Baixe Eficiência Energética em Motores Elétricos Industriais e outras Manuais, Projetos, Pesquisas em PDF para Hidráulica, somente na Docsity!
E FICICIÊNCIA ENERGÉTICA INDUSTRIAL
MOTOR ELÉTRICO
Egomar Rodolfo Locatelli
3
PROGRAMA
DE
E
FICIENTIZAÇÃO
I^
NDUSTRIAL
Motor Elétrico
SUMÁRIO 1 INTRODUÇÃO 2 TIPOS DE MOTORES ELÉTRICOS 2.1 Motores acionados em corrente contínua 2.1.1 Características construtivas dos motores de corrente contínua 2.1.1.1 Indutor 2.1.1.2 Induzido ou armadura 2.1.2 Tipos de motores de corrente contínua 2.1.2.1 Motor de ímã permanente 2.1.2.2 Motor campo série 2.1.2.3 Motor Campo Paralelo (shunt) 2.1.2.4 Motor de Excitação Independente 2.1.2.5 Motor Composto (compound) 2.1.3 Vantagens dos motores de corrente contínua 2.1.4 Desvantagens dos motores de corrente contínua 2.2 Motor universal 2.2.1 Vantagens dos motores universais 2.2.2 Desvantagens dos motores universais 2.3 Motores acionados em corrente pulsante 2.3.1 Motor de Passo (step motor) 2.3.1.1 Aplicação de Motores de Passo 2.3.1.2 Vantagens dos Motores de Passo 2.3.1.3 Desvantagens dos motores de passo 2.4 Motores acionados em corrente alternada trifásica 2.5 Motores síncronos 2.5.1 Princípio de funcionamento 2.5.2 Característica de operação dos motores síncronos 2.5.3 Vantagens dos motores síncronos 2.5.4 Desvantagens dos motores síncronos 2.6 Motores de indução trifásicos rotor gaiola de esquilo 2.6.1 Componentes
4
PROGRAMA
DE
E
FICIENTIZAÇÃO
I^
NDUSTRIAL
Motor Elétrico
2.6.2 Princípio de funcionamento 2.7 Motores de indução trifásicos de rotor bobinado 2.8 Motor linear 2.9 Motores monofásicos 2.9.1 Generalidades 2.9.2 Princípio de funcionamento 2.9.3 Tipos de motores de indução monofásicos 2.9.3.1 Motor de fase dividida (split-phase) 2.9.3.2 Motor de capacitor de partida (capacitor-start) 2.9.3.3 Motor de capacitor permanente (permanent-split) 2.9.3.4 Motor com dois capacitores (two-value capacitor) 2.9.3.5 Motores de campo distorcido ou pólos fendidos (shaded-pole) 3 MOTOR DE INDUÇÃO TRIFÁSICO DE GAIOLA 3.1 Generalidades 3.2 Características básicas 3.3 Característica de partida 3.4 Principais grandezas elétricas e mecânica em condições de regime e partida 3.4.1 Comportamento em função da velocidade 3.4.1.1 Conjugado (torque) x velocidade (figura 3.3): 3.4.1.2 Potência x velocidade (figura3.4) 3.4.1.3 Corrente x velocidade 3.4.1.4 Fator de potência x velocidade 3.4.1.5 Rendimento x velocidade (figura 3.7) 3.4.2 Comportamento em função da carga 3.4.2.1 Velocidade x carga 3.4.2.2 Corrente x Carga 3.4.2.3 Fator de potência x carga 3.4.2.4 Rendimento x carga 3.4.3 Informações dos fabricantes
6
PROGRAMA
DE
E
FICIENTIZAÇÃO
I^
NDUSTRIAL
Motor Elétrico
4.28 Temperatura ambiente mínima admissível, quando diferente da especificada pela NBR 7094 4.29 Altitude para a qual o motor foi projetado, quando superior a 1000 m (ALT) 4.30 Sentido de rotação 4.31 Placa complementar 5 CARACTERÍSTICAS DO AMBIENTE 5.1 Condições ambientais normais 5.2 Condições ambientais especiais 5.3 Áreas classificadas 5.3.1 Generalidades 5.3.2 Critérios de classificação 5.3.3 Condições de temperatura 5.3.3.1 Temperatura ambiente 5.3.3.2 Temperatura máxima 5.3.4 Tipos de motores para utilização em áreas classificadas 5.3.4.1 Motor a prova de explosão (Ex-d) 5.3.4.2 Motores elétricos de segurança aumentada (Ex-e) 6 O MOTOR DE ALTO RENDIMENTO 6.1 Generalidades 6.2 Redução das perdas 6.3 Perdas nos núcleos 6.4 Perdas mecânicas 6.5 Perdas por efeito joule no estator 6.6 Perdas por efeito joule no rotor 6.7 Perdas suplementares 6.8 Benefícios do motor de alto rendimento 6.9 Desvantagens do motor de alto rendimento 6.10 O motor de alto rendimento segundo a NBR 7094/ 6.10.1 Linha padrão (subseção 13.1.1) 6.10.2 Linha de alto rendimento (subseção 13.1.2)
