


ENGENHARIA DE COMPUTAÇÃO
ENGENHARIA DE CONTROLE E AUTOMAÇÃO
Controle Digital de Sistemas Dinâmicos
Base: Apostila Análise e Controle de
Sistemas Lineares
Prof. Valdemir Carrara
Universidade Braz Cubas
Conceitos Fundamentais











Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
CONCEITOS FUNDAMENTAIS
Tipologia: Notas de estudo
1 / 19

Esta página não é visível na pré-visualização
Não perca as partes importantes!
Base: Apostila Análise e Controle de Sistemas Lineares Prof. Valdemir Carrara Universidade Braz Cubas
Conceitos Fundamentais I
Conceitos Fundamentais I
Conceitos Fundamentais I
Conceitos Fundamentais I
Conceitos Fundamentais I
Conceitos Fundamentais I
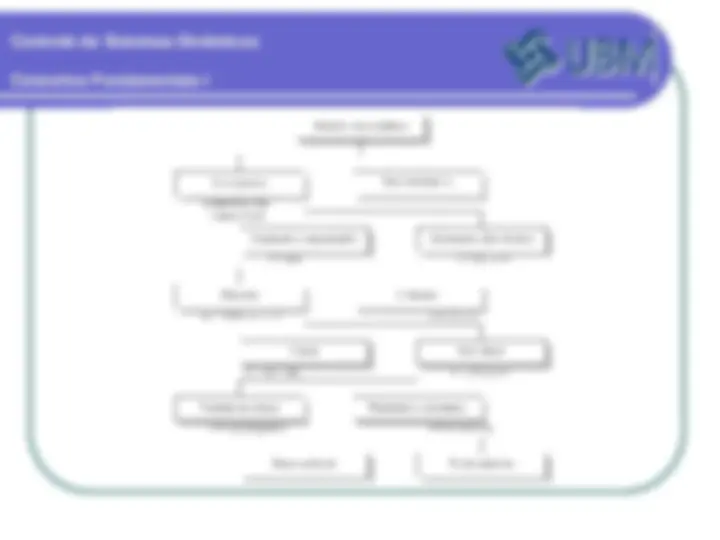
Conceitos Fundamentais I (^) O diagrama mostrado ilustra os diferentes tipos de sistemas e os modelos matemáticos utilizados na sua representação. (^) Sistemas determinísticos , ao contrário, possuem uma dinâmica previsível que pode ser modelada matematicamente. Se o sistema for determinístico, ele pode ser modelado por parâmetros concentrados ou distribuídos. (^) Sistemas dinâmicos estocásticos possuem um comportamento imprevisível, e devem ser modelados utilizando métodos probabilísticos.
Conceitos Fundamentais I (^) Parâmetros concentrados , ele poderá ser modelado por: (^) funções contínuas; (^) ou funções discretas no tempo. (^) Sistemas discretos são aqueles que assumem valores apenas em determinados instantes de tempo. Eles podem, eventualmente, ser modelados por funções contínuas. (^) A propriedade discreta pode tanto estar no próprio sistema quanto na forma de se medir o sistema. Se a medição for discreta, a intervalos regulares no tempo, este sistema é considerado discreto. (^) Exemplos de sistema discretos são: o número de habitantes contaminados a cada ano pelo vírus da gripe, a temperatura máxima do dia observada durante um ano num dado local, etc.
Conceitos Fundamentais I (^) Parâmetros concentrados , ele poderá ser modelado por: (^) funções contínuas; (^) ou funções discretas no tempo. (^) Se um sistema dinâmico contínuo for simulado num computador, ele passa a ser discreto , uma vez que é impossível obter o valor do estado a cada instante de tempo, mas somente nos pontos calculados pelo computador. (^) Na prática, porém, considera-se que o cálculo efetuado pelo computador é preciso o suficiente para que o sistema possa ser admitido como contínuo.
Conceitos Fundamentais I (^) Os sistemas podem ainda depender de apenas uma ou de mais de uma variável de estado. No primeiro caso tem-se os sistemas monovariáveis e no segundo tem-se sistemas multivariáveis. (^) A figura da massa mola mostra um exemplo de sistema monovariável. (^) Porém, o conjunto completo de suspensão de um veículo seria um sistema multivariável, já que dependeria do número de rodas presentes no veículo (^) Para cada roda, acrescenta-se uma equação a mais no modelo matemático e, portanto, mais uma variável de estado.
Conceitos Fundamentais I (^) Serão utilizados no curso apenas modelos matemáticos, uma vez que eles permitem efetuar a análise do comportamento dinâmico dos sistemas, bem como sua controlabilidade, isto é, a verificação se estes sistemas podem ou não ser controlados e como deve ser este controle. (^) Serão abordados sistemas lineares na quase totalidade do curso, principalmente, em virtude de que a teoria de controle moderna deriva exclusivamente de sistemas lineares.
Conceitos Fundamentais I (^) Nem todos os sistemas físicos reais são lineares. A grande maioria deles é não linear até um certo grau. (^) Não significa que a teoria de controle de sistemas lineares não possa ser aplicada a sistemas não lineares, mas sim que se deve proceder a uma linearização (quando possível) do sistema a fim de tornar o controle menos suscetível às não linearidades. (^) Nem sempre esta prática resulta num sistema controlável.