
if (condição){ }else{}
Atraso
delay_ms(1000) atraso em milisegundos delay_us(1000) atraso em microsegundos
10. Estrutura Básica de um programa em C
#include <16f877.h> // inclusão da Biblioteca do microcontrolador #fuses HS,NOWDT,NOPUT,NOBROWNOUT,NOLVP // Palavras de configurações do microcontrolador #use delay(clock=20000000) // Valor do clock
void main (){ // Corpo principal do programa comando 1 // comando 2 // Comandos comando 3 // }
Contador com Display de sete segmentos versão 2
#include <16f877.h> #fuses HS,NOWDT,NOPROTECT,NOLVP #use delay(clock=16000000) byte const tabela[]={ 0b10111111, 0b10000110, 0b11011011, 0b11001111, 0b11100110, 0b11101101, 0b11111101, 0b10000111, 0b11111111, 0b }; Void main(){ int t=500,valor = 0; while(true){ valor ++; if(valor>9) valor = 0; output_b (tabela[valor]); // apresenta o valor delay_ms(t); } }
Escrevendo em um LCD de 16x2;
#include <16f877.h> #include <regs_16f87x.h> #fuses HS,NOWDT,NOPUT,NOBROWNOUT,NOPROTECT,NOLVP #use delay(clock=20000000) #include <bib_LCD_16x2_all.c> void main (){ ini_lcd_16x2(); while(true){ printf(exibe_lcd,"\f PET ENGENHARIA \n ELETRICA IFPB"); delay_ms(3000);
printf(exibe_lcd,"\f OFERECE \n O MELHOR CURSO"); delay_ms(3000);
printf(exibe_lcd,"\f DE \nMICROCONTROLADOR"); delay_ms(3000); } }
Usando um botão, para acionar um led;
#include <16f877.h> #fuses hs,nolvp,nobrownout,nowrt #use delay(clock=20000000) void main(){ while(true){ if(!input(pin_a0)) { // se a0 for pressionado acende o led output_high(pin_d0); } if(!input(pin_a1)){ // se a0 for pressionado desliga o led output_low(pin_d0); } } }
Usando um sensor para acionar um led;
O código é semelhante ao anterior, a mudança acontece apenas no hardware, ao invés de
usarmos um botão na entrada iremos utilizar um sensor.
Escrevendo uma variável no LCD. (variável inteira)
#include <16f877.h> #include <regs_16f87x.h> #fuses HS,NOWDT,NOPUT,NOBROWNOUT,NOPROTECT,NOLVP #use delay(clock=20000000) #include <bib_LCD_16x2_all.c> int valor; void main (){ ini_lcd_16x2(); valor = 0; while(true){ printf(exibe_lcd,"\f teste %d",valor); delay_ms(100); valor++; }
}
Obs.: os LEDs e as chaves são baixo ativos.
Modo Padrão (mais simples)
#include <16F871.H #fuses HS,NOWDT,PUT,NOBROWNOUT,NOLVP #use delay(clock=4000000)
void main (void){ for(;;){ //loop infinito if(!input(PIN_A4)) output_low(PIN_D0); else output_high(PIN_D0);
if(!input(PIN_C0)) output_low(PIN_D1); else output_high(PIN_D1);
if(!input(PIN_C1)) output_low(PIN_D2); else output_high(PIN_D2);
if(!input(PIN_B0)) output_low(PIN_D3); else output_high(PIN_D3);
if(!input(PIN_E2)) output_low(PIN_D4); else output_high(PIN_D4); } }
Modo Direto
#include <16F871.H> // arquivo de definições do microcontrolador usado #fuses HS,NOWDT,PUT,NOBROWNOUT,NOLVP // bits de configuração
#use delay(clock=4000000) // informa ao sistema o frequência de clock, para temporização
// Endereços dos portais #byte PORTA=0x #byte PORTB=0x #byte PORTC=0x #byte PORTD=0x #byte PORTE=0x
// Entradas #bit CH_TMR0 = PORTA. #bit CH_TMR1 = PORTC. #bit CH_0 = PORTC. #bit CH_INT = PORTB. #bit CH_1 = PORTE.
