Download Feed Back Preformance-Process Control-Lecture Slides and more Slides Process Control in PDF only on Docsity!
CHAPTER 13: FEEDBACK PERFORMANCE
When I complete this chapter, I want to be
able to do the following.
Apply two methods for evaluating controlperformance: simulation and frequencyresponse
Apply general guidelines for the effect of- feedback dead time- disturbance time constant- MV variability- sensor and final element dynamics
Outline of the lesson.
Apply dynamic simulation
Apply frequency response to closed-loop performance
Guidelines for the effects of the process
Guidelines for the effects of the controlsystem
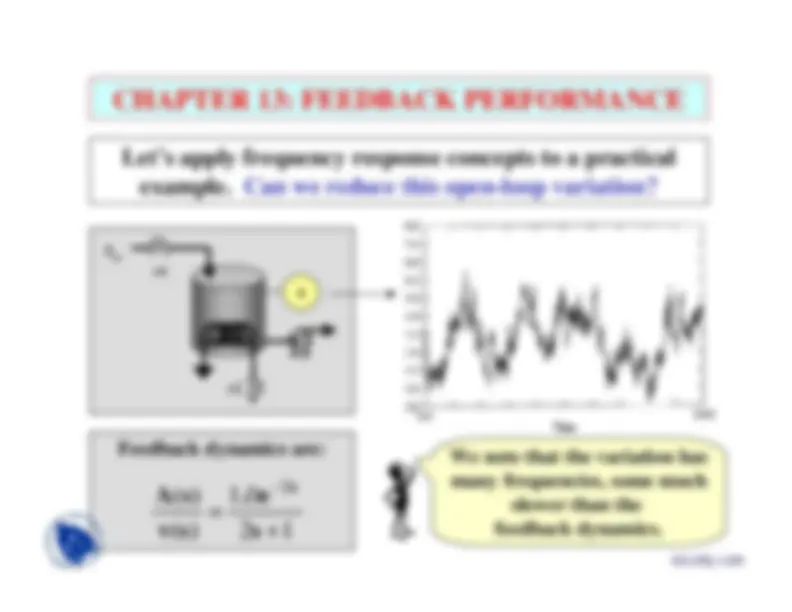
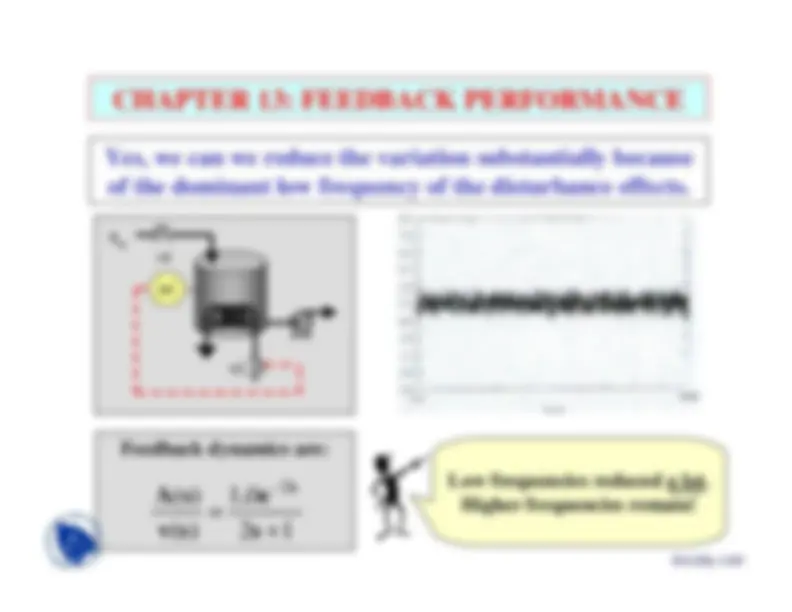
CHAPTER 13: FEEDBACK PERFORMANCE
CHAPTER 13: FEEDBACK PERFORMANCE
Evaluating control performance
During design, test possible plant changes, and developprinciples for guidelines- Dynamic simulation- Frequency Response
During plant operation- Fine tuning guidelines for set point- Complementary guideline for step disturbance- Monitor the performance
CHAPTER 13: FEEDBACK PERFORMANCE
Dynamic simulation solves the equations describing theprocess and controller - numerically because of complexityof systems. For example,
TC
v
v
∫
−
−
=
−
=
−
=
∆
=
=
≈
−
−
∆
−
−
=
−
−
=
−
−
t
m
SP
I
m
SP
c
valve
m
m
sensor
c
v
c
in
cout
cin
A
RT
E
rxn
p
P
A
RT
E
A
A
A
dt
T T T T T K
MV
MV
v
dt dv
T
T
dt
dT
P
C
v
aF
h
U
T
T
T
UA
C
e
Vk
H
T
T
C
F
dt
dT
C
V
C
e
Vk
C
C
F
dt
dC
V
0
6
0
0
0
0
0
1
'
)
(
)
(
)
(
)
(
)
(
))
(
(
)
(
)
(
)
(
max
.