7
PROGRAMA
DE
E
FICIENTIZAÇÃO
I^
NDUSTRIAL
Motor Elétrico
7 NORMAS E ENSAIOS DE MOTORES ELÉTRICOS DE INDUÇÃO
7.1 Normalização 7.2 Normas ABNT para os motores de indução trifásicos de gaiola 7.3 Ensaios em motores de indução trifásicos de gaiola 7.3.1 Ensaios de rotina 7.3.2 Ensaios de tipo 7.3.3 Ensaios especiais 7.3.4 Ensaios de laboratório 7.3.5 Determinação do rendimento 7.3.6 Ensaios de campo 8 O USO EFICIENTE DO MOTOR ELÉTRICO NA INDÚSTRIA 8.1 Generalidades 8.2 Perdas internas 8.2.1 Perdas fixas 8.2.1.1 Perdas nos núcleos ( perdas no ferro ) 8.2.1.2 Perdas mecânicas (ventilação e atrito) 8.2.2 Perdas variáveis com a carga 8.2.2.1 Perdas no circuito elétrico do estator (perdas no cobre) 8.2.2.2 Perdas no circuito elétrico do rotor 8.2.3 Perdas suplementares 8.3 Rendimento 8.4 Superdimensionamento dos motores 8.5 Fator de potência 8.6 Rede de alimentação 8.6.1 Variação da tensão de alimentação 8.6.2 Desequilibro de tensões de fase 8.6.3 Freqüência de alimentação 8.6.4 Harmônicos
1
PROGRAMA
DE
E
FICIENTIZAÇÃO
I^
NDUSTRIAL
Motor Elétrico
1 INTRODUÇÃO
Na história da evolução da humanidade, observamos que o homem,
utilizando-se do dom da inteligência, procurou meios de saciar
suas necessidades de forma a utilizar o menor esforço possível.
Assim, nos primórdios foram desenvolvidos instrumentos para caça
e defesa, posteriormente foram desenvolvidas ferramentas para o
plantio e a utilização da força animal em substituição de sua própria
força física. Os inventos da máquina a vapor e do motor a explosão
proporcionaram a revolução industrial e dos meios de transporte.
A descoberta da eletricidade e do motor elétrico foi responsável pela
verdadeira revolução não só na indústria como em todas as áreas de
serviços e lazer. Hoje o homem se serve do motor elétrico no seu
cotidiano, tanto diretamente em aparelhos utilitários como geladeiras,
máquinas de lavar, liquidificadores, elevadores etc., quanto indiretamente,
através de produtos industrializados como remédios, vestuários, alimentos
etc. Até mesmo este produto, que no momento você está lendo, foi
concretizado com a participação de inúmeros motores: na fabricação do
papel, na impressão e encadernação do texto e assim por diante.
Assim, hoje, em grande parte das aplicações, o trabalho braçal foi
substituído pela força motriz proporcionada pelos motores elétricos.
No entanto, para poder funcionar, o motor elétrico necessita da energia
elétrica. A energia elétrica é sem dúvida a forma mais importante de energia
de que hoje a humanidade dispõe, devido à sua extrema utilidade e pelas
grandes facilidades que apresenta em relação às outras formas de energia,
tais como a sua geração, transporte, controle, distribuição e utilização.
O motor elétrico é um equipamento que transforma a energia da forma
elétrica para a forma mecânica. Ele é simplesmente um elemento de
transferência entre a rede elétrica e o sistema mecânico acionado. O
motor elétrico é o principal uso final da energia elétrica.
2
PROGRAMA
DE
E
FICIENTIZAÇÃO
I^
NDUSTRIAL
Motor Elétrico
4
PROGRAMA
DE
E
FICIENTIZAÇÃO
I^
NDUSTRIAL
Motor Elétrico
envolvidos tende a expulsar o condutor perpendicularmente às linhas
de campo (figura 2.2), é dada pela fórmula:
onde:
F = Força no condutor [N];
B= Densidade de fluxo do campo [tesla];
ι = Comprimento do condutor no campo magnético [m];
I = Corrente no condutor [A].
