¡Descarga Espais Vectorials y más Apuntes en PDF de Álgebra Lineal solo en Docsity!
TT
EMAEMA
II: EII: E
SPACIOSSPACIOS
VV
ECTORIALESECTORIALES
1.^ 1.
CONCEPTO Y EJEMPLOSCONCEPTO Y EJEMPLOS
2.^ 2.
SUBESPACIOSSUBESPACIOS
3.^ 3.
SISTEMAS DE VECTORES. CLAUSURA LINEALSISTEMAS DE VECTORES. CLAUSURA LINEAL
4.^ 4.
SISTEMAS LIBRES Y LIGADOSSISTEMAS LIBRES Y LIGADOS
5.^ 5.
BASESBASES ¾¾
DEFINICIDEFINICIÓ
ÓNN
¾¾^
COORDENADAS DE UN VECTOR EN UNA BASECOORDENADAS DE UN VECTOR EN UNA BASE ¾^ ¾
REPRESENTACIÓREPRESENTACI
ÓN MATRICIAL DE UN SISTEMA DE VECTORESN MATRICIAL DE UN SISTEMA DE VECTORES
¾^ ¾
EL PROBLEMA DEL CAMBIO DE BASEEL PROBLEMA DEL CAMBIO DE BASE ¾¾^
BASES DE SUBESPACIOS. ECUACIONES PARAMBASES DE SUBESPACIOS. ECUACIONES PARAMÉ
ÉTRICAS ETRICAS E
IMPLÍIMPL
ÍCITAS DE UNCITAS DE UN S.E.V
S.E.V.
.
6.6.^
OPERACIONES CON SUBESPACIOSOPERACIONES CON SUBESPACIOS¾ ¾
UNIÓUNI
ÓNN
¾¾^
INTERSECCIINTERSECCIÓ
ÓNN
¾¾^
SUMASUMA 99
CONCEPTOCONCEPTO 99
SUMA DIRECTASUMA DIRECTA
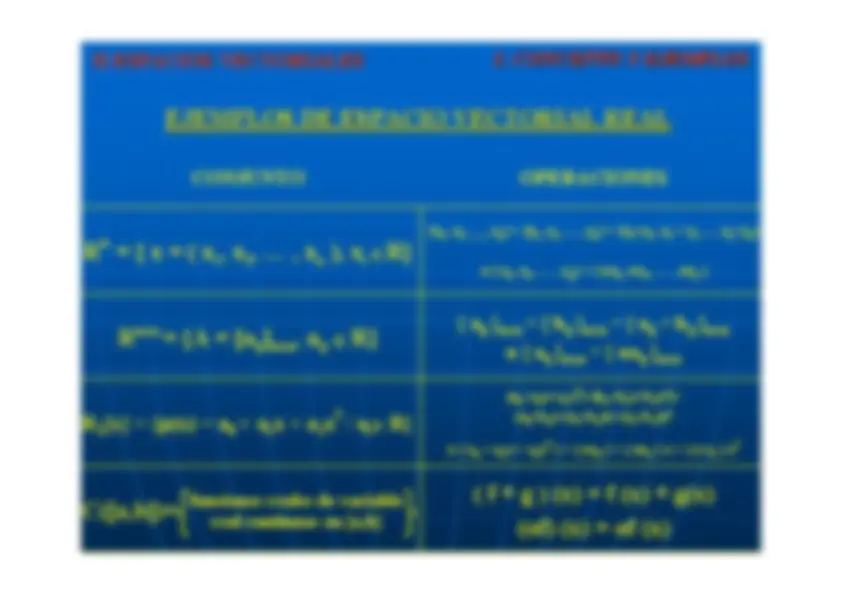
II ESPACIOS VECTORIALESII ESPACIOS VECTORIALES Un conjunto E es un espacio vectorial sobre el cuerpo K ( R o C ) si
