



INTRODUCCIÓN AL
CONTROL NO LINEAL










Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
INGENIERIA DE CONTROL AUTOMATICO II
Tipo: Resúmenes
1 / 33

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
Una primera definición de control no lineal: Definición (Sistema No Lineal) Un sistema no lineal es aquél que no verifica el principio de superposición.
Mejora de los sistemas de control. Los controladores no lineales pueden manejar no linealidades en un amplio rango de operación del sistema. En estos casos, un controlador no lineal puede mejorar notablemente el desempeño respecto de un controlador de tipo lineal Análisis de no linealidades severas. Una suposición del control lineal es que el modelo es linealizable. Sin embargo existen no linealidades cuya naturaleza discontinua no permite la aproximación lineal. Ejemplos: equilibrios múltiples, ciclos límite, bifurcaciones, corrimiento de frecuencias, caos, etc.
Incertidumbre en el modelo. Cuando se diseñan sistemas de control basados en modelos lineales se asume que los parámetros del modelo son suficientemente conocidos. Sin embargo, a veces esto no ocurre, lo cual puede deberse a variaciones lentas o abruptas de esos parámetros. En estos casos pueden incorporarse intencionalmente no linealidades al sistema de control a fin de que esas incertidumbres sean bien toleradas. Ejemplos: sistemas de control robusto y adaptables.
CLASIFICACIÓN DE SISTEMAS NO LINEALES Las no linealidades pueden clasificarse como: naturales o inherentes : están naturalmente incluidas en el sistema, como las fuerzas centrípetas, fricción de Coulomb, etc. Usualmente tienen efectos indeseables y los sistemas de control deben compensarlas. artificiales o intencionales : son introducidas intencionalmente por el diseñador, como las leyes de control adaptable. discontinuas : no pueden ser localmente aproximadas por funciones lineales, ej. el juego muerto, la histéresis, la fricción estática, etc. continuas : pueden ser localmente linealizadas. estáticas : representables por ecuaciones algebraicas (o por curvas que las describen) dinámicas: representables por ecuaciones diferenciales, o ecuaciones en diferencias.
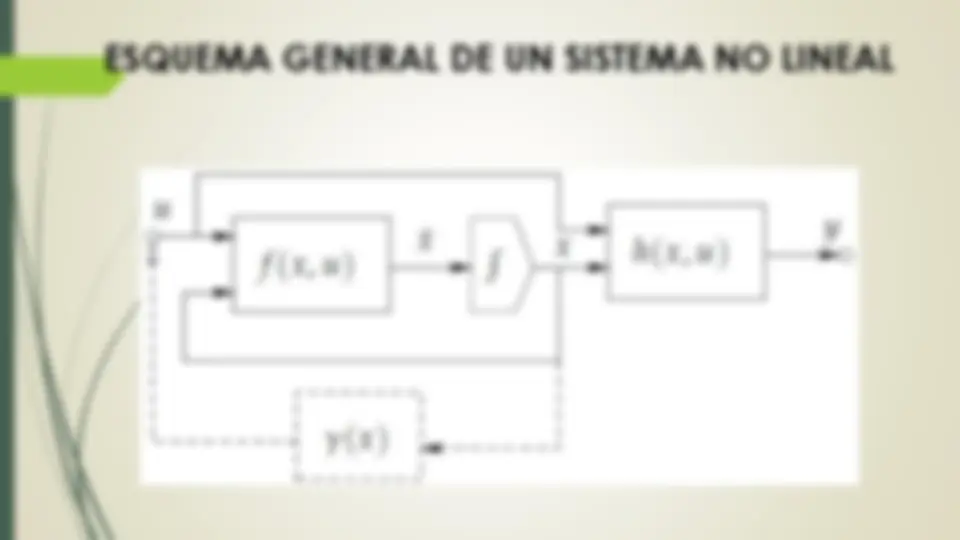
PRELIMINARES Se considerarán sistemas dinámicos modelados por un número finito de ecuaciones diferenciales ordinarias de primer orden acopladas entre sí, que representaremos en forma compacta como 𝑥 ሶ = 𝑓(𝑥, 𝑢) 𝑦 = ℎ 𝑥, 𝑢 , ( 1 ) donde 𝑥 ∈ ℝ 𝑛 es el vector de estado y 𝑢 ∈ ℝ 𝑝 es el vector de entradas (de control). La segunda ecuación es una ecuación de salida, donde 𝑦 ∈ ℝ 𝑚 es un vector de variables de interés, por ejemplo variables físicamente medibles o variables que deseamos se comporten de alguna forma especial. Todos estos vectores son funciones de 𝑡, y se denominará a este sistema, Sistema de Control (SC). Muchas veces la entrada 𝑢 no aparece explícitamente en ( 1 ), ya sea porque la entrada es cero (en cuyo caso hablaremos de Sistema(𝑺)), ya sea porque fue especificada como una función del estado 𝑢 = 𝛾(𝑥) - control por realimentación. En este caso la ecuación de estado es simplemente 𝑥 ሶ = 𝑓 𝑥 , ( 2 )
