Pré-visualização parcial do texto
Baixe Visão Computacional em Octave e outras Slides em PDF para Engenharia de Telecomunicações, somente na Docsity!
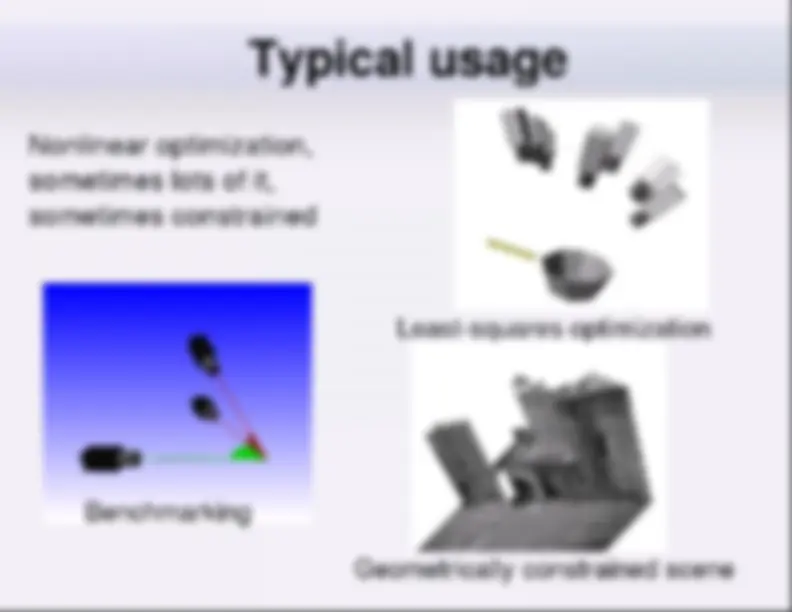
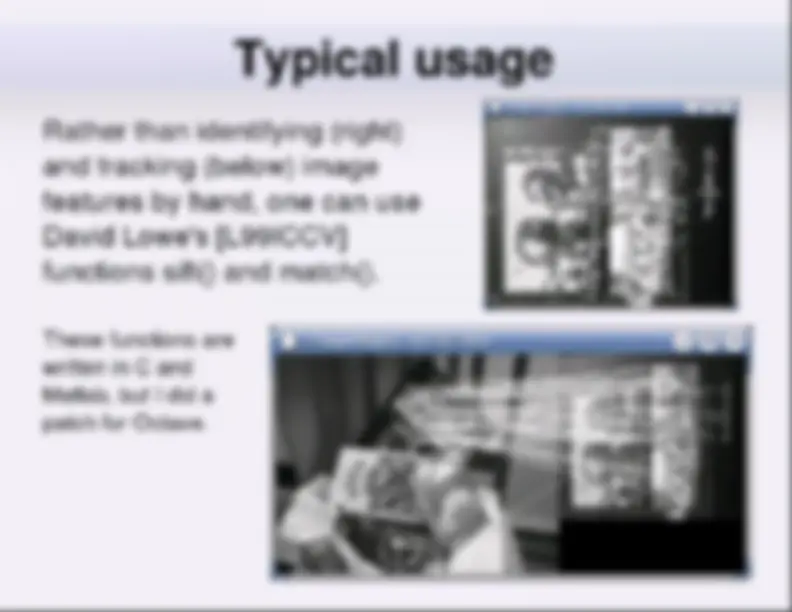
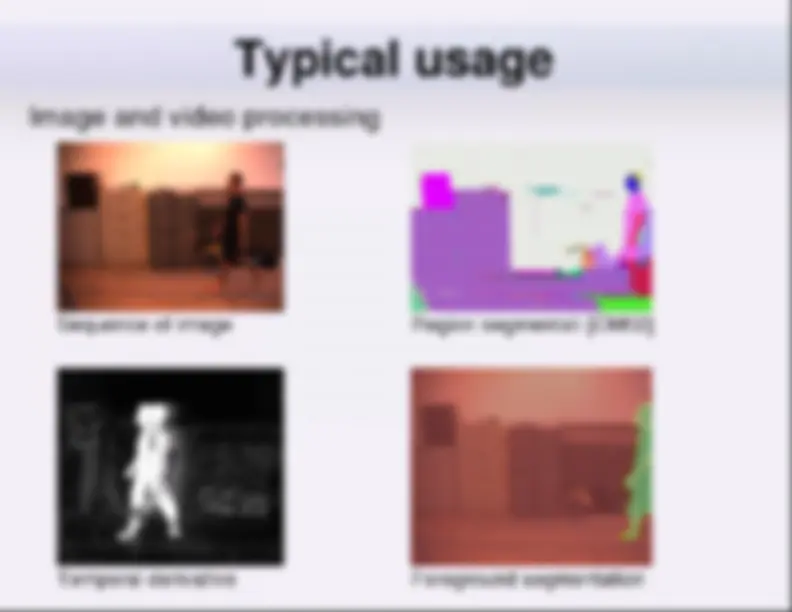
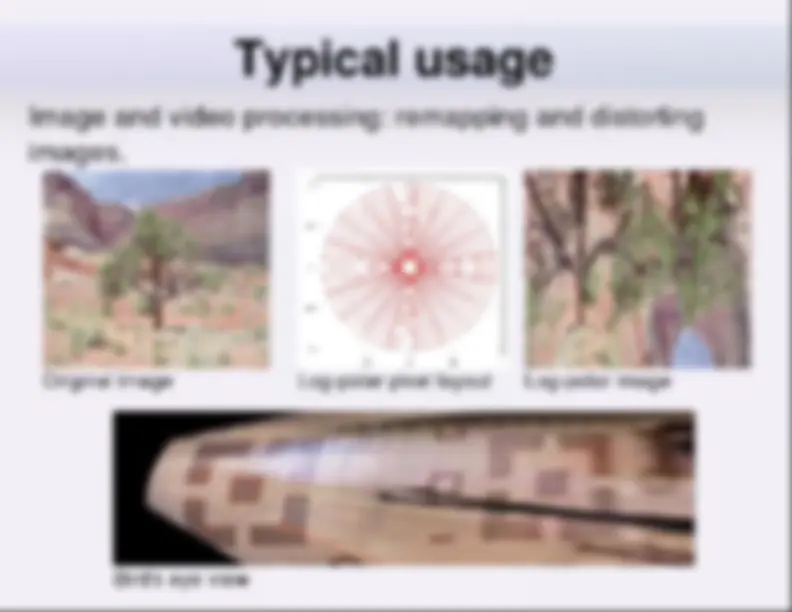
Octave in Computer Vision Etienne Grossmann visiting at U. of Montreal etienne(Disr.ist.utl.pt www.isr.ist.utl.pt/-etienne updated Octave Meeting ) À f presentation, 2006 /04 /23 a “e DOORS 1 É R Decision trees My je) 2 Face Detection 3D reconstruction Typical usage Vu dd as on possible Paraperspective object projection : SVD-based 3D reconstruction. Perspective projection linear operations Projected Possible points object Optical center e More in detail Perhaps the most Projected Fpssible basic operationin Points object 3D vision is N "projecting" a 3D optical E A point (on objects, + o at right) to an 3. image plane. 2. Other possible OQ. object > O Perspective projection is computed by 3x3 matrix multiplications and additions of 3x1 vectors. Octave/Matlab syntax is ideal for this. More in detail Technically, Projected Possible this image is a poiits N ee e: snapshot op TG Ica e tro VM MLp browser A [ FreeWRL and fe Other possible later annotated ES object with XFig. % The VRML file was produced by Octave, using octave-forge's vrml lines, vrml faces and vrml poinis functions. More in detail When geometric properties of the scene -some planarities, parallelisms, orthogonalities, symmetries- are known, they can be used to obtain a 3D reconstruction (sometimes) from a single view. The reconstruction is also more accurate. This reconstruction was obtained first by a non-iterative (but non-optimal) direct method and then refined by a solving with Levenberg-Marquardt a constrained least-squares problem. For better appeal, the texture from the original image is added with the vrml surf() function. Typical usage Rather than identifying (right) ae and tracking (below) image features by hand, one can use David Lowe's [L99ICCV] functions sift() and match(). These functions are EGEELEEREISN E (E written in C and | Matlab, but | did a patch for Octave. Typical usage Image and video processing: remapping and distorting images. 