



INTRODUCCIÓN AL
CONTROL NO LINEAL
Linealización de sistemas no
lineales










Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
INGENIERIA DE CONTROL AUTOMATICO II
Tipo: Resúmenes
1 / 22

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
Ecuaciones en el espacio de estados. Considere un sistema representado por un sistema de ecuaciones diferenciales ordinaras con alinealidades continuas. Las 𝑓𝑖 son funciones continuamente diferenciables en todos sus argumentos. 𝑥 ሶ 1 = 𝑓 1 (𝑥 1 … 𝑥𝑛, 𝑢 1 … 𝑢𝑟) 𝑥 ሶ 2 = 𝑓 2 (𝑥 1 … 𝑥𝑛, 𝑢 1 … 𝑢𝑟) … 𝑥 ሶ𝑛 = 𝑓𝑛(𝑥 1 … 𝑥𝑛, 𝑢 1 … 𝑢𝑟)
Suponiendo que para un vector de entrada constante 𝑢 0 el vector 𝑥 toma el valor constante 𝑥 0. Entonces resulta 𝑥 ሶ = 𝐹 𝑥 0 , 𝑢 0 = 0 Esto resulta de la definición de punto de equilibrio para sistemas en régimen permanente para una entrada constante o nula.
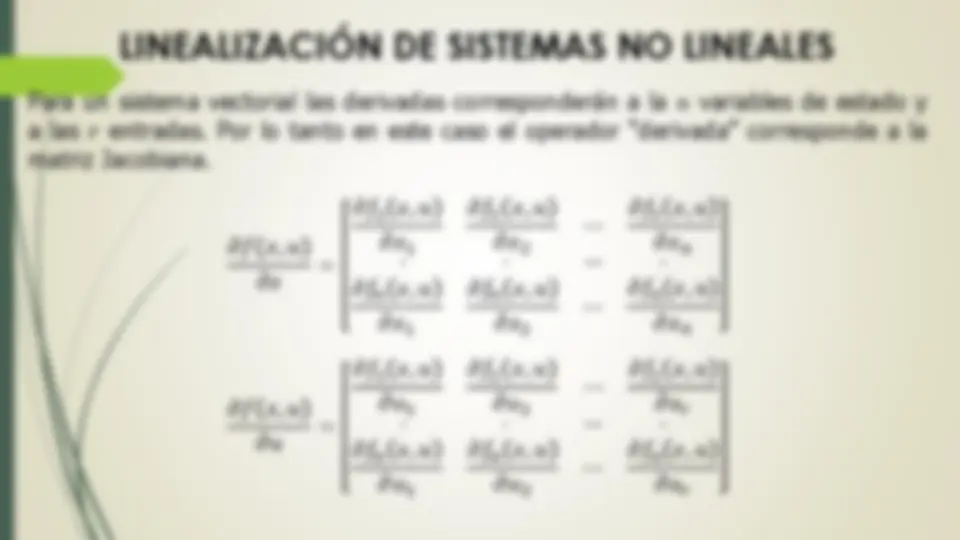
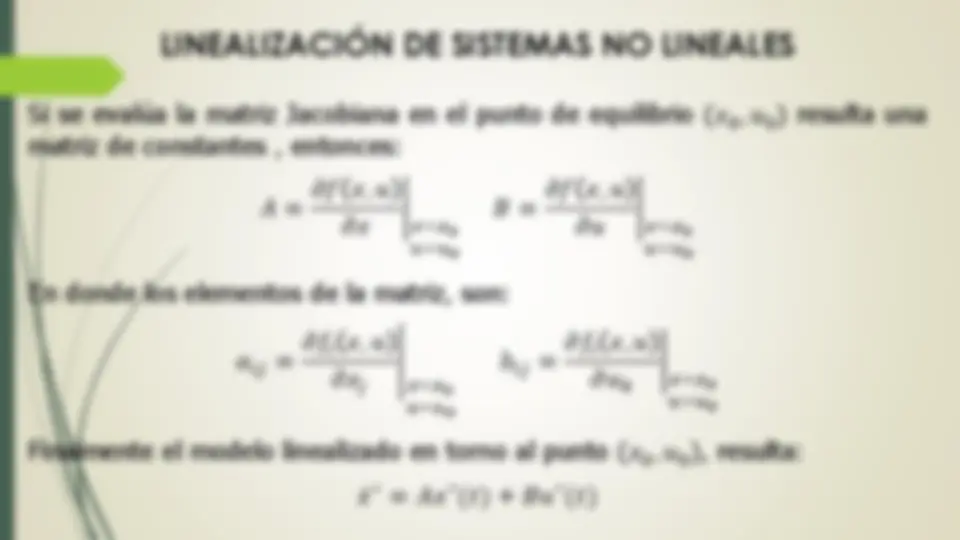
Para un sistema vectorial las derivadas corresponderán a la 𝑛 variables de estado y a las 𝑟 entradas. Por lo tanto en este caso el operador “derivada” corresponde a la matriz Jacobiana. 𝜕𝑓 𝑥, 𝑢 𝜕𝑥
0
0
𝑢=𝑢 0
𝑢=𝑢 0
𝑖𝑗
0 𝑢=𝑢 0
𝑖𝑗
𝑢=𝑢 0
0
0
∗
∗
∗
Considerando que el caudal neto de líquido que ingresa o sale del tanque tiene que ser igual a la variación de su volumen en el mismo, se puede plantear la siguiente ecuación: 𝑑𝑉(𝑡) 𝑑𝑡