/
/
τ τ
ρ
ρ
ρ
Many numerical
methods; Euler,
Runge-Kutta,
or other.
docsity.com
0
50
100
150
0.9880.9860.9840.
IAE = 0.22254 ISE = 0.
Time (min)
XD (mol frac)
0
50
100
150
0.05 0.04 0.03 0.02 0.
IAE = 0.8863 ISE = 0.
Time (min)
XB (mol frac)
0
50
100
150
8550 8500 8450 8400 8350
Time (min)
R (mol/min)
0
50
100
150
1.38 1.36 1.
x 10
4
Time (min)
V (mol/min)
CHAPTER 13: FEEDBACK PERFORMANCE
Dynamic simulation is general and powerful.
F
R
F
V
x
B
x
D
AC
AC
DISTIL: Results of detailed, non-linear, tray-by-tray dynamic model with PID feedbackcontrollers. Simulation in MATLAB.
xF
docsity.com
PRESENT VALUES
1) Total simulation time
100.
2) Time step for simulation
0.
3) Set point change
0.
4) Disturbance change
0.
5) Process reaction curve MV input
0.
6) Select continuous/digital controller, currently continuous
(Controller executed every simulation time step)
7) Execute dynamic simulation8) Return to main menu
0
20
40
60
80
100
120
0
0.4 0.3 0.2 0.
S-LOOP plots deviation variables (IAE = 7.5136)
Time
Controlled Variable
0
20
40
60
80
100
120
-10 -15 -20 -
0
Time
Manipulated Variable
)
1
2
)(
1
)(
1
(
)
1
(
3
2
2 3
2
1
s
−
s
s
s
s
s
e
K
lead
p
ξτ
τ
τ
τ
τ
θ
s
T
s
T
K
d
I
c
1
1
SP(s)
MV(s)
D(s)
CV(s)
Disturbance model
Process feedback modelPID controller model
Controlledvariable
Setpoint
Disturbance
Manipulatedvariable
)
1
2
)(
1
)(
1
(
)
1
(
3
2
2
3
2
1
_
s
−
s
s
s
s
s
e
K
d
d
d
d
d
d
lead
d
d
τ
ξ
τ
τ
τ
τ
θ
CHAPTER 13: FEEDBACK PERFORMANCE
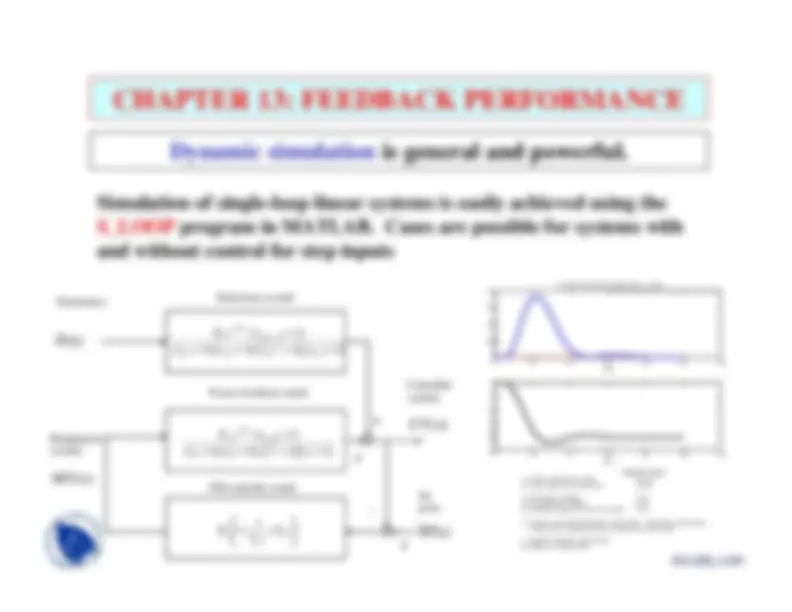
Dynamic simulation is general and powerful.