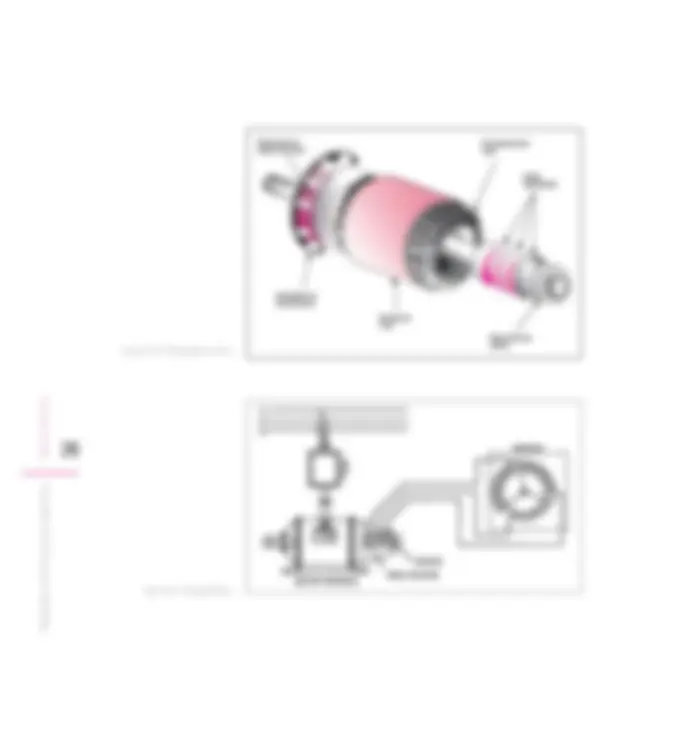
2 .1.1 Características construtivas dos motores de corrente contínua
Os motores de corrente contínua são constituídos por uma parte fixa
(estator) denominada indutor , e uma parte móvel (rotor) denominada
induzido ou armadura. Para levar a corrente aos enrolamentos do
rotor temos as escovas e o comutador.
Figura 2.2 - Força sobre condutor percorrido por corrente elétrica e imerso em um campo magnético.
5
PROGRAMA
DE
E
FICIENTIZAÇÃO
I^
NDUSTRIAL
Motor Elétrico
2.1.1.1 Indutor
Tem como finalidade produzir o campo magnético. A carcaça (estator)
faz parte do circuito magnético. Este campo tanto pode ser produzido
por um ímã permanente como por um eletroímã, sendo que, estes
últimos podem produzir campos magnéticos reguláveis.
O indutor é constituído por (figura 2.3):
» carcaça: serve como suporte para as demais partes e
providencia uma faixa de retorno do fluxo para o circuito
magnético criado pelo enrolamento de campo;
» enrolamento de campo: construído de umas poucas espiras
de fio grosso para motores campo série com resistência da
ordem de décimos de ohms, ou muitas espiras de fio fino para
o motor campo paralelo (shunt) com resistência de centenas
de ohms; essencialmente são eletroímãs, cujos ampères
espiras proporcionam uma força magneto-motriz (f.m.m)
adequada à produção do fluxo no entreferro, necessário para
gerar a força mecânica;
» pólos: os pólos são constituídos de ferro maciço, ou
através de pacote de lâminas aparafusados ao estator,
e as bobinas são colocadas nas peças polares de forma
circular, sendo estas enroladas de forma a terem
polaridades opostas;
» interpolo: para motores de maior porte são utilizados pólos
adicionais localizados entre os pólos principais, com objetivo
de reduzir o efeito de distorção de fluxo denominado reação
da armadura; são geralmente de tamanho menor e compostos
de algumas poucas espiras de fio grosso, ligados em série com
o circuito da armadura, de modo que a f.m.m produzida seja
proporcional à corrente na mesma;
7
PROGRAMA
DE
E
FICIENTIZAÇÃO
I^
NDUSTRIAL
Motor Elétrico
sua periferia para colocação do enrolamento da armadura;
» enrolamento da armadura: constituído de bobinas, isoladas
entre si e do núcleo da armadura, inseridas nas ranhuras e
eletricamente ligadas ao comutador;
» comutador: elemento formado por um conjunto de lâminas
de cobre que são dispostas lado a lado isoladas entre si por
meio de folhas de mica. Essas lâminas, depois de apertadas
formam a superfície lateral de um cilindro, ficando solidárias
com o eixo. O comutador, devido à rotação do eixo, providencia
o necessário chaveamento no processo de comutação;
» escovas: fazem parte do circuito da armadura e têm
a finalidade de levar a corrente de excitação à mesma,
através do deslizamento sobre os segmentos do comutador.