El volumen 𝑉 es función de la altura 𝑥, siendo 𝑥 función de 𝑡. Para simplificar las expresiones se mantendrá implícita esta circunstancia. Relacionando ahora 𝑉 con 𝑥 se halla el modelo buscado: 𝑉 𝑥 = න 0 𝑥 𝐴 𝑥 𝑑𝑥 𝑦 𝐴 𝑥 =
2 (𝑥) 𝑑 𝑥 = 𝑎 + 𝑏𝑥 𝑐𝑜𝑛 𝑎 = 𝑑𝐼 𝑦 𝑏 =
siendo 𝐴(𝑥) y 𝑑(𝑥) el área de la sección transversal y el diámetro a la altura 𝑥, respectivamente.
2
2
0 𝑥
2
3
2
2
2
3
2
10
− 3
3
0
∗
∗
1 ∗
∗
∗
− 3
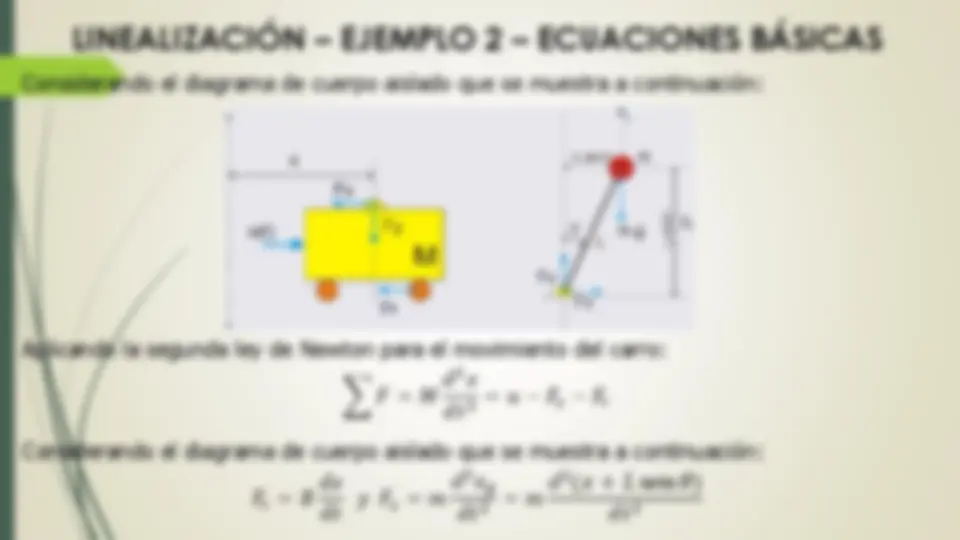
El péndulo invertido es conocido por ser uno de los problemas más importantes y clásicos de la teoría de control. Se trata de un control inestable y no lineal. A menudo, es utilizado como ejemplo académico, principalmente por ser un sistema de control accesible, y por otro lado, permite mostrar las principales diferencias de control de lazo abierto y de su estabilización a lazo cerrado. Se supone que la varilla no tiene masa, que la masa del carro es 𝑀 y la masa en el extremo superior del péndulo invertido es 𝑚. Hay una fuerza externa, 𝑢(𝑡), sobre el carrito en la dirección 𝑥 , y una fuerza de gravedad que actúa sobre la masa del péndulo en todo momento. El sistema de coordenadas elegido se define en la figura, donde 𝑥(𝑡) representa la posición del carro y 𝜃(𝑡) es el ángulo de inclinación que se mide respecto de la dirección vertical.