Simulation of single-loop linear systems is easily achieved using theS_LOOP program in MATLAB. Cases are possible for systems withand without control for step inputs
docsity.com
CHAPTER 13: FEEDBACK PERFORMANCE
Frequency Response: determines the response of systemsvariables to a sine input.
Professors want to ruin the semester for students
Perfect sine disturbances occur frequently inplants
We want another case for dynamic simulation
We use sine to characterize time-varying inputs,especially disturbances
We can learn useful generalizations about controlperformance
Why do we study frequency response?
No!
No!
No! Yes!
Yes!
Are you sure
of this answer?
CHAPTER 13: FEEDBACK PERFORMANCE
Frequency Response : Sine in
sine out without control
Process dynamics for
disturbance T
in
to T
K
d
θθθθ
τ τ
τ τ
min
Process dynamics for
MV v
2
to T
K
p
θθθθ
ττττ
= 5 min
Three cases withamplitude 1 K anddifferent T
in
sine
periods, P.
A
P = 5000 minP = 50 minP = 0.05 min
For each case,what is the outputamplitude?
Let’s do a
thought
experiment,
without
calculating!
B
C
T
v
v
T
in
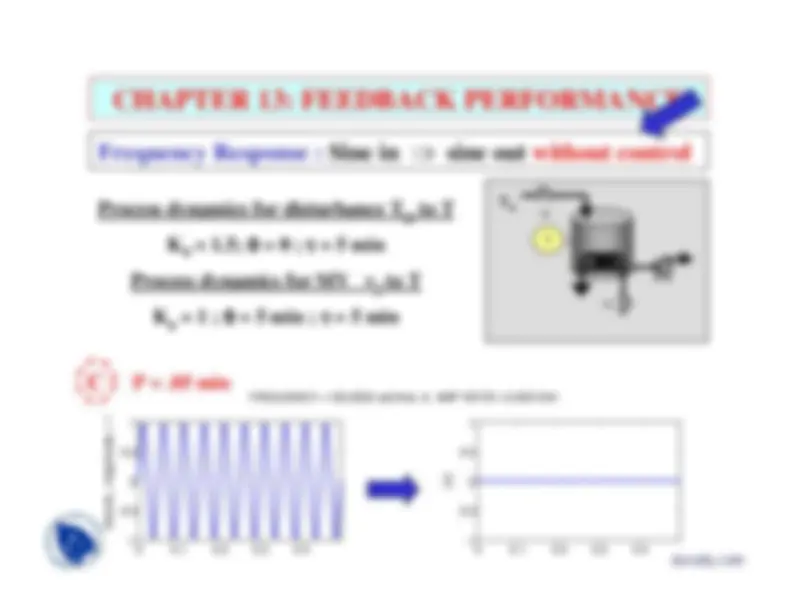
CHAPTER 13: FEEDBACK PERFORMANCE
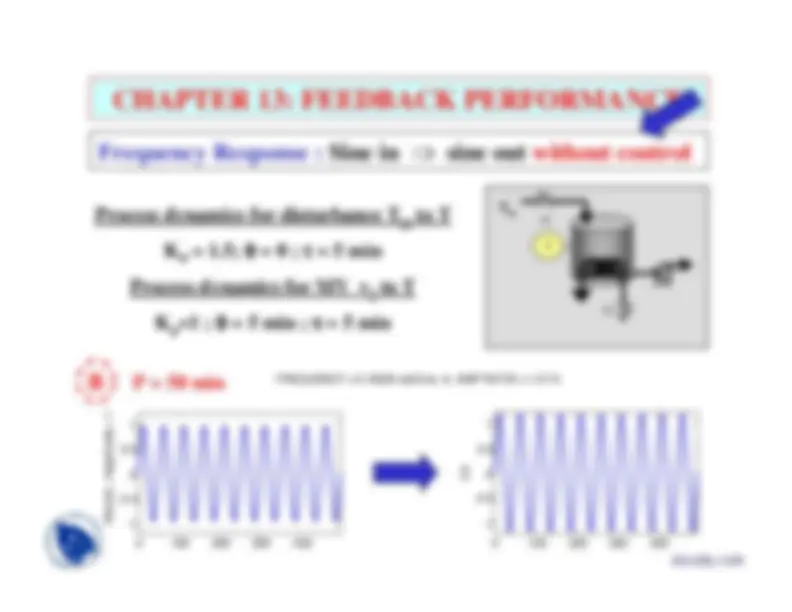
Frequency Response : Sine in
sine out without control
Process dynamics for disturbance T
in
to T
K
d
θθθθ
ττττ
= 5 min
Process dynamics for MV v
2
to T
K
p
θθθθ
= 5 min ;
τ τ
τ τ
= 5 min
T
v
v
T
in
B
FREQUENCY =0.12629 rad/time & AMP RATIO =1.