1. CONCEPTO Y EJEMPLOS1.
CONCEPTO Y EJEMPLOS
CONCEPTO^ CONCEPTO
la operación + “suma”
de elementos de E verifica:
x + y
E
x + y = y + x
( x + y ) + z = x + ( y + z)
E / x + 0 = x
–x
E / x + ( -x ) = 0
la operación · “productopor un escalar” verifica:
α^
x^
E
α^
( x + y ) =
x +
y
(^ α
) x =
x +
x
α^ (
β^
x ) = (
) x
1 x = x
Los elementos de E se denominan vectores:
x, y, z …
Los elementos de K se denominan escalares:
α ,^
β ,^
γ^ …
x,y,z
E
x, y
E
∃ ∃
∈
∈
∀^
α,^
β^
K
∀
∈ ∈
∈
DEFINICIÓDEFINICI
ÓNN
Sea E espacio vectorial sobre K S, subconjunto no vacío de E, es un subespacio vectorial de Esi S es e.v. sobre K con las mismas leyes de E.^ CARACTERIZACICARACTERIZACIÓ
ÓNN
S, no vacío, es s.e.v. de E
αx +
y^
S^
x,y
S ;
α^
K
EJEMPLOSEJEMPLOS^9
S = { ( x
, x 1
, x 2
) / x 3
= 0; 2x 3
= 0} es s.e.v. de R 3
3
9
S = { A
nxnR
/ A = A
T^ } es s.e.v. de R
nxn
9
S = { p(x)
R^2
[x] / p’(x) = 0 } es s.e.v. de R
[x] 2
CASOS TRIVIALESCASOS TRIVIALES^ ^
{ 0 } es s.e.v. de E ^
E es s.e.v. de E
II ESPACIOS VECTORIALESII ESPACIOS VECTORIALES
2. SUBESPACIOS2. SUBESPACIOS
⇔
∈
∈^
∈
II ESPACIOS VECTORIALESII ESPACIOS VECTORIALES
3. SISTEMAS DE VECTORES.3. SISTEMAS DE VECTORES.
CLAUSURA LINEALCLAUSURA LINEAL
Un conjunto ordenado de vectores de E es un SISTEMA DE VECTORES
S = { v
, v 1
, …, v 2
}p^
E
x^
E es COMBINACIÓN LINEAL de los vectores de S si
λ^1
,^ λ
λ p
escalares tales que x =
λ^1
v^1
+^
λ^2
v^2
λ p
v^ p
λ vi
i
CLAUSURA LINEAL de S es el conjunto de todas las combinaciones
lineales de los vectores de S
< S > = {
λ vi
i^
i=1,2, …,p }
v^ i^
S
λ i^
K
PROPIEDADES DE < S >
Sean S y T sistemas de vectores de E:^ ¾
< S > es s.e.v. de E ¾ ¾ si x
