Download PID Tunung-Process Control-Lecture Slides and more Slides Process Control in PDF only on Docsity!
CHAPTER 9: PID TUNING
When I complete this chapter, I want to be
able to do the following.
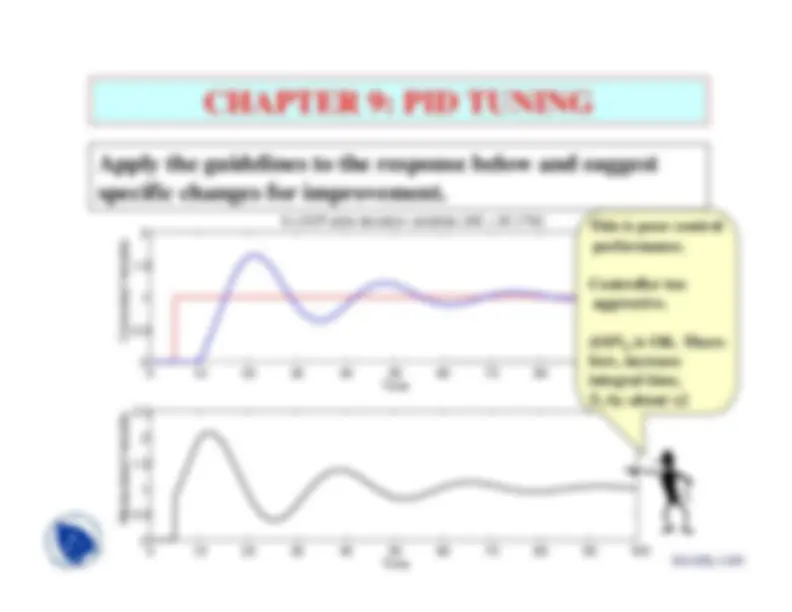
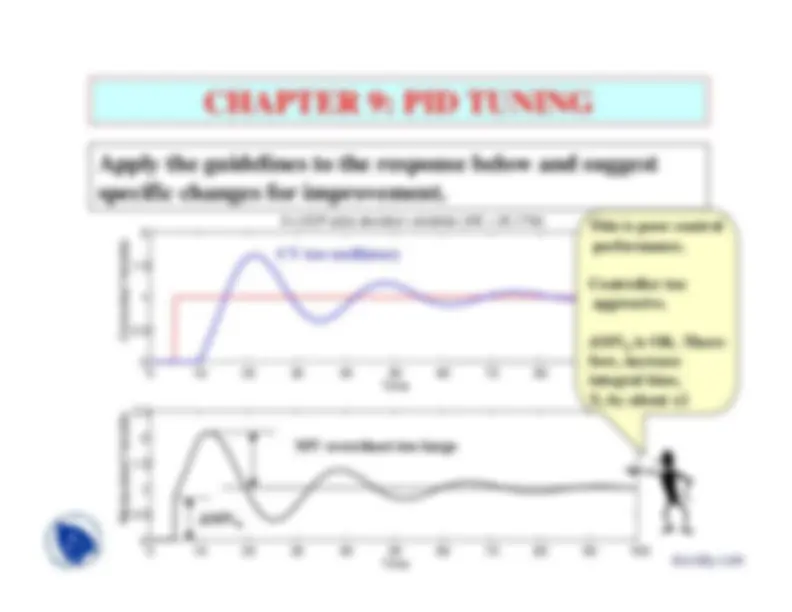
Explain the performance goals that weseek to achieve via tuning.
Apply a tuning procedure using theprocess reaction curve and tuningcorrelations.
Further improve performance by finetuning
docsity.com
Outline of the lesson.
CHAPTER 9: PID TUNING
A trial and error approach - why wedon’t use it
Define the tuning problem
Solve and develop correlations
Apply correlations to examples
Fine tune - the personal touch
docsity.com
CHAPTER 9: PID TUNING
How do we apply the same equation to many processes?
How to achieve the dynamic performance that we desire?
TUNING!!!
I
dt
CV
d
T
dt
t E T t E K t
MV
d
I
c
The adjustable parameters are called tuning constants.We can match the values to the process to affect thedynamic performance
docsity.com
CHAPTER 9: PID TUNING
I
CVdt
d
T
dt
t E T t E K t
MV
d
I
c
∞^0
AC
Trial 1:unstable,lost $25,
0
20
40
60
80
100
120
-20 -
0 40 20
S-LOOP plots deviation variables (IAE = 608.1005)
Time
Controlled Variable
0
20
40
60
80
100
120
0 50 100
Time
Manipulated Variable
Trial 2: tooslow, lost$3,
0
20
40
60
80
100
120
0 0.80.60.40.