0
100
200
300
400
-0.
0
1
CV
0
100
200
300
400
-0.
0
1
Disturb., magnitude = 1
P = 50 min
CHAPTER 13: FEEDBACK PERFORMANCE
Frequency Response : Sine in
sine out without control
Process dynamics for disturbance T
in
to T
K
d
θθθθ
ττττ
= 5 min
Process dynamics for MV
v
2
to T
K
p
θθθθ
= 5 min ;
ττττ
= 5 min
T
v
v
T
in
C
P = .05 min
FREQUENCY =126.2939 rad/time & AMP RATIO =0.
0
-0.
0
1
CV
0
-0.
0
1
Disturb., magnitude = 1
CHAPTER 13: FEEDBACK PERFORMANCE
Frequency Response : Sine in
sine out with control
Process dynamics for
disturbance T
in
to T
K
d
θ θ
θ θ
= 0 min ;
ττττ
5 min
Process dynamics for
MV
v
2
to T
K
p
θθθθ
ττττ
= 5 min
Three cases withamplitude 1 K anddifferent T
in
sine
periods, P.
A
P = 5000 minP = 5 minP = 0.005 min
For each case,what is the outputamplitude?
Let’s do a
thought
experiment,
without
calculating!
B
C
TC v
v
T
in
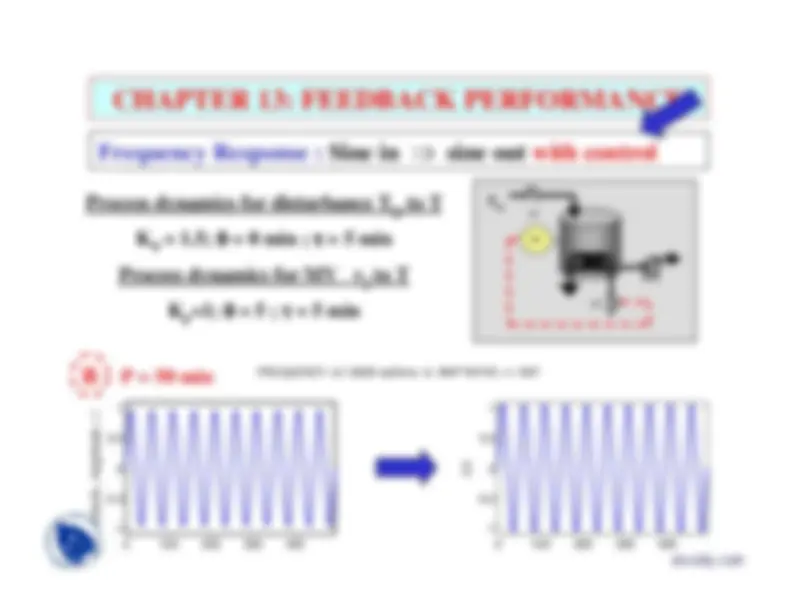
CHAPTER 13: FEEDBACK PERFORMANCE
Frequency Response : Sine in
sine out with control
Process dynamics for disturbance T
in
to T
K
d
θθθθ
= 0 min ;
τ τ
τ τ
= 5 min
Process dynamics for MV
v
2
to T
K
p
θθθθ
τ τ
τ τ
= 5 min
TC v
v
T
in
FREQUENCY =0.0012496 rad/time & AMP RATIO =0.
0
1
2
3
4
5
x 10
4
-0.
0
1
CV
0
1
2
3
4
5
x 10
4
-0.