< S >
< S > = < S
U
{x} >
si T
< S >
S^
< T >
⊂
p ∑= i^1
p ∑= i^1
⇒
< S > = < T >
⇒
∃
⊂ ⊂ ∈
II ESPACIOS VECTORIALESII ESPACIOS VECTORIALES
5. BASES5. BASES
DEFINICIONES^ DEFINICIONES
-^ Un sistema de vectores S es
SISTEMA GENERADOR
del e.v. E si E=
-^ E es de tipo finito si admite un sistema generador con un nº finito de vectores •^ B es una
BASE
de E si es un sistema libre y generador de E
-^ Todas las bases de un e.v. de tipo finito E tienen el mismo nº de vectores •^ Dimensión de E
≡^
nº de vectores de cualquier base
-^ Si dim E = n, se cumple que:
¾^ n vectores libres forman base ¾^ n vectores generadores de E forman base
-^ Dado un sistema libre no generador, es posible añadirle vectores hasta completaruna base •^ Los
comentarios anteriores valen para cualquier s.e.v. H
≠^
II ESPACIOS VECTORIALESII ESPACIOS VECTORIALES
5. BASES5. BASES
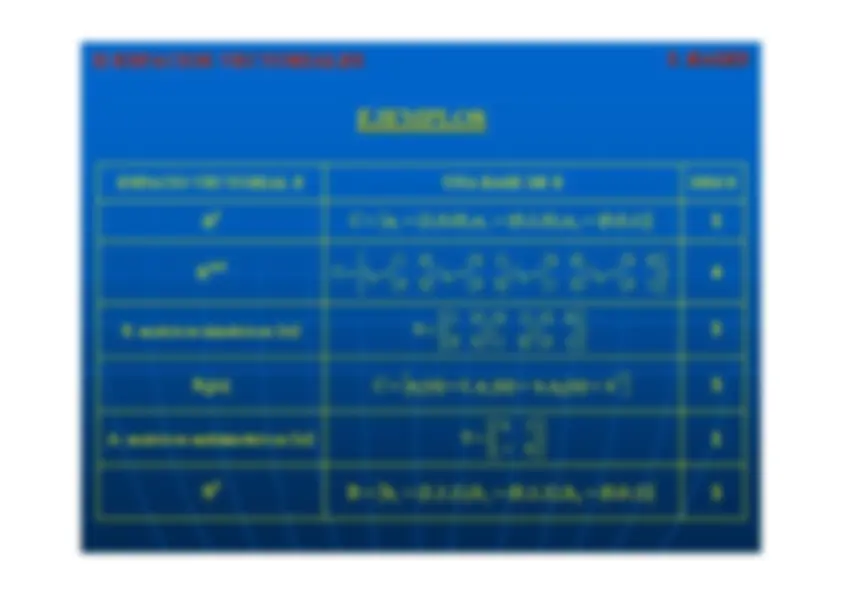
EJEMPLOS^ EJEMPLOS
(^3) R
A: matrices antisimétricas 2x
R^2
[x]
S: matrices simétricas 2x
R 2x2R 3
DIM E
UNA BASE DE E
ESPACIO VECTORIAL E
{^
}
e
e
e
C^
3
2
1
= = = = =^
1 0
0 0 I, 0 1
0 0 I, 0 0
1 0 I, 0 0
0 1 I C^
22
21
12
11
=^
1 0
0 (^0) , 0 1
1 (^0) , 0 0
0 1 B {
2 }
3
2
1
x
(x)e
x,
(x)
e1,
(x)e
C^
=^
0 (^1) -
1 0 B
{^
}
b
b
b
B^
3
2
1
II ESPACIOS VECTORIALESII ESPACIOS VECTORIALES
5. BASES5. BASES
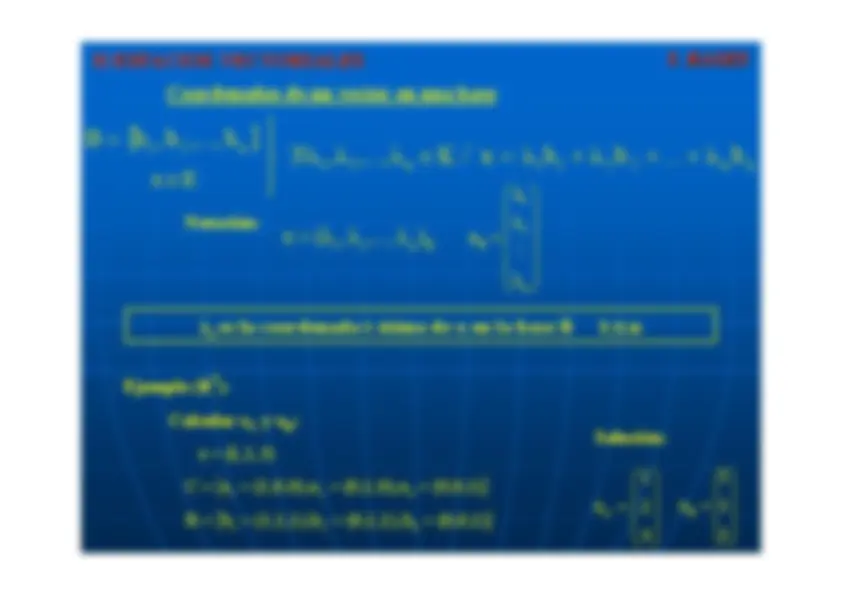
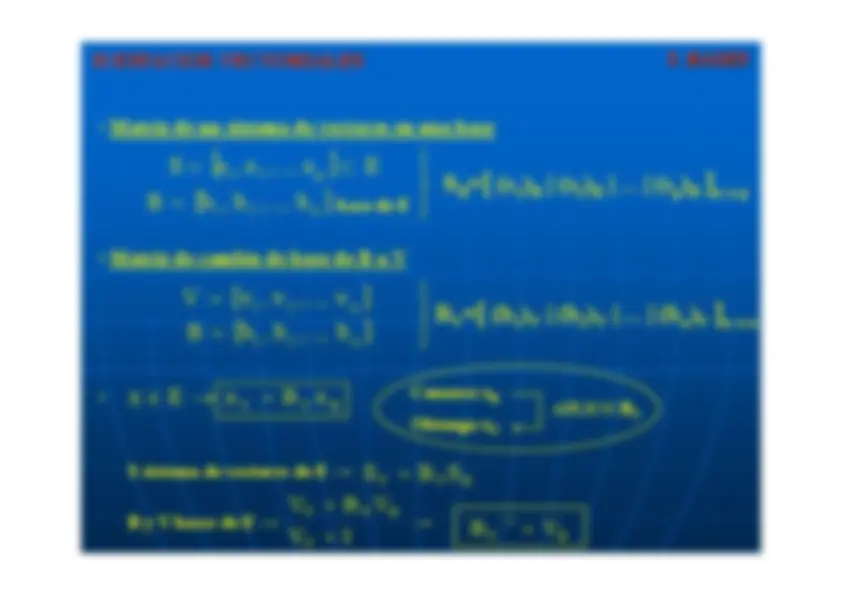
-^ Matriz de un sistema de vectores en una base
{^
}^
E
s ,..., s, s S^
p
2 1
⊂
= {^
}n
2 1
b ,..., b, b
B^
=^
base de E
SB
=[
(s
) 1 B
| (s
) 2 B
| ... | (s
)pB
]^ n x p
-^ Matriz de cambio de base de B a V
{^
}n
2 1
v ,..., v, v
V
=
{^
}n
2 1
b ,..., b, b
B^
=^