1
S-LOOP plots deviation variables (IAE = 23.0904)
Time
Controlled Variable
0
20
40
60
80
100
120
0 0.80.60.40.
1
Time
Manipulated Variable
0
20
40
60
80
100
120
0
1
S-LOOP plots deviation variables (IAE = 9.7189)
Time
Controlled Variable
0
20
40
60
80
100
120
0
1
Time
Manipulated Variable
Trial n:OK, finally,but tookway toolong!!
Is there
an easier
way than
trial &error?
docsity.com
CHAPTER 9: PID TUNING
Define the tuning
problem
1. Process
Dynamics
2. Measured
variable
3. Model error4. Input forcing5. Controller6. Performance
measures
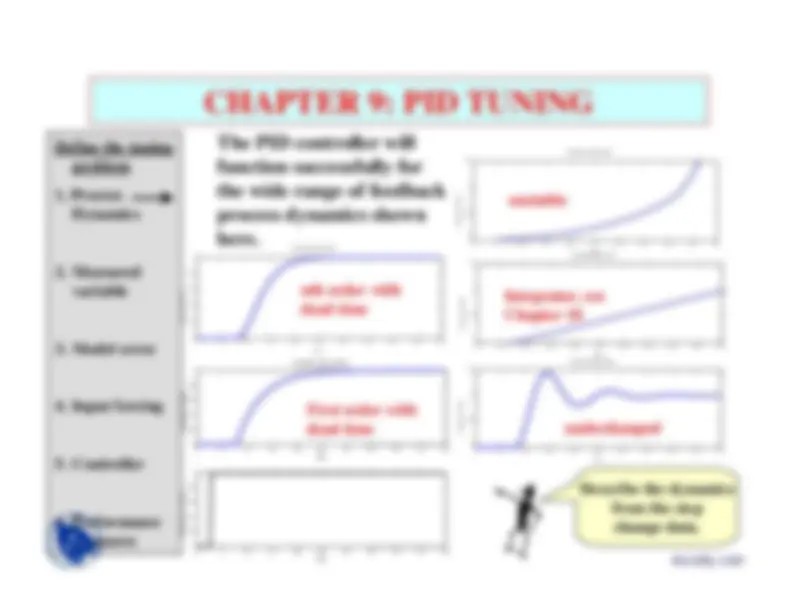
The PID controller willfunction successfully forthe wide range of feedbackprocess dynamics shownhere.
DYNAMIC SIMULATION
Time
Controlled Variable
Time
Manipulated Variable
DYNAMIC SIMULATION
Time
Controlled Variable
DYNAMIC SIMULATION
Time
Controlled Variable
DYNAMIC SIMULATION
Time
Controlled Variable
DYNAMIC SIMULATION
Time
Controlled Variable
Describe the dynamics
from the step
change data.
docsity.com
CHAPTER 9: PID TUNING
Define the tuning
problem
1. Process
Dynamics
2. Measured
variable
3. Model error4. Input forcing5. Controller6. Performance
measures
The PID controller willfunction successfully forthe wide range of feedbackprocess dynamics shownhere.
DYNAMIC SIMULATION
Time
Controlled Variable
Time
Manipulated Variable
DYNAMIC SIMULATION
Time
Controlled Variable
DYNAMIC SIMULATION
Time
Controlled Variable
DYNAMIC SIMULATION
Time
Controlled Variable
DYNAMIC SIMULATION
Time
Controlled Variable
First order withdead time
nth order withdead time
unstable
Integrator, seeChapter 18
underdamped
Describe the dynamics
from the step
change data.
docsity.com
CHAPTER 9: PID TUNING
Define the tuning
problem
1. Process
Dynamics
2. Measured
variable
3. Model error4. Input forcing5. Controller6. Performance
measures
Realistic situation: The measured variable willinclude the effects of sensor noise and higherfrequency process disturbances.
DYNAMIC SIMULATION
Time
0
5
10
15
20
25
30
35
40
45
50
-0.
0
1
Time
Controlled Variable
0
5
10
15
20
25
30
35
40
45
50
0
0.8 0.6 0.4 0.