Considerando el diagrama de cuerpo aislado que se muestra a continuación: Aplicando la segunda ley de Newton para el movimiento del carro: 𝐹 = 𝑀 𝑑 2 𝑥 𝑑𝑡 2 = 𝑢 − 𝐹𝑥 − 𝐹𝑟 Considerando el diagrama de cuerpo aislado que se muestra a continuación: 𝐹𝑟 = 𝐵 𝑑𝑥 𝑑𝑡 𝑦 𝐹𝑥 = 𝑚 𝑑 2 𝑥𝑔 𝑑𝑡 2 = 𝑚 𝑑 2 (𝑥 + 𝐿 sen 𝜃) 𝑑𝑡 2
𝑀 𝑑 2 𝑥 𝑑𝑡 2
2
2
2
2
2
2
𝑦
𝑥
2
2
2
2
Despejando se obtiene: 𝜃^ ሷ = 𝑚𝐿 cos 𝜃 𝐵 𝑥ሶ − 𝑚𝐿 𝜃ሶ 2 sen 𝜃 + 𝑢 − 𝑔(𝑀 + 𝑚) sen 𝜃 𝑚 2 𝐿 2 cos 2 𝜃 − 𝐽 + 𝑚𝐿 2 𝑀 + 𝑚 Reemplazando en la ecuación de 𝑥ሷ 𝑥 ሷ = 𝑚 2 𝐿 2 𝑔 sen 𝜃 cos 𝜃 − 𝐽 + 𝑚𝐿 2 𝑚𝐿 𝜃ሶ 2 sen 𝜃 − 𝐵 𝑥ሶ + 𝑢 𝑚 2 𝐿 2 cos 2 𝜃 − 𝐽 + 𝑚𝐿 2 𝑀 + 𝑚 Definiendo como variables de estado 𝑥 1 = 𝑥, 𝑥 2 = 𝑥ሶ, 𝑥 3 = 𝜃 𝑦 𝑥 4 = 𝜃ሶ 𝑥 ሶ 1 = 𝑥 2 𝑥 ሶ 2 =
2 𝐿 2 𝑔 sen 𝑥 3 cos 𝑥 3 − 𝐽 + 𝑚𝐿 2 𝑚𝐿𝑥 4 2 sen 𝑥 3 − 𝐵𝑥 2 + 𝑢 𝑚 2 𝐿 2 cos 2 𝑥 3 − 𝐽 + 𝑚𝐿 2 𝑀 + 𝑚 𝑥 ሶ 3 = 𝑥 4 𝑥 ሶ 4 = 𝑚𝐿 cos 𝑥 3 𝐵𝑥 2 − 𝑚𝐿
4 2 2 sen 𝑥 3 + 𝑢 − 𝑔(𝑀 + 𝑚) sen 𝑥 3 𝑚 2 𝐿 2 cos 2 𝑥 3 − 𝐽 + 𝑚𝐿 2 𝑀 + 𝑚
1 ∗
2 ∗
2 ∗
2
2
2 ∗
2
2
2
3 ∗
2
2
∗
∗
∗
4 ∗
2
2 ∗
2
3 ∗
2
∗