4 48 a as 1 Log-polar pixel layout Bird's eye view Typical usage Machine learning Decision trees Adaboost/cascades Input Cs A ak [Hs ELES Classiflers : o lo lo q lo lula / Waighis h What a language should provide * Matrix calculator / shell * Fast prototyping / unobtrusive language. * Reliability (unen there's a bug, it's in my code, not in Octave) * Scripted and interactive image manipulation * 3D visualization * Number crunching Options: Maple, C/C++, SplusiOctave/Matlal Perl Data Language, Numpy; Scitãb Why I chose Octave ... ... when our Matlab license expired. My choice boiled down to Scilab and Octave. | chose Octave because it had, in 1998: * variable argument / return list * keyboard * eval(), system() functions * Good licence * Active development / mailing lists References [CM] D. Comaniciu and P. Meer Mean Shift: A robust approach towards feature space analysis, IEEE Pattern Analysis and Machine Intelligence (PAMI), v.24, n.5, pp.603-619, 2002. [G04] E. Grossmann. AdaTree : boosting a weak classifier into a decision tree. Proc. CVPR workshop on learning in computer vision and pattemn recognition, 2004. [GSVOOICPR] E. Grossmann and J. Santos-Vietor, A closed-form Solution for Paraperspective Reconstrucitio, proc. Intl. Conference on Pattern Recognition, v.1, pp.864-867, 2000. [L99ICCV] D. G. Lowe, "Object recognition from local scale-invariant features,” Intl. Conf. on Computer Vision, pp. 1150-1157, 1999. http:/Avmww.cs.ubc.ca/-lowe/keypoints/. Octave patch at http:/Awww.cs.uky .edu/-etiegnne/code/code.html [PK97] C. J. Poelman and T. Kanade, A paraperspective factorization method for shape and motion recovery IEEE PAMI, v.19, n.3,pp.206-218, 1997. [SS] Schapire & Singer Improved boosting algorithms using confidence-rated predictions, Machine Learning, 1999. [VJ0o1] P. Viola and M. Jones, Robust Real-time Object Detection, proc. ICCV workshop on statistical and computational theories of vision.