0
1
Disturb., magnitude = 1
A
P = 5000 min
docsity.com
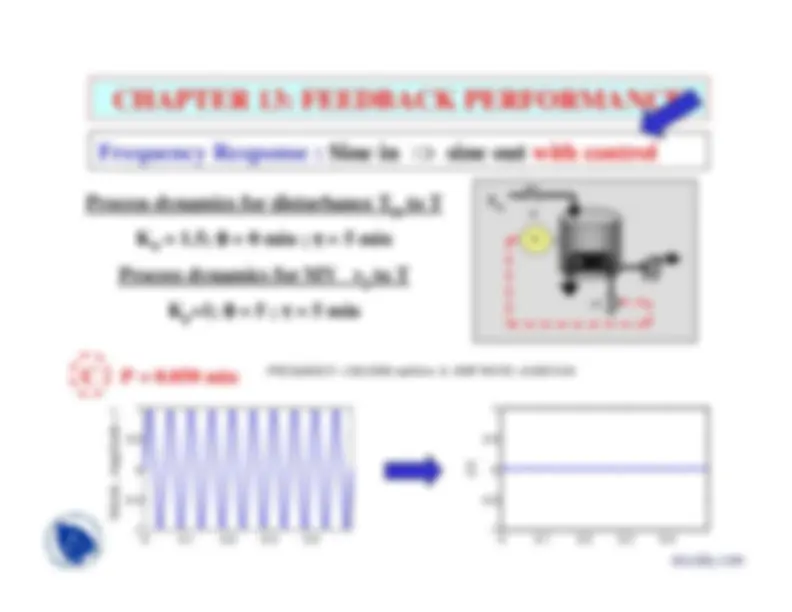
CHAPTER 13: FEEDBACK PERFORMANCE
Frequency Response : Sine in
sine out with control
Process dynamics for disturbance T
in
to T
K
d
θθθθ
= 0 min ;
τ τ
τ τ
= 5 min
Process dynamics for MV
v
2
to T
K
p
θθθθ
ττττ
= 5 min
TC v
v
T
in
B
P = 50 min
FREQUENCY =0.12629 rad/time & AMP RATIO =1.
0
100
200
300
400
-0.
0
1
CV
0
100
200
300