PRELIMINARES Se considerarán sistemas estacionarios o invariantes en el tiempo, es decir que su comportamiento es invariante al corrimiento del origen temporal 1 . Un concepto importante relacionado con la ecuación de estado ( 2 ) es el de Equilibrio: Punto de equilibrio (PE) Un punto 𝑥 ∗ en el espacio de estado es un punto de equilibrio (PE) del Sistema ( S ) ( 2 ) si tiene la propiedad de que cuando el estado inicial del sistema es 𝑥 ∗ , el estado permanece en 𝑥 ∗ para todo tiempo futuro. Un conjunto Ω ⊆ ℝ 𝑛 es un conjunto de equilibrio si cada punto de Ω es un punto de equilibrio. Los PE del Sistema ( S ) ( 2 ) están dados por las raíces de 𝑓(𝑥), es decir, por las soluciones de la ecuación 𝑓(𝑥) = 0. La ecuación anterior, junto a ( 2 ), implican que la derivada respecto al tiempo de 𝑥 es nula, lo que equivale a decir que el vector de estados permanece constante en el tiempo. (^1) Nótese que lo invariante es la ley, el comportamiento; no las variables.
PRELIMINARES En el caso de sistemas no lineales los PE pueden ser múltiples y aislados, es decir no tienen otros PE en la vecindad, o puede existir un continuo de PE’s. Cuando el sistema es lineal, ( S ) tiene la forma conocida 𝑥 ሶ = 𝐴𝑥, y si A es invertible, tiene un único PE aislado, dado por 𝑥 = 0. Comentario Las técnicas de análisis y control lineales son bien conocidas ⇒ es conveniente comenzar linealizando el sistema no lineal alrededor de algún punto de equilibrio y estudiar el sistema lineal resultante. Sin embargo, esto no es siempre suficiente debido básicamente a dos razones: la linealización sólo predice el comportamiento local; la dinámica de un sistema no lineal es mucho más rica que la de un sistema lineal debido a la presencia de fenómenos no lineales como: escape en tiempo finito, múltiples PE aislados, ciclos límite, oscilaciones sub-armónicas, armónicas o casi-periódicas, caos, etc.
Usando la segunda ley de Newton podemos escribir la ecuación de movimiento en la dirección tangencial: 𝑚𝑙 𝜃ሷ = −𝑚𝑔 sin(𝜃) − 𝑘𝑙 𝜃ሶ, donde 𝑚 es la masa de la bola, 𝑙 es la longitud del brazo, 𝜃 es el ángulo entre la vertical y el brazo, 𝑔 es la aceleración de la gravedad, y 𝑘 es el coeficiente de fricción. Tomando como variables de estado 𝑥 1 = 𝜃 y 𝑥 2 = ሶ 𝜃 podemos escribir las ecuaciones de estado 𝑥 ሶ 1 = 𝑥 2 , 𝑥 ሶ 2 = − 𝑔 𝑙 sin(𝑥 1 ) − 𝑘 𝑚 𝑥 2