BV
=[
(b
) 1 V
| (b
) 2 V
| ... | (b
)nV
]^ n x n
B V
V^
x B
x
E x^
=
→ ∈
-^
Conozco x
B
Obtengo x
V
APLICO
B
V
S sistema de vectores de E
B V
V^
S B
S^
=
B y V bases de E
I
V
V B
V V
B V
V
= =
B
1 V^
V
B^
= −
II ESPACIOS VECTORIALESII ESPACIOS VECTORIALES
5. BASES5. BASES
EJEMPLO^ EJEMPLO
Considerar en R
4 la base canónica C={e
, e 1
, e 2
, e 3
} y la base B={b 4
=e 1
-e 1
b^2
=e
-e 2
, b 3
=e 3
-e 3
, b 4
=(1,1,1,1)}. Calcular B 4
, BC^
y las coordenadas en laB
base B de un vector genérico x=(x
, x 1
, x 2
, x 3
SOLUCIÓN
Bc
=^ [
(b
)^1 c
| (b
)^2 c
| (b
) 3 c
| (b
)^4 c
]
− − − =
1 1 0 0
1 1 1 0
1 0 1 1
1 0 0 1 4x B
B 4
B 3
B 2
B 1
I B 0 0 0 1 ) (b, 0 0 1 0 ) (b, 0 1 0 0 ) (b, 1 0 0 0 ) (b^
=
⇒ =
=
=
=
− − −
− − −
=
=
=^
−
1 2 3 4
C 1 C C B B
x x x x 1 1 1 1
3 1 1 1
2 2 2 2
1 1 1 3 1 4 X ) (B X C X
x x x x^
3x x x x^
x x x x^
x x x 3x ' x
x
x
'x
X
4 3 2 1
4 3 2 1
4 3 2 1
4 3 2 1
1 2 3 4 B
II ESPACIOS VECTORIALESII ESPACIOS VECTORIALES
6. OPERACIONES CON SUBESPACIOS6. OPERACIONES CON SUBESPACIOS
Sean E
, E 1
s.e.v. de E. Se define: 2
La UNIÓN
ó
{^
1
2 1
E
E/ x
x
E
E^
U^
} 2
E
x^ ∈
Ejemplo:
(^
) {^
}^
(^
) {^
}R y/ y0,
E, R / x x, E^
2
1
∈
=
∈
=^
subespacios de R
2
(^
) {^
} 0 / xy R yx,
E E^
2
2 1
=
∈
U^
no es s.e.v. de R
2
NOTA
: Sólo en el caso de que un s.e.v. esté incluido en elotro, la unión es s.e.v. La INTERSECCIÓN
y
{^
1
2 1
E
E/ x
x
E
E^
I^
} 2
E
x^ ∈
Ejemplo:
(^
)
{^
}^
(^
)
{^
} 0 x x / x x, x, x E, 0 x- 2x / x x, x, x E^
3 2 1 3 2 1 2 3 2 1 3 2 1 1 = + − = = +
=^
s.e.v de R
3
(^
)
{^
3 2 1 2 1
x, x, x E E^
= I^
x1+2x^
-x3 2
x^ -x2^1
+x 3
=^
}^
(^
{^
1,2,3−
La intersección de dos s.e.v. siempre es s.e.v.
