Download The PID Controller-Process Control-Lecture Slides and more Slides Process Control in PDF only on Docsity!
CHAPTER 8: THE PID CONTROLLER
When I complete this chapter, I want to be
able to do the following.
Understand the strengths and weaknessesof the three modes of the PID
Determine the model of a feedback systemusing block diagram algebra
Establish general properties of PIDfeedback from the closed-loop model
docsity.com
Outline of the lesson.
General Features and history of PID
Model of the Process and controller - theBlock Diagram
The Three Modes with features- Proportional- Integral- Derivative
Typical dynamic behavior
CHAPTER 8: THE PID CONTROLLER
docsity.com
CHAPTER 8: THE PID CONTROLLER
SOME BACKGROUND IN THE CONTROLLER
v1 TC
v
Developed in the 1940’s, remainsworkhorse of practice
Not “optimal”, based on goodproperties of each mode
Preprogrammed in all digitalcontrol equipment
ONE controlled variable (CV) andONE manipulated variable (MV).Many PID’s used in a plant.
docsity.com
CHAPTER 8: THE PID CONTROLLER
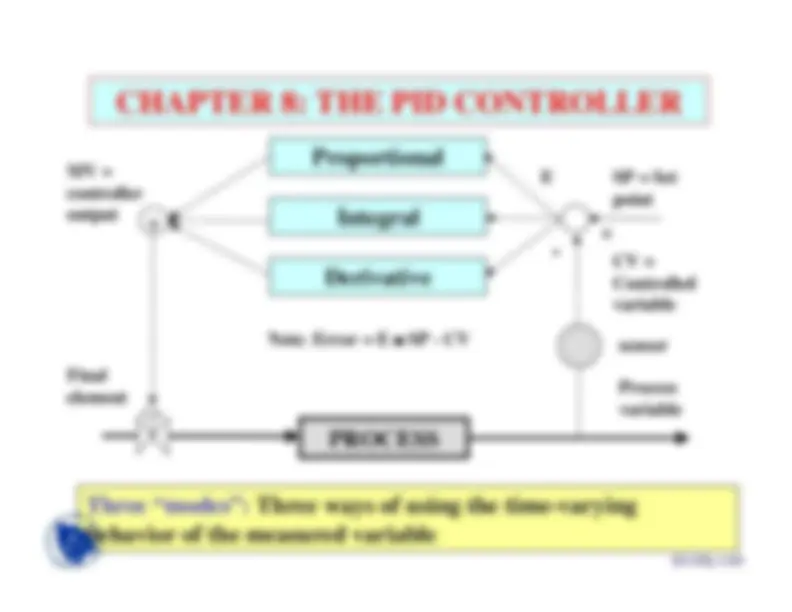
PROCESS
Proportional
Integral
Derivative
sensor
SP = Setpoint CV =Controlledvariable
E
Finalelement
Processvariable
MV =controlleroutput
Note
Error = E
SP - CV
Three “modes”: Three ways of using the time-varyingbehavior of the measured variable
docsity.com
CHAPTER 8: THE PID CONTROLLER
GENERAL CLOSED-LOOP MODEL BASED ON BLOCK DIAGRAM
G
d
(s)
G
P
(s)
G
v
(s)
G
C
(s)
G
S
(s)
D(s)
CV(s)
CV
m
(s)
SP(s)
E(s)
MV(s)
Transfer functionsG
C
(s) = controller
G
v
(s) = valve +
G
P
(s) = feedback process
G
S
(s) = sensor
G
d
(s) = disturbance process
VariablesCV(s) = controlled variableCV
m
(s) = measured value of CV(s)
D(s) = disturbanceE(s) = errorMV(s) = manipulated variableSP(s) = set point
docsity.com
CHAPTER 8: THE PID CONTROLLER
G
d
(s)
G
P
(s)
G
v
(s)
G
C
(s)
G
S
(s)
D(s)
CV(s)
CV
m
(s)
SP(s)
E(s)
MV(s)
Where are the models for the transmission, and signalconversion?
What is the difference between CV(s) and CV
m
(s)?
What is the difference between G
P
(s) and G
d
(s)?
How do we measure the variable whose line isindicated by the red circle?
Which variables are determined by a person, which bycomputer?
Let’s audit
our
understanding
docsity.com
PROCESS
Proportional
Integral Derivative
SP CV
E
MV
Note
Error = E
SP - CV
CHAPTER 8:
THE PID CONTROLLER,
The Proportional Mode
p
c
I
t
E
K
t
MV
=
)
(
)
(
:
domain
Time
C
C
K
s
E
s
MV
s
G
=
=
)
(
)
(
)
(
:
function
Transfer
K
C
= controller gain
“correction proportional to
error.”
How does this differ from
the process gain, K
p
?
docsity.com
PROCESS
Proportional
Integral Derivative
SP CV
E
MV
Note
Error = E
SP - CV
CHAPTER 8:
THE PID CONTROLLER,
The Proportional Mode
p
c
I
t
E
K
t
MV
=
)
(
)
(
:
domain
Time
docsity.com
PROCESS
Proportional
Integral Derivative
SP CV
E
MV
Note
Error = E
SP - CV
CHAPTER 8:
THE PID CONTROLLER,
The Proportional Mode
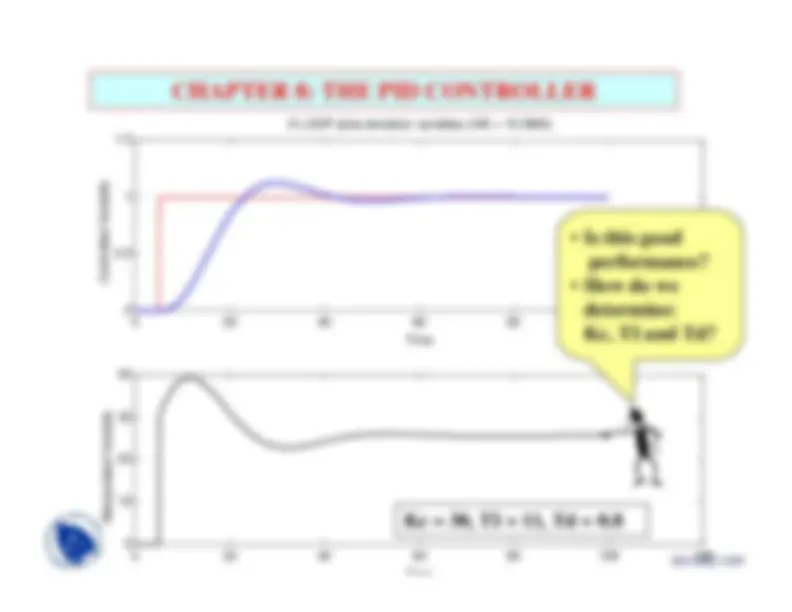
Key features using closed-loop dynamic model
Final valueafterdisturbance:
0
1
1
0
≠
∆
=
∆
=
→
∞
→
p
c
d
p
d c
s
t
K
K
K
D
K
K K
s D
s
t
CV
lim
)
(
We do not achieve zero offset; don’t return to set point!
How can we get very close by changing a controllerparameter?
Any possible problems with suggestion?
docsity.com
THE PID CONTROLLER,The Proportional Mode
0
20
40
60
80
100
120
140
160
180
200
-0.
0 0.3 0.2 0.
Tim e
Controlled V ariable
0
20
40
60
80
100
120
140
160
180
200
-20 -40 -
0 20
Tim e
M anipulated V ariable
0
20
40
60
80
100
120
140
160
180
200
0 0.8 0.6 0.4 0.
Tim e
Controlled V ariable
0
20
40
60
80
100
120
140
160
180
200
(^0) -2 -4 -
Tim e
M anipulated V ariable
0
20
40
60
80
100
120
140
160
180
200
0
Tim e
Controlled V ariable
0
20
40
60
80
100
120
140
160
180
200
-10 -15 -20 -
(^0) -
Tim e
M anipulated V ariable
0
20
40
60
80
100
120
140
160
180
200
0 0.8 0.6 0.4 0.
Tim e
Controlled V ariable
0
20
40
60
80
100
120
140
160
180
200
-0.
0
1
Tim e
M anipulated V ariable
Kc = 0
Kc =
Kc = 100
Kc = 220
docsity.com
PROCESS
Proportional
Integral Derivative
SP CV
E
MV
Note
Error = E
SP - CV
CHAPTER 8:
THE PID CONTROLLER,
The Integral Mode
I
I
c
I
dt
t
E
K T
t
MV
∫
=
∞^0
' ) ' ( ) ( :
domain
Time
Slope = K
C
E/T
I
MV(t)
time
Behavior when E(t) = constant
docsity.com
PROCESS
Proportional
Integral Derivative
SP CV
E
MV
Note
Error = E
SP - CV
CHAPTER 8:
THE PID CONTROLLER,
The Integral Mode
Key features using closed-loop dynamic model
Final valueafterdisturbance:
0
1
0
=
∆
=
→
∞
→
I
p
c
d
s
t
sT
K
K
K
s
D
s
t
CV
lim
)
(
We achieve zero offset; return to set point!
Are there other scenarios where we do not?
docsity.com
PROCESS
Proportional
Integral Derivative
SP CV
E
MV
Note
Error = E
SP - CV
CHAPTER 8:
THE PID CONTROLLER,
The Derivative Mode
Key features using closed-loop dynamic model
Final valueafterdisturbance:
d
d
d c
s
t
K
D
s
T
K K
s D
s
t
CV
lim
)
(
∆
=
∆
=
→
∞
→
1
0
We do not achieve zero offset; do not return to
set point!
docsity.com
PROCESS
Proportional
Integral Derivative
SP CV
E
MV
Note
Error = E
SP - CV
CHAPTER 8:
THE PID CONTROLLER,
The Derivative Mode
D
D
c
I
dt
t
dE
T
K
t
MV
=
)
(
)
(
:
domain
Time
What would be the behavior of the manipulatedvariable when we enter a step change to the set point?
How can we modify the algorithm to improve theperformance?
docsity.com