Download Feed Forward Control-Process Control-Lecture Slides and more Slides Process Control in PDF only on Docsity!
CHAPTER 15: FEEDFORWARD CONTROL
When I complete this chapter, I want to be
able to do the following.
Identify situations for which feedforwardis a good control enhancement
Design feedforward control using the fivedesign rules
Apply the feedforward principle to otherchallenges in life
Outline of the lesson.
A process challenge - improveperformance
Feedforward design rules
Good features and applicationguidelines
Several process examples
Analogy to management principle
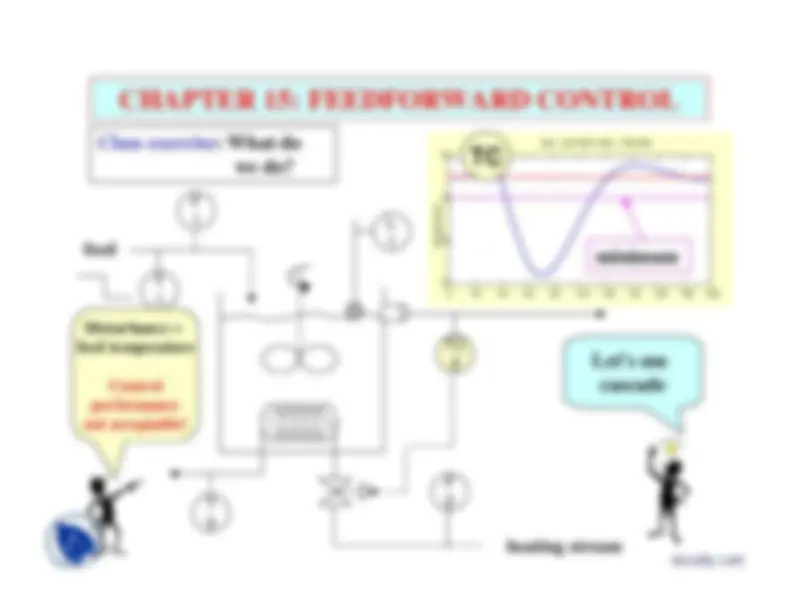
CHAPTER 15: FEEDFORWARD CONTROL
TC
2
T
1
F
1
F 2
T 3
L 1
feed
heating stream
Disturbance =
feed temperature
Control
performance
not acceptable!
Class exercise: What do
we do?
CHAPTER 15: FEEDFORWARD CONTROL
0
20
40
60
80
100
120
140
160
180
200
76 74 72 70
IAE = 237.6971 ISE = 758.
temperature
minimum
TC
Let’s use
cascade
docsity.com
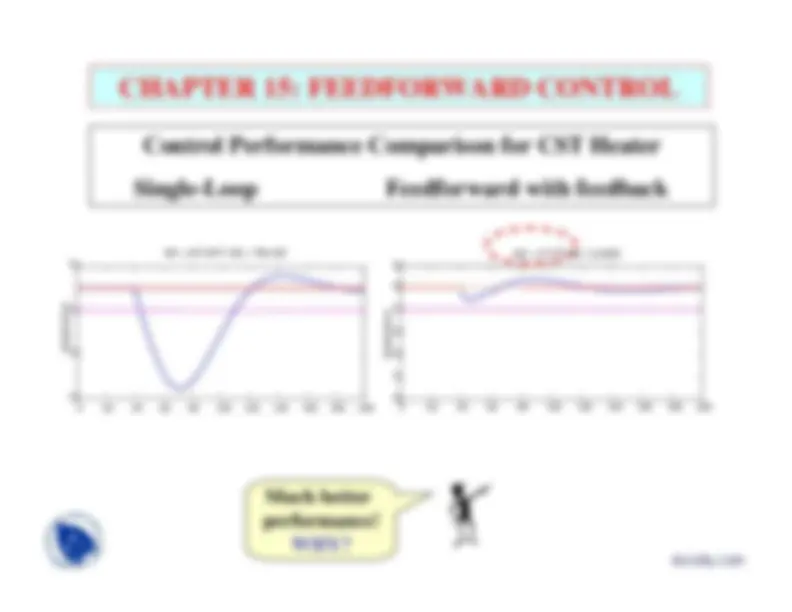
CHAPTER 15: FEEDFORWARD CONTROL
CASCADE DESIGN CRITERIA FOR T
Cascade is desired when1.
