Download Variable Structure Control-Process Control-Lecture Slides and more Slides Process Control in PDF only on Docsity!
CHAPTER 22: VARIABLE STRUCTURE
CONTROL
When I complete this chapter, I want to be
able to do the following.
Understand why many applications ofprocess control require variable structure
Implement a design using more than onevalve in a “control loop”
Implement a design using more than onecontrolled variable in a “control loop”
Outline of the lesson.
Reasons for variable structure
Split range control
Signal select control
Applications for constraint control
Workshop
CHAPTER 22: VARIABLE STRUCTURE
CONTROL
CHAPTER 22: VARIABLE STRUCTURE CONTROL
Sometimes, the control objectives cannot be achieved with a strictpairing of one sensor/controller/valve. We need the flexibility to changethe pairing automatically, as part of the control system.In this chapter, we will learn methods that are easily applied
Retain the PID (or IMC) single-loop controller
Use the same tuning approachesThis advantage is gained by accepting the following limitations
One controller - many valves
Many controllers - one valve
CHAPTER 22: VARIABLE STRUCTURE CONTROL
Split range
-^ -^
We often manipulate several variables toachieve our objectives.For example, to achieve a comfortabletemperature in a room.
cooling
heating
CHAPTER 22: VARIABLE STRUCTURE CONTROL
Fuel A Fuel B
fc fc
To consumers.
PC
Measured variablePressure is constant when flowsin and out are the same.Manipulated variableEither valve has causalrelationship and fast dynamicsDisturbancesChanges in consumption rate
Which valve??
We chose to control pressure.
Split range
-^ -^
CHAPTER 22: VARIABLE STRUCTURE CONTROLx = controller output
Fuel A Fuel B
fc fc
To consumers.
PC
x
x x
Manipulating two valvesgives more flexibility, buthow does it work?First, if we adjust two valves,on what basis can we decidewhich valve to open first?
Hint:
We chose to adjust both valves!
Split range
-^ -^
CHAPTER 22: VARIABLE STRUCTURE CONTROLx = controller
output
Fuel A Fuel B
fc fc
To consumers.
PC x
x x
0
x, controller output %
opened closed
Valve opening
Fuel A
Fuel B
Split range: The valves are calibrated torespond as shown in the figure
Split range
-^ -^
Less expensive More expensive
CHAPTER 22: VARIABLE STRUCTURE CONTROL
Dynamic response of the split range control systemto two step increases in fuel consumption.
Split range
-^ -^
Fuel A Fuel B
fc fc
To consumers.
PC x
x x
Less expensive More expensive
First increase in consumption, PC increases itsoutput, which affects only v
A
Second increase in consumption, PC increases its output, whichincreases v
A^
to
its maximum, then begins to open v
.B
CHAPTER 22: VARIABLE STRUCTURE CONTROL
Split range is used widely in practice to provideflexibility, retain simple technology and employsimple calculations.
Split range
-^ -^ -^ SPLIT RANGE DESIGN CRITERIA
There is one controller and more than onefinal element.
There is a causal relationship between eachfinal element and the controlled variable.
The proper order for adjusting the finalelement adheres to a fixed priority ranking.
CHAPTER 22: VARIABLE STRUCTURE CONTROL
Signal Select
-^ •
We often try to achieve many objectives whenmanipulating one final element.For example, when we are driving.
Don’t be late for
process control class.
Don’t get a ticket
for speeding.
Get through the
intersection beforethe light turns red.
Don’t skid on
the icy road.
CHAPTER 22: VARIABLE STRUCTURE CONTROL
Signal Select
-^ •
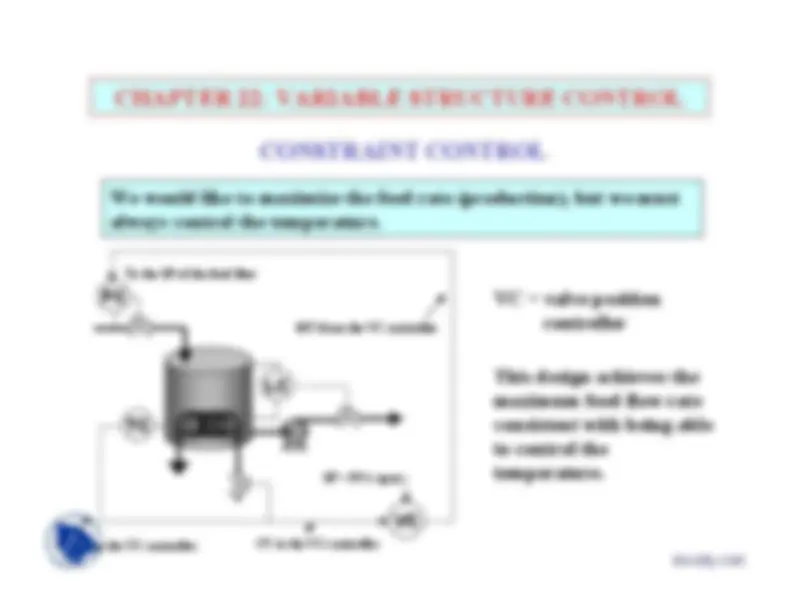
The process involves a CSTR with an exothermic reactionand a cooling coil. Generally, we wish to control thecomposition of the reactant in the effluent. However, wemust keep the temperature below a maximum limit toprevent damaging the glass lining of the reactor.
Looks good to me. What could go wrong?
T AC
LC
FC
CHAPTER 22: VARIABLE STRUCTURE CONTROL
Signal Select
-^ • -^
T AC
LC
FC
The controller did agood job of keepingC
A
near its set point.
Unfortunately, thedesign does notconsider T, whichexceeded itsmaximum. Theequipment wasdamaged!
Not acceptable
Disturbance is feedinhibitor increase.
CHAPTER 22: VARIABLE STRUCTURE CONTROL
Signal Select
-^ •
The process involves a CSTR with an exothermic reactionand a cooling coil. Generally, we wish to control thecomposition of the reactant in the effluent. However, wemust keep the temperature below a maximum limit toprevent damaging the glass lining of the reactor.
Now, the correct controller is selectedautomatically.Why was a low signal select used?Hint: What is the safest % valve opening?
= low signal select
AY
= calculation element
TC AC
LC
FC
AY
fo
CHAPTER 22: VARIABLE STRUCTURE CONTROL
Signal Select
-^ •
The controllercannot keep C
A
at
The design controlsT, as it approachesits maximum. Theequipment was notdamaged! its set point!
acceptable
Disturbance is feedinhibitor increase.
TC AC
LC
FC AY
<
fo