// Saídas #bit LED0 = PORTD. #bit LED1 = PORTD. #bit LED2 = PORTD. #bit LED3 = PORTD. #bit LED4 = PORTD.
void main (void) { set_tris_d(0xE0); // configuração direcional: os 5 LSbits do portal D são saídas
for(;;){ //loop infinito if(!CH_TMR0) LED0 = 0; else LED0 = 1;
if(!CH_TMR1) LED1 = false; else LED1 = true;
if(!CH_0) LED2 = false; else LED2 = true;
if(!CH_INT) LED3 = false; else LED3 = true;
if(!CH_1) LED4 = false; else LED4 = true; } }
Modo Fixo
#include <16F871.H> // arquivo de definições do microcontrolador usado #fuses HS,NOWDT,PUT,NOBROWNOUT,NOLVP // bits de configuração
#use fixed_io(d_outputs = PIN_D0,PIN_D1,PIN_D2,PIN_D3,PIN_D4) // saídas da porta D. Os demais são entradas
#use delay(clock=4000000) // informa ao sistema o frequência de clock, para temporização
// Entradas #DEFINE CH_TMR0 PIN_A #DEFINE CH_TMR1 PIN_C #DEFINE CH_0 PIN_C #DEFINE CH_INT PIN_B #DEFINE CH_1 PIN_E
(^2) RA0/AN (^3) RA1/AN (^4) RA2/AN2/VREF- (^6) RA4/T0CKI (^7) RA5/AN4/SS (^8) RE0/AN5/RD (^9) RE1/AN6/WR (^10) RE2/AN7/CS
(^13) OSC1/CLKIN (^14) OSC2/CLKOUT
RC1/T1OSI/CCP2 16 RC2/CCP1 17 RC3/SCK/SCL 18
RD0/PSP0 19 RD1/PSP1 20
RB7/PGD 40
RB6/PGC 39
RB5 38
RB4 37
RB3/PGM 36
RB2 35
RB1 34
RB0/INT 33
RD7/PSP7 30
RD6/PSP6 29
RD5/PSP5 28
RD4/PSP4 27
RD3/PSP3 22
RD2/PSP2 21
RC7/RX/DT 26
RC6/TX/CK 25
RC5/SDO 24
RC4/SDI/SDA 23
(^5) RA3/AN3/VREF+
RC0/T1OSO/T1CKI 15
(^1) MCLR/Vpp/THV
U
PIC16F
D
LED-RED
void main (void) { set_tris_d(0xE0); // configuração direcional: os 5 LSbits do portal D são saídas
for(;;){ if(!input(CH_TMR0)) output_low(LED0); else output_high(LED0);
if(!input(CH_TMR1)) output_low(LED1); else output_high(LED1);
if(!input(CH_0)) output_low(LED2); else output_high(LED2);
if(!input(CH_INT)) output_low(LED3); else output_high(LED3);
if(!input(CH_1)) output_low(LED4); else output_high(LED4); } } Controlando o brilho do LED com o Módulo PWM
#include<16F877a.h> #device adc= #fuses HS,NOWDT,NOLVP,NOBROWNOUT #use delay(clock=20000000)
void main (void){
long int ciclo = 0;
setup_timer_2 (T2_DIV_BY_1,0xff,1); // 4 khz setup_ccp1 (ccp_pwm); set_pwm1_duty (0); while(1){ //loop infinito for(ciclo = 0;ciclo<=500;ciclo+=10){ set_pwm1_duty(ciclo); delay_ms(70); } for(ciclo = 500;ciclo>=0;ciclo-=10){ set_pwm1_duty(ciclo); delay_ms(70); } } }