Single-loop performance unacceptable
A measured variable is available
A secondary variable must3.
Indicate the occurrence of an important disturbance
Have a causal relationship from valve to secondary
Have a faster response than the primary
OK OK OK
NO!
Cascade not possible. We need another enhancement!
0
20
40
60
80
100
120
140
160
180
200
76 74 72 70 68 66
T
0
20
40
60
80
100
120
140
160
180
200
Time
T
0
Time
D
m
(t) = T
0
CV
B
(t) = compensation effect
CHAPTER 15: FEEDFORWARD CONTROL
We want to
adjust the
valve to
cancel the
effect of the
disturbance.
CV
A
(t) = disturbance effect
CV
A
B
= no deviation
0
20
40
60
80
100
120
140
160
180
200
60 585654 52 50
v
MV(t) = v
CHAPTER 15: FEEDFORWARD CONTROL
We use block diagram algebra to determine the form ofthe calculation [G
ff
(s)] to achieve the desired performance.
G
d
(s)
G
p
(s)
G
ff
(s)
D
m
(s)
CV
A
(s)
CV
B
(s)
CV
(s)
MV
(s)
Measured disturbance, T
0
Manipulated variable
Controlledvariable, T How do we
measure CV
A
?
Feedforward
controller
docsity.com
CHAPTER 15: FEEDFORWARD CONTROL
)
(
)
(
)
(
)
(
)
(
s
G
s
G
s
D
s
MV
s
G
p
d
m
ff
−
=
=
s
ld lg
ff
m
ff
ff
e
s
T
s T K ) s ( D
s
MV
s
G
θ
−
Dead time
Gain
Lead-lag
Special case of G
p
(s) and
G
d
(s) being first order
with dead time
Please
verify.
CHAPTER 15: FEEDFORWARD CONTROL
s
ld
ff
ff
ff
e
s
T
s
T
K
s
G
θ
−
=
)
(
lg
1
1
Lead-lag
= (T
ld
s+1)/T
lg
s+1)
FF controller gain
= K
ff
= - K
d
/K
p
controller dead time
θ θ
θ θ
ff
θθθθ
d
θθθθ
p
Lead time
= T
ld
τ τ
τ τ
p
Lag time
= T
lg
τ τ
τ τ
d
How do we get values for these parameters?
CHAPTER 15: FEEDFORWARD CONTROL
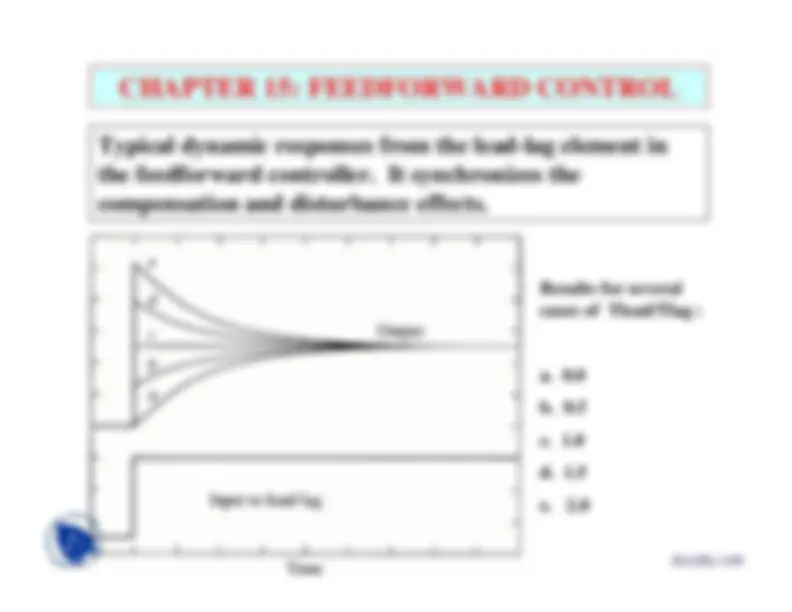
Typical dynamic responses from the lead-lag element inthe feedforward controller. It synchronizes thecompensation and disturbance effects.