II ESPACIOS VECTORIALESII ESPACIOS VECTORIALES
6. OPERACIONES CON SUBESPACIOS6. OPERACIONES CON SUBESPACIOS
La SUMA
{^
} 2 2 1 1 2 1 2 1
E
x,
E
/ x
x
x
E
E^
Ejemplo:
(^
)
{^
}^
(^
)
{^
} 1,2, u E , 1, 1, u E^
2 2
1 1
=
−
=^
subespacios de R
2
(^
)^
(^
)
{^
/ 1,2,1μ
1,-1,0λ
E E^
2 1
= +^
}^
{^
} 2 u,u 1
R μλ,
= ∈
^ La suma de s.e.v. es s.e.v. de E. ^ Si B
es base de E 1
y B 1
es base de E 2
, entonces B 2
1
B^2
es sistema
generador de E
+E 1
^ dim (E
+E 1
) = dim E 2
E^2
U
II ESPACIOS VECTORIALESII ESPACIOS VECTORIALES
6. OPERACIONES CON SUBESPACIOS6. OPERACIONES CON SUBESPACIOS
SUMA DIRECTA DE DOS S.E.V.
-^ La suma E
+ E 1
es directa ( 2
) si
dim (E
+E 1
) = dim E 2
+ dim E 1
2
2 1
E
E^
-^ Son equivalentes las afirmaciones:
La reunión de las bases de E
y E 1
es un sistema libre. 2
tales que
Si 0 = x
+x 1
2
con
entonces
x^ =x^1
2 1
E
E^
2 1
E
E
x^
∀^
2 2 1 1
E
x! , E x!
∃^
2 1
x x x^
2 1 1
E
x, E x^
{^ }^0 E E^
2 1
I
II ESPACIOS VECTORIALESII ESPACIOS VECTORIALES
6. OPERACIONES CON SUBESPACIOS6. OPERACIONES CON SUBESPACIOS
SUMA DIRECTA DE k S.E.V.
-^ La suma E
+ E 1
+ ... + E 2
k^
es directa (
) si
dim (E
+E 1
+...+E 2
) = dim Ek
+ dim E 1
+ ... + dim E 2
k k
2 1
E
E
E^
⊕^
K
-^ Son equivalentes las afirmaciones:
La reunión de las bases de cada E
, 1i
≤ i ≤
k, es un sistema libre.
tales que
(descomposición única)
Si 0=x
+x 1
+...+x 2
conk
entonces x
=x 1
=...=x 2
=0.k
(^
)k
2 1
E
E
E
x^
∀^
K
k, i (^1) , E x!
i i^
k
2 1
x
x x x^
=^
K
k, i , E x^
i i^
(^
)^
{ }^0 E
E
E
E
E^
k
(^1) i -1i
1 i^
+^
+^
K
K
I
k
2 1
E
E
E^
⊕^
K
k i 1
II ESPACIOS VECTORIALESII ESPACIOS VECTORIALES
6. OPERACIONES CON SUBESPACIOS6. OPERACIONES CON SUBESPACIOS
EJEMPLO
Probar que
y^
son
suplementarios. Descomponer el vector genérico x = (x
,x 1
,x 2
) como suma 3
de uno de E
y otro de E 1
(^ 2.
)^
(^
)
{^
}
u,
u
E^
2
1 1
=^
(^
)
{^
}
u
E^
3
2
Solución:
{^
} 3 2 1
u, u, u 0 1 1 0 0
1 0 1
1 1 1
⇒ ≠ −= −
es base de R
3
E^1
y E
son suplementarios 2
E. E E^
2 1
= ⊕ ⇒ ⇒ + +
=^
3 2 1
γ u μu λ u x
γ μ λ x
λ x
μ λ x^123
+= = −=
E^1 a^ ∈
E^2 b^ ∈
3 2 1
2 (^21)
x 2x x γ
x x μ
x λ
−=
− = =
⇒
⇒
⇒
(^
)
(^
)^
2 3 2 1
1 2 1 2 1
E x 2x
0,0,-x b
E 2x x, x, x a
∈
=
∈ −
=^
x b a^
=