1
Manipulated Variable
docsity.com
CHAPTER 9: PID TUNING
Define the tuning
problem
1. Process
Dynamics
2. Measured
variable
3. Model error4. Input forcing5. Controller6. Performance
measures
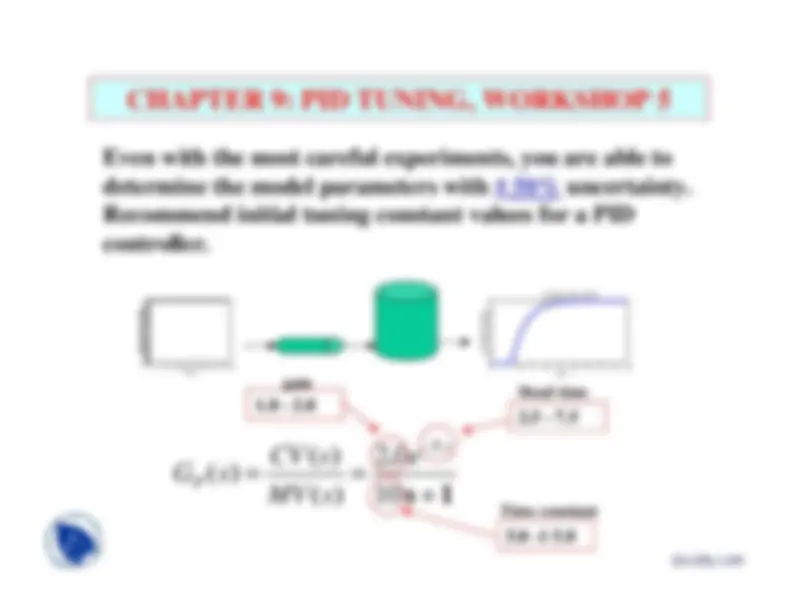
Realistic situation: The model does notrepresent the process exactly. We will assumethat the model has
25% errors in gain, time
constant and dead time, for example:
DYNAMIC SIMULATION
Time
Controlled Variable
Time
Manipulated Variable
s
s
P
e
s
MV
s
CV
s
G
gain
Dead time
Time constant
docsity.com
CHAPTER 9: PID TUNING
Define the tuning
problem
1. Process
Dynamics
2. Measured
variable
3. Model error4. Input forcing5. Controller6. Performance
measures
Realistic situation: We will consider the PIDcontroller, which is used for nearly all single-loop (1CV, 1MV) controllers.
solvent
pure A
AC
F
S
F
A
SP
I
CVdt
d
T
dt
t E T t E K t
MV
d
I
c
∞^0
docsity.com
CHAPTER 9: PID TUNING
Define the tuning
problem
1. Process
Dynamics
2. Measured
variable
3. Model error4. Input forcing5. Controller6. Performance
measures
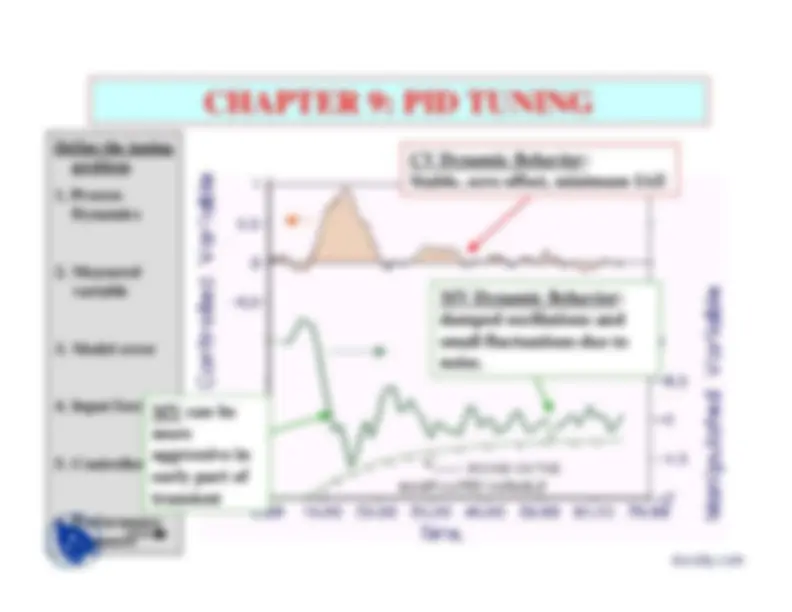
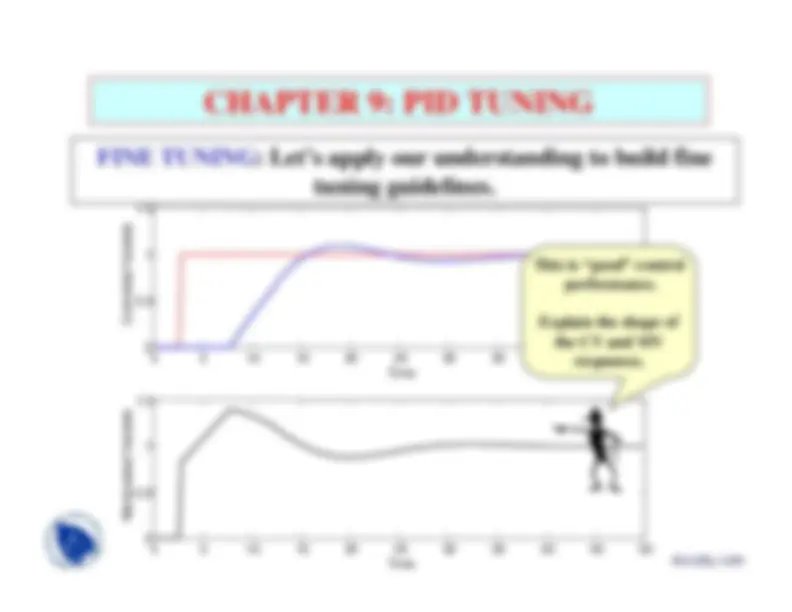
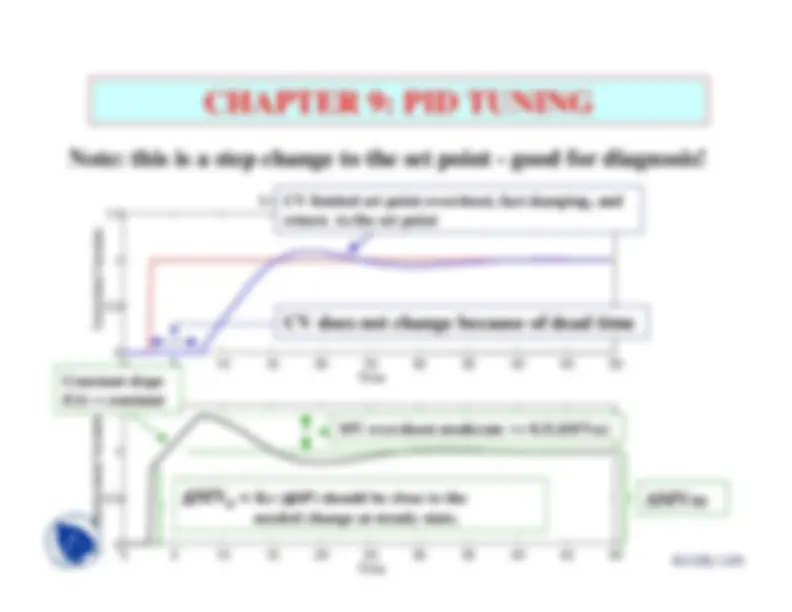