400
-0.
0
1
Disturb., magnitude = 1
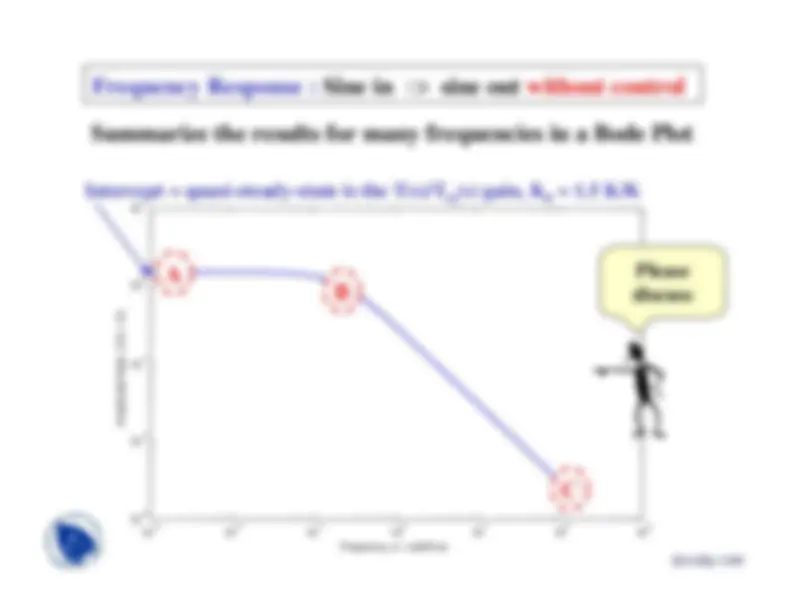
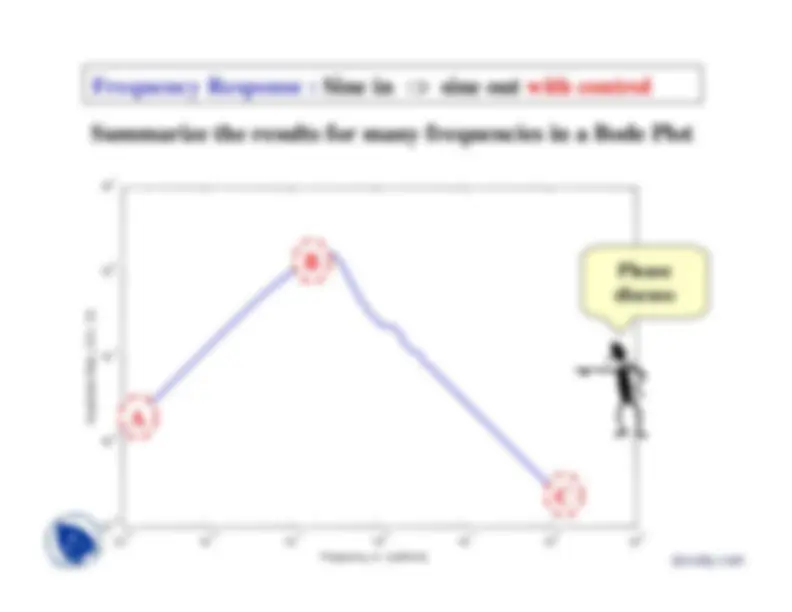
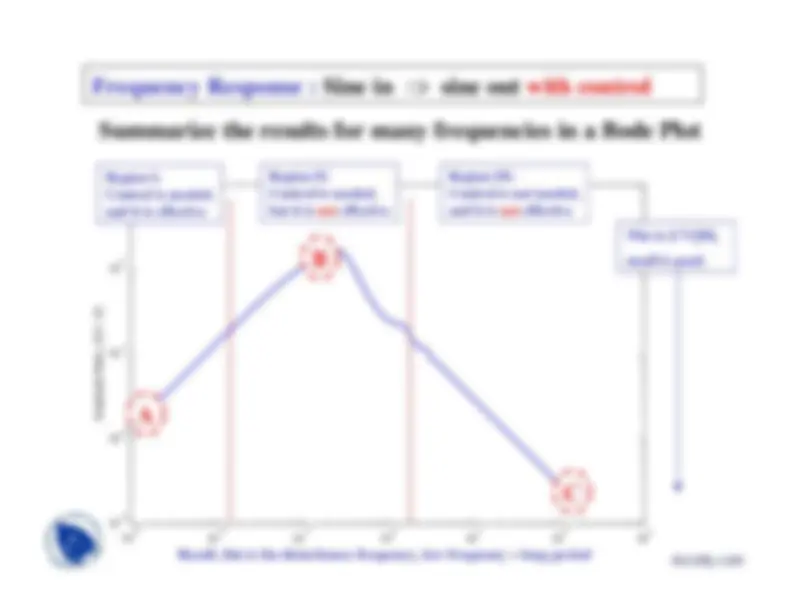
Frequency Response : Sine in
sine out with control
Summarize the results for many frequencies in a Bode Plot
10
10
10
10
0
10
1
10
2
10
3
10
10
10
10
0
10
1
Frequency, w (rad/time)
Amplitude Ratio, |CV| / |D|
A
B
C
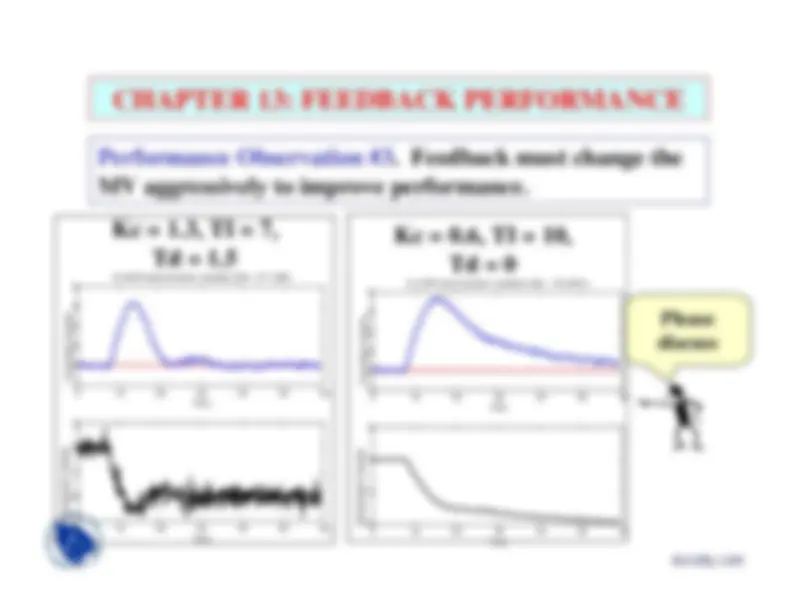
Please
discuss