Normalmente são peças com o formato de um paralelepípedo,
sendo fabricadas em ligas de carvão, grafite e cobre conforme
aplicação. O grafite tem a propriedade lubrificante, para
reduzir o atrito com o comutador.
Figura 2.4 - Motor c.c. em corte.
8
PROGRAMA
DE
E
FICIENTIZAÇÃO
I^
NDUSTRIAL
Motor Elétrico
2.1.1 Tipos de motores de corrente contínua 2.1.1.1 Motor de ímã permanente
Os motores de imã permanente se caracterizam por possuir um imã fixo
no estator, e um rotor bobinado alimentado em corrente contínua através
de um conjunto escova-comutador. O comutador tem a finalidade de
manter a corrente fluindo no rotor sempre no mesmo sentido, produzido
assim, força ou conjugado motriz sempre no mesmo sentido.
Os motores de imã permanente são normalmente de pequena potência,
porém de grande volume de aplicação na indústria de brinquedos e na
indústria automotiva, e em algumas aplicações industriais.
Tem como vantagem a facilidade da variação da velocidade, pela
simples variação da tensão em seus terminais.
Outra vantagem é que, aplicando-se rotação ao seu eixo, tornam-se
geradores de corrente contínua com tensão diretamente proporcional
à velocidade, podendo assim também serem utilizados como
tacômetros de baixo custo.
Como desvantagem, têm geralmente uma baixa vida útil devido ao
atrito e faiscamento no conjunto escova-comutador, podendo produzir
ruídos eletromagnéticos de interferência em circuitos eletrônicos.
2 .1.1.2 Motor campo série
Este tipo de motor (figura 2.5) tem a bobina do indutor ligada em série
com o induzido, assim, a corrente que circula por ambos é a mesma.
Por este motivo, as bobinas indutoras são constituídas por fio grosso e
com poucas espiras, o que faz com este motor seja bastante robusto.
10
PROGRAMA
DE
E
FICIENTIZAÇÃO
I^
NDUSTRIAL
Motor Elétrico
2.1.1.3 Motor Campo Paralelo ( shunt )
Nos motores de corrente contínua de campo em paralelo, a mesma
tensão é aplicada no estator e rotor (figura 2.7), o que produz uma
característica de velocidade constante independente da carga.
Normalmente é utilizado para acionar equipamentos em que o
arranque não seja a plena carga e em que se necessite de uma
velocidade quase constante como é o caso de máquinas de ferramentas
(tornos e retíficas de precisão).
Através de um reostato de campo podemos variar a faixa de rotação
dentro de certos limites como pode ser visto na figura 2.8.
Figura 2.7 - Campo Paralelo – Bobina do indutor e do induzido ligadas em paralelo. Figura 2.8 - Curva característica motor campo shunt.
11
PROGRAMA
DE
E
FICIENTIZAÇÃO
I^
NDUSTRIAL
Motor Elétrico
2.1.1.4 Motor de Excitação Independente
No motor de excitação independente, os enrolamentos do indutor
e do induzido formam circuitos elétricos separados com tensões
de alimentação distintas. Apesar disso, este tipo de motor também
apresenta uma característica de velocidade constante para qualquer
valor de carga.
Tem a vantagem de se poder inverter o sentido de rotação invertendo-
se a polaridade de uma das fontes de alimentação. Assim, seu uso é
indicado em aplicações onde se necessite variar freqüentemente o
sentido de rotação, mantendo uma velocidade constante, por exemplo,
em antenas parabólicas dos radares.
2.1.1.5 Motor Composto ( compound )
No motor composto existem dois tipos de campos de excitação, um
campo em série e um campo em paralelo, podendo estes enrolamentos
ser ligados em derivação longa (adicional) ou curta (diferencial).
» Motor composto adicional
Possui características semelhantes ao do motor série, com a vantagem
de um conjugado de arranque maior e de nunca disparar em vazio.
» Motor composto diferencial
Possui características semelhantes ao do motor paralelo (shunt),
porém apresenta uma velocidade mais constante e um conjugado de
arranque menor.
A tabela 2.1 resume as características dos diferentes tipos de motores
de corrente contínua.