Results for severalcases of Tlead/Tlag :a. 0.0b. 0.5c. 1.0d. 1.5e.
CHAPTER 15: FEEDFORWARD CONTROL
TC
2
T 1
F 1
F
2
T 3
L 1
feed
heating stream
TY
1
TY
2
FF
FF high-
lighted
in red
How do we combine
feedback with
feedforward?
MV
ff
MV
fb
0
20
40
60
80
100
120
140
160
180
200
74.8 74.6 74.
75
75.4 75.
IAE = 27.772 ISE = 8.
temperature
0
20
40
60
80
100
120
140
160
180
200
60 58 56 54 52 50
SAM = 11.4394 SSM = 774.
Time
heating valve (% open)
CHAPTER 15: FEEDFORWARD CONTROL
TC
The MV changed before T
deviated from its set point!
Disturbance occurred at this time
Valve adjustment not too aggressive
T
Why wait after disturbance?
CHAPTER 15: FEEDFORWARD CONTROL
What have we gainedand lost usingfeedforward andfeedback?How does the systemrespond to thefollowing?
A disturbance in feed inlet temperature
A disturbance in heating medium inlet pressure
A disturbance in feed flow rate
A change to the TC set point
TC
2
T
1
F 1
F
2
T 3
L 1
feed
heating stream
TY
1
TY
2
FF
CHAPTER 15: FEEDFORWARD CONTROL
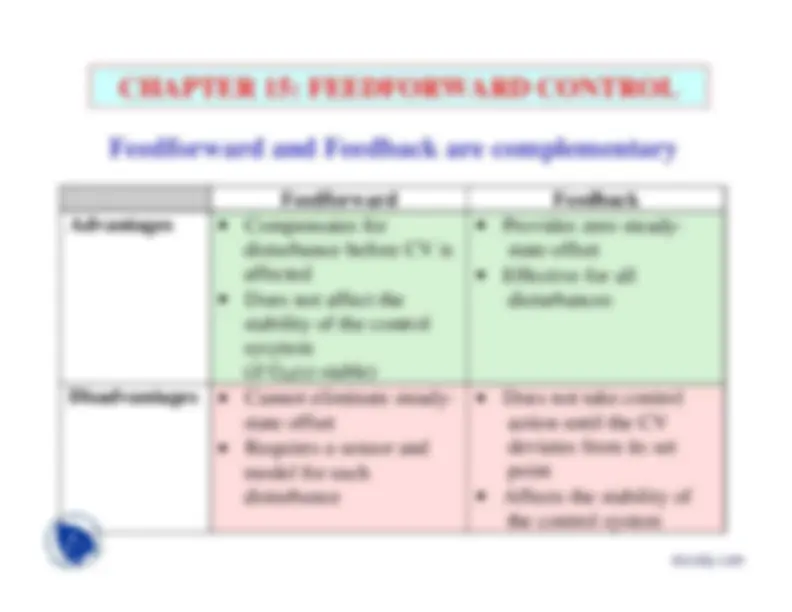
Feedforward
Feedback
Advantages
Compensates for disturbance before CV isaffected
Does not affect the stability of the controlsysytem(if G
ff
(s) stable)
Provides zero steady-
state offset
Effective for all
disturbances
Disadvantages
Cannot eliminate steady- state offset
Requires a sensor and model for eachdisturbance
Does not take control
action until the CVdeviates from its setpoint
Affects the stability of
the control system
Feedforward and Feedback are complementary
CLASS EXERCISE: SOME QUESTIONS ABOUT
FEEDFORWARD CONTROL
Why do we retain the feedback controller?
When would feedforward give zero steady-state offset?
Why does the feedforward controller sometimes delay itscompensation? Don’t we always want fast control?
What is the additional cost for feedforward control?
How can we design a strategy that has two controlersboth adjusting the same valve?
What procedure is used for tuning the feedforwardcontrol?
CHAPTER 15: FEEDFORWARD CONTROL