CV Dynamic Behavior:Stable, zero offset, minimum IAE
MV Dynamic Behavior:damped oscillations andsmall fluctuations due tonoise.
MV can bemoreaggressive inearly part oftransient
docsity.com
CHAPTER 9: PID TUNING
Define the tuning
problem
1. Process
Dynamics
2. Measured
variable
3. Model error4. Input forcing5. Controller6. Performance
measures
Time
Manipulated Variable
Fuel flow
Large, rapid changesto the fuel flow causethermal stress thatdamages tubes.
FT 1
FT^2
PT 1
PI^1 AT^1
TI^1
TI 2
TI^3 TI^4
PI^2
PI^3
PI^4
TI^5
TI^6 TI^7
TI^8
FI 3
TI 10
TI 11
PI^5
PI^6
TC
Fuel
Our primary goal is to maintain the CV near
the set point. Besides not wearing out
the valve, why do we have goals for the MV?
docsity.com
CHAPTER 9: PID TUNING
Define the tuning
problem
1. Process
Dynamics
2. Measured
variable
3. Model error4. Input forcing5. Controller6. Performance
measures
COMBINED DEFINITION OF TUNING
PROBLEM FOR CORRELATION
First order with dead time process model
Noisy measurement signal
± 25% parameters errors betweenmodel/plant
PID controller: determine K
c
, T
I
, T
d
Minimize IAE with MV inside bound
We achieve the goals byadjusting Kc, TI and Td.Details in chapter andAppendix E.
docsity.com
CHAPTER 9: PID TUNING
0
20
40
60
80
100
120
5 0 15 10 CV
0
20
40
60
80
100
120
5 0 25 20 15 10
time
MV
0
20
40
60
80
100
120
5 0 15 10 CV
0
20
40
60
80
100
120
0 40 30 20 10
time
MV
0
20
40
60
80
100
120
5 0 15 10 CV
0
20
40
60
80
100
120
0 30 20 10
time
MV
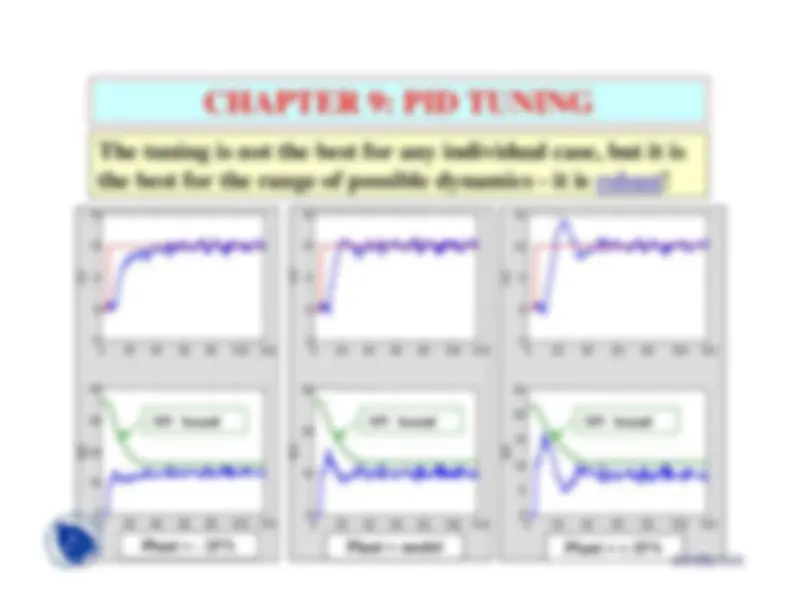
Plant = model
Plant = + 25%
Plant = - 25%
The tuning is not the best for any individual case, but it isthe best for the range of possible dynamics - it is robust!
MV bound
MV bound
MV bound
docsity.com
CHAPTER 9: PID TUNING
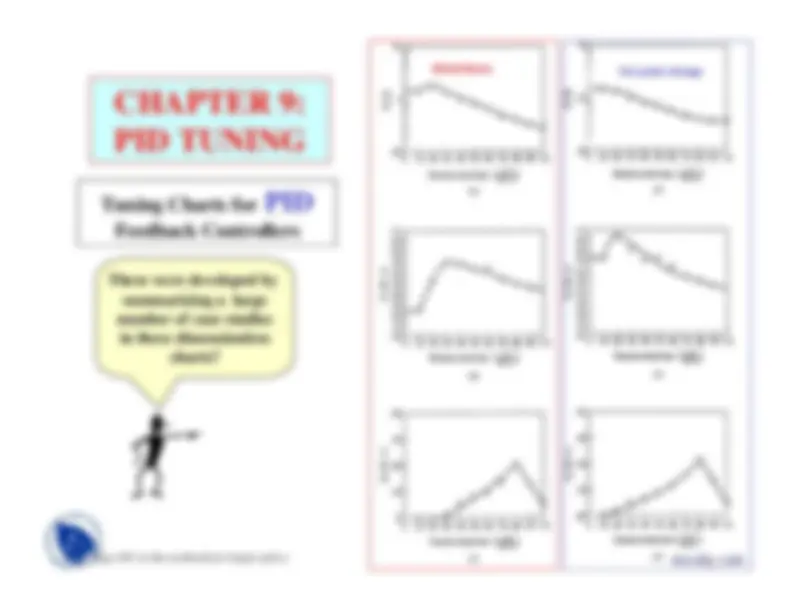
COMBINED DEFINITION OF TUNING
First order with dead time processmodel
Noisy measurement signal
± 25% parameters errors betweenmodel/plant
PID controller: determine K
c
, T
I , T
d
Minimize IAE with MV inside bound
Kp = 1 θθθθ
TC
v 1
v 2
0
5 10 15202530 35404550
-0. 1.5^1 0.5^00
5 10 1520253035 404550
(^1) 0.80.60.40.2 0
TC
v 1
v 2
Kc = 0.74TI = 7.5Td = 0.
0
20
40
60
80
100 120
5 0 (^1510) CV
0
20
40
60
80
100 120
0 30 20 10
time
MV
GoodPerformance
Processreaction curve
Solve the tuningproblem. Requires acomputer program.
docsity.com