¡Descarga Electroneumatica Industrial y más Esquemas y mapas conceptuales en PDF de Electrotecnia solo en Docsity!
Unidad III
CCOOMMPPOONNEENNTTEESS EELLÉÉCCTTRRIICCOOSS YY
ELELEECCTTRROONNEEUUMMÁÁTTIICCOOSS
La sección del mando en sistemas electro-neumáticos o electro-hidráulicos esta compuesto de componentes eléctricos y electrónicos. Dependiendo de la tarea a ser realizada, la parte del mando puede variar en el diseño:
Los mandos relativamente simples usan componentes electromecánicos (por ejemplo los relays) o una combinación de componentes electromecánicos y los componentes electrónicos.
Para las tareas complejas, particularmente el PLC es el màs usado para el mando.
Para garantizar el correcto dimensionado de mandos y la rápida localización de errores cuando aparecen es necesario conocer los elementos operativos su constitución, función y aplicación, así como sus símbolos en los esquemas eléctricos.
En este capítulo nos proponemos presentar los elementos para la entrada, el procesamiento y la conversión de señales.
1. UNIDAD DE ALIMENTACIÓN DE ENERGÍA
Los sistemas de mando Electro-hidráulico generalmente no se alimentan con electricidad de sus propias fuentes de voltaje (por ejemplo las baterías), sino a través de conductores desde otro suministro principal, vía una unidad de la alimentación eléctrica, llamada también Fuente de alimentación, Fuente de energía.
Los módulos de una unidad de la alimentación eléctrica
Figura 3.
La unidad de la fuente de energía consiste en los siguientes módulos:
- El transformador de tensión, que transforma el voltaje alterno que llega del suministro principal (por ejemplo 220 V) en el voltaje adecuado para el mando (principalmente 24 V).
- Un voltaje directo DC aplanado (rizado) se genera por el rectificador y el condensador.
- El voltaje DC se estabiliza entonces por el regulador en la línea.
2. ELEMENTOS ELÉCTRICOS DE ENTRADA.
Los Interruptores se instalan en un circuito para abrir o cerrar el flujo de corriente hacia algún dispositivo.
En cuanto a la función se distingue entre los elementos contacto de cierre, contacto de apertura y contacto de conmutación.
El contacto de cierre (normalmente abierto) tiene el cometido de cerrar el circuito, el contacto de apertura (normalmente cerrado) ha de abrir el circuito, el contacto de conmutación abre o cierra el circuito.
Contacto de cierre NA contacto de apertura NC contacto de conmutación
Figura 3.
El contacto de conmutación es un ensamblaje constructivo de contacto de cierre y contacto de apertura. Ambos contactos tienen un elemento móvil de conexión. Este elemento de conexión, en posición de reposo tiene contacto siempre sólo con una conexión.
El accionamiento de estos elementos puede tener lugar manual o mecánicamente o bien por mando a distancia (energía de mando eléctrica, neumática).
Estos interruptores son divididos en dos grupos principales "interruptores de botón" (Push-botton) y "interruptores de mando." (switch). Los dos tipos del interruptor están disponibles para el funcionamiento como contactos normalmente-cerrados, o normalmente-abiertos.
El pulsador (switch), un botón de presión sólo abre o cierra un circuito durante un tiempo, mientras el botón de presión se aprieta. Al soltarlo vuelve a ocupar la posición inicial.
quedando el circuito cerrado. Soltando el pulsador el muelle lleva los elementos de conexión a la posición inicial.
Figura 3.
Figura 3.
Un pulsador puede estar equipado también con varios contactos, por ejemplo 2 contactos de cierre y 2 contactos de apertura o 3 contactos de apertura.
3. SENSORES
Se usan los sensores para obtener información sobre el estado de un sistema y pasar esta información al control. En los sistemas electro-hidráulicos, o electro- neumáticos, los sensores son principalmente usados para las siguientes tareas:
- Obtener la posición de componentes de accionamiento.
- Medir y supervisar la presión y temperatura del fluido utilizado.
- Para el reconocimiento de material.
FINALES DE CARRERA MECÁNICOS (Limit Switch)
Con los finales de carrera se detectan determinadas posiciones de piezas de maquinaria u otros elementos de trabajo.
En la elección de estos elementos, es preciso atender especialmente el aspecto mecánico, la seguridad de contacto y la exactitud del punto de conmutación.
Figura 3.
Para el montaje y el accionamiento de los finales de carrera que hay que fijarse en las indicaciones del fabricante, siendo preciso restar el ángulo de acceso y sobre-recorrido.
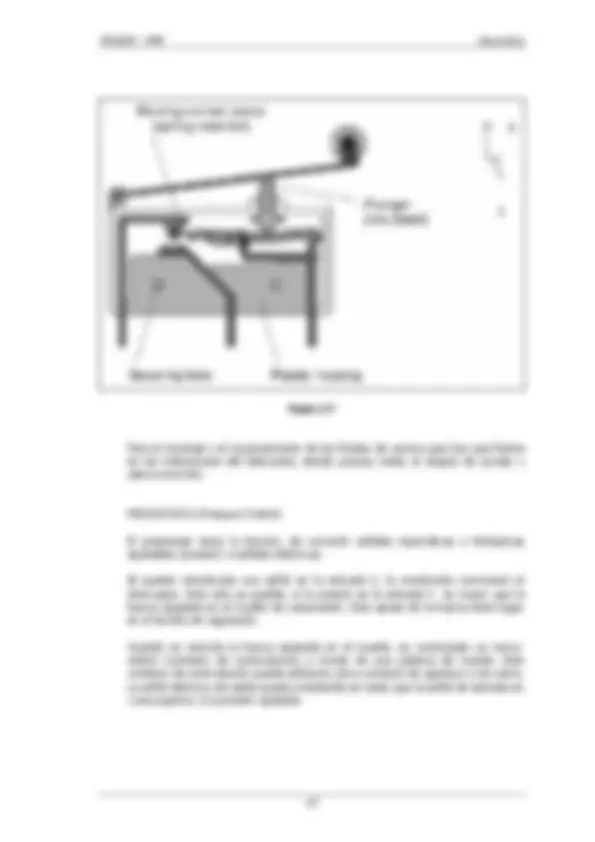
PRESOSTATO (Pressure Switch)
El presostato tiene la función, de convertir señales neumáticas o hidráulicas ajustables (presión) a señales eléctricas.
Al quedar introducida una señal en la entrada X, la membrada conmutará el interruptor. Esto sólo es posible, si la presión en la entrada X es mayor que la fuerza ajustada en el muelle de compresión. Este ajuste de la fuerza tiene lugar en el tornillo de regulación.
Cuando es vencida la fuerza ajustada en el muelle, es conmutado un micro- switch (contacto de conmutación) a través de una palanca de mando. Este contacto de conmutación puede utilizarse como contacto de apertura o de cierre. La señal eléctrica de salida queda mantenida en tanto que la señal de entrada en x sea superior a la presión ajustada.
Figura 3.
En un bloque de resina sintética están inyectados dos contactos, junto con un tubito de vidrio lleno de gas protector. Por la proximidad de un émbolo con imán permanente, los extremos de las lengüetas solapadas de contacto se atraen y conectan, y cuando se aleja el imán, se separan las lengüetas de contacto.
Nota Los cilindros con interruptores de proximidad de accionamiento magnético no deberían montarse en lugares con fuertes campos magnéticos (por ejemplo: máquinas de soldadura).
Por lo demás hay que tener presente, que no todos los cilindros son aptos para la aplicación de estos finales de carrera sin contacto.
Figura 3.
SENSORES DE PROXIMIDAD MAGNETICOS
CINTADO MAGNETICO
VASTAGO LIBRE DE INTERFERENCIAS
2. SENSORES DE PROXIMIDAD INDUCTIVOS
En la práctica a menudo se han de detectar o contar las piezas (piezas a mecanizar, etc.) movidas en máquinas o dispositivos. En la mayoría de los casos ya no pueden utilizarse para estos procesos los finales de carrera mecánicos ni tampoco los magnéticos.
En el primer caso porque ya no suele ser suficiente la fuerza de accionamiento de la pieza, para accionar los finales de carrera; en el segundo caso, porque la detección de la pieza ya no suele hallarse en el campo de acción del cilindro, para facilitar un detectado magnético. Entonces se ofrece la posibilidad de realizar esa detección sin contacto.
Figura 3.
Constitución: Los interruptores de proximidad inductivos constan de un oscilador, un disparador de nivel determinado y un amplificador.
Funcionamiento: El oscilador, con ayuda de su bobina osciladora, genera un campo alterno de alta frecuencia, que emerge en forma de cazoleta de la cara frontal del sensor. Al introducir en este campo alterno una pieza metálica, esta resta al oscilador energía debido a corrientes Foucault resultantes. Por ello desciende la tensión en el oscilador y el paso basculante siguiente dispara una señal.
Los interruptores de proximidad inductivos reaccionan sólo a metales.
Figura 3.
Pero esto significa también, que las magnitudes perturbadoras cambiantes, como polvo y virutas, pueden influirlos.
Figura 3.
LOS INTERRUPTORES DE PROXIMIDAD INDUCTIVOS SOLO REACCIONAN A
METALES Y LOS CAPACITIVOS REACCIONAN A TODOS LOS OBJETOS.
4. SENSORES FOTOELECTRÓNICO
En general son mas conocidos los sistemas fotoelectrónicos de una sola dirección.
SENSORES DE PROXIMIDAD CAPACITIVOS S1 S 2..20 mm
CUALQUIER MATERIAL, NO NECESARIAMEN TE METAL
Figura 3.
Pero también existen otros sistemas que funcionan bajo principios diferentes. Están los sistemas Fotoelectrónicos por reflexión, que tienen al emisor y al receptor dentro de un solo bloque
El rayo de luz del emisor se dirige hacia un objeto y de allí es reflejado hacia el receptor. El objeto interrumpe el camino del rayo de luz, lo que da lugar a la conmutación. Los objetos no deben ser brillantes ya que entonces el objeto mismo se convierte en reflector (por ejemplo el vástago brillante de un cilindro). La ventaja de esta disposición es su construcción compacta. El emisor y el receptor forman un mismo bloque y no requieren de una conexión que los una como en la figura anterior.
Una tercera posibilidad, el sensor difuso, para detectar la presencia de objetos es la reflexión propia de éstos, que en este vienen a hacer las veces del reflector. Por este motivo la luz es reflejada en forma directa o difusa (por ejemplo: en cajas de color claro).
Figura 3.
Relé
Figura 3.
Ejemplo de aplicación:
Hay varios tipos de reles; ejemplo: rele de retraso de tiempo y rele contador. Los reles se pueden utilizar para varias funciones de regulación, del control y el monitoreo:
- Como interfaces entre los circuitos de control y los circuitos de la carga,
- para la multiplicación de la señal,
- Para la separación de circuitos de corriente directa y circuitos de la corriente alterna,
- Para el retraso de señales de generación y convertirla, y
- Para conectar la información.
Terminales designaciones y símbolo de ci rcuito:
Dependiendo de diseño, los reles poseen números que varían de contactos normalmente cerrados, contactos normalmente abiertos, contactos de conmutadores, contactos normalmente cerrados retrasados, contactos normalmente abiertos retrasados y contactos de conmutadores retrasados. Las designaciones de los terminales de los reles son estandarizados (DIN EN 50 005, 50011-13 ):
- los reles se señalan K1, K2, K3 etc.
- las terminales de la bobina se señalan A1 y A2.
- los contactos cambiados por el reles también se señalan K1, K2 etc. en los diagramas eléctricos.
- hay además números de identificación del dos-dígitos para los contactos de conmutación. El primer dígito está para la enumeración de todos los contactos existentes (número ordinal), mientras que el segundo dígito denota el tipo de contacto (número de la función).
Función de los Números para los reles:
1 2 contacto normalmente cerrado. 3 4 contacto normalmente abierto. 5 6 contacto normalmente cerrado, de un temporizador, Timer. 7 8 contacto normalmente abierto, de un temporizador. 1 2 4 contacto de cambio del conmutador. 5 6 8 contacto de cambio del conmutador, de un temporizador.
Figura 3.
Los contactores trabajan con el mismo principio base que los relais.
Las características típicas de un contactor son:
- doble-corte (2 puntos de desconexión por contacto),
- contactos de acción-positivo y
- los compartimientos de formación de arcos cerrados (chispas se forma en compartimientos separados).
Un contactor posee varios elementos de contacto, normalmente entre 4 y 10. Hay también diversos tipos de contactores con varias combinaciones de contactos normalmente cerrados, contactos normalmente abiertos, contactos de conmutación, contactos temporizados, etc. Los contactos se dividen entre contactos principales y contactos auxiliares.
- Los contactos principales pueden interrumpir Salidas de 4 - 30 kW.
- Los contactos auxiliares se pueden utilizar para cambiar simultáneamente funciones de control y operaciones lógicas.
- Los contactores de potencia, llamados también contactores de fuerza, usan como función principal, los contactos principales.
TIPOS
POR LA ALIMENTACIÓN:
Solenoides Discretos:
Actúan de tal manera que la corredera presenta solo dos posiciones: Cuando no está energizado (posición “NORMAL”) y cuando se energiza. Es decir o no está activada o está activada. Los solenoides discretos se alimentan con tensión: 12 V, 24V, 36V, 190V Continuos 110 V, 220 V Alternos De estos valores el de 24 V Continuos es un valor común muy usado en hidráulica.
Solenoides Continuos o Proporcionales:
Actúan en forma proporcional a la señal de entrada. Por ejemplo si es alimentada con 100 mA se desplazara una distancia y si se alimenta con 200 mA se desplazara el doble. Esto quiere decir que a mayor intensidad de corriente como señal de entrada, mayor desplazamiento de la corredera. El objetivo de estos solenoides es de guardar una proporcionalidad lineal entre la señal de entrada y el desplazamiento. Comúnmente una tarjeta electrónica alimenta con corriente a estos solenoides siendo el rango de alimentación de aproximadamente: [0..2500 mA].
POR SU SELLADO DE SU VASTÁGO:
Solenoide De Pin Seco:
El elemento desplazable ubicado dentro del núcleo del solenoide está sellado con respecto a la cámara donde se encuentra el aceite hidráulico, en cambio puede presentar una extensión hacia fuera del solenoide para el accionamiento manual.
Figura 3.
Solenoide De Pin Húmedo:
El elemento desplazable ubicado dentro del núcleo del solenoide está en contacto con el aceite de las cámaras hidráulicas, pero está sellado con respecto al exterior. Mediante un dispositivo se logra accionar al elemento externamente.
Figura 3.
Figura 3.
Figura 3.
Electroválvula 2/2 vías, con accionamiento manual auxiliar.
En posición de reposo está cerrada, siendo ésta su posición base. Este elemento es una válvula de asiento, de mando directo unilateral. En la conexión 1 (P) llega el aire comprimido. La corriente de aire hacia la salida 2 (A) queda bloqueada por la armadura. Al aplicar una señal eléctrica en la bobina, se crea un campo magnético y la armadura es atraída. El aire comprimido fluye desde la entrada 1(P) hacia 2(A). Una vez anulada la señal eléctrica, la válvula vuelve a ocupar la posición básica debido al muelle de reposición.
Figura 3.
La desaireacción del conducto de aire comprimido a través del empalme 2(A) no puede tener lugar, ya que no existe un orificio de escape.
La corriente de aire desde 1(P) hacia 2(A) se puede franquear manualmente por medio de un accionamiento auxiliar. A través de una superficie existente en un tornillo, la armadura es levantada de su asiento.
Esta electroválvula 2/2 vías se aplica como órgano de cierre.
Electroválvula 3/2 vías, con accionamiento manual auxiliar.
Al aplicar una señal eléctrica a la bobina, se origina un campo magnético, que hace que la armadura se levante de su asiento, ocupando la posición superior.
El aire comprimido fluye desde la entrada 1(P) hacia la salida 2(A); el orificio de escape 3(R), existente en el tubo del imán; queda cerrado por la armadura. Al anular en la bobina el campo magnético, el muelle de reposicionamiento vuelve a empujar la armadura sobre el asiento obturador. El paso de aire comprimido de 1(P) hacia 2(A) queda bloqueado; el aire comprimido del conducto de trabajo escapa a través de la conexión 2(A) hacia 3(R) en el tubo del imán.
También aquí facilita el accionamiento auxiliar un conmutado manual de esta electroválvula 3/2 vías.
Este elemento se aplica en mandos provistos de cilindros de simple efecto, en el mando de otras válvulas y en la conexión y desconexión de aire comprimido en mandos. Se muestra a continuación una NC.
Figura 3.
Electroválvula 3/2 vías, cerrada en posición de reposo (con servopilotaje, accionamiento manual auxiliar).
Para no tener que dimensionar demasiado grandes las bobinas en la válvula, se aplican válvulas con servopilotaje neumático.
La función del elemento, mostrado abajo, es similar a la de las electroválvulas 3/2 vías precedente. La diferencia está en el accionamiento indirecto del émbolo de la válvula.
Existiendo una señal eléctrica, la armadura de la bobina magnética franqueará el paso. Por el canal de aire, existente desde la conexión 1(P) hacia la armadura y luego hacia el émbolo de la válvula, conmuta el aire comprimido al émbolo de la válvula. La función de conmutación de 1(P) hacia 2(A), es mantenida mientras existe la señal eléctrica de entrada.
En esta válvula servopilotadas es indispensable respetar la presión mínima y máxima.