



Robotique
Faouzi Lakrad
Année universitaire 2023-2024
Licence d’excellence Conception et Simulation Numérique en Mécanique (CSNM)























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Cet article de Faouzi Lakrad traite de la représentation des positions et des orientations dans le cadre de la robotique. Il aborde les systèmes de coordonnées, les conventions et les vecteurs unitaires. En outre, il explique le calcul du produit scalaire et la propriété orthogonale des matrices. Des applications pratiques sont également fournies.
Typology: Schemes and Mind Maps
1 / 32

This page cannot be seen from the preview
Don't miss anything!
Licence d’excellence Conception et Simulation Numérique en Mécanique (CSNM)
2
1
2
1
2
1
𝑥𝑦
𝑧
𝑧
= 𝑭 sin(𝜙)
𝑥𝑦
𝑥𝑦
𝒆 = 𝑭 cos 𝜙 𝒆
𝒆 = cos 𝜃 𝑥ො + sin 𝜃 𝑦ො
𝑭 = 𝐹 cos 𝜙 cos 𝜃 𝑥ො + cos 𝜙 sin 𝜃 𝑦ො + sin(𝜙) 𝑧Ƹ
Vecteurs unitaires du repère A :
𝐴
𝐴
𝐴
𝐴
𝐵
𝐵
𝐴
𝑇
𝐴
𝐵
𝐴
𝐵
𝑇
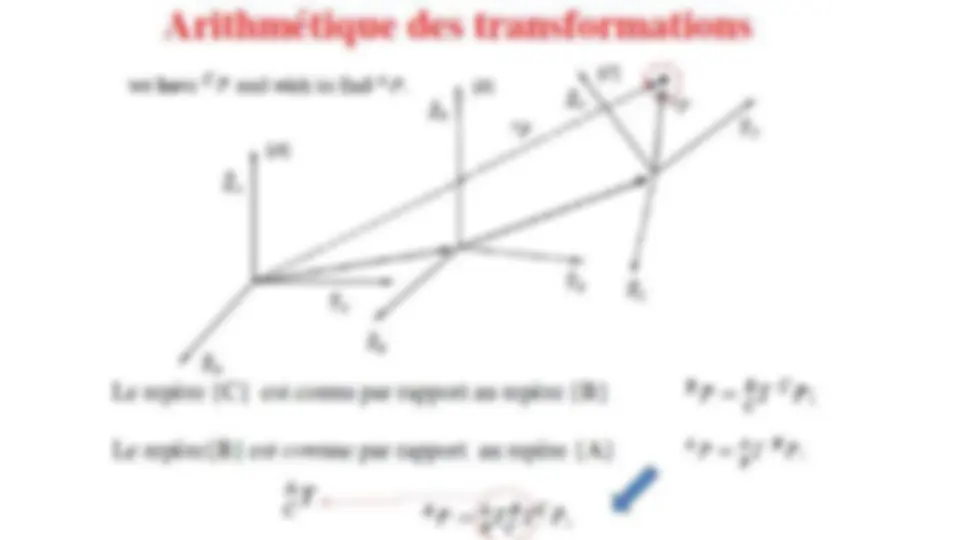
On veut calculer le vecteur
position
𝐴
0 𝜃
𝜃
𝜃
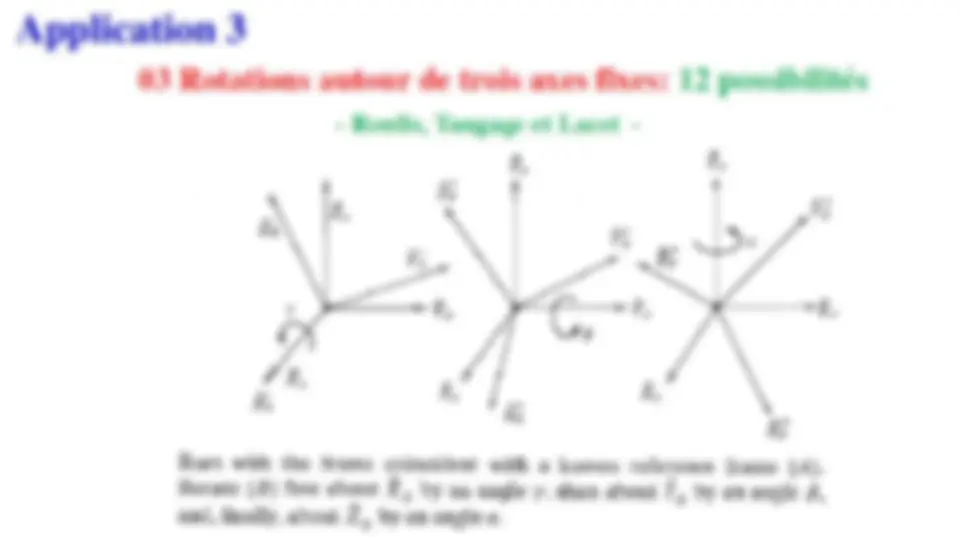
La non commutativité de la multiplication des matrices
𝐴
𝑅
𝑋 𝐴
, 𝛾 =
1 0 0
0 𝑐𝛾 −𝑠𝛾
0 𝑠𝛾 𝑐𝛾
𝐴
𝑅
𝑌 𝐴
, 𝛽 =
𝑐𝛽 0 𝑠𝛽
0 1 0
−𝑠𝛽 0 𝑐𝛽
𝐴
𝑅
መ 𝑍 𝐴
, 𝛼 =
𝑐𝛼 −𝑠𝛼 0
𝑠𝛼 𝑐𝛼 0
0 0 1
𝐵
𝐴
𝑅 𝛾, 𝛽, 𝛼 =
𝐴
𝑅
መ 𝑍, 𝛼
𝐴
𝑅
𝑌, 𝛽.
𝐴
𝑅
𝑋, 𝛾
cos 𝜃 ≡ 𝑐𝜃
sin 𝜃 ≡ 𝑠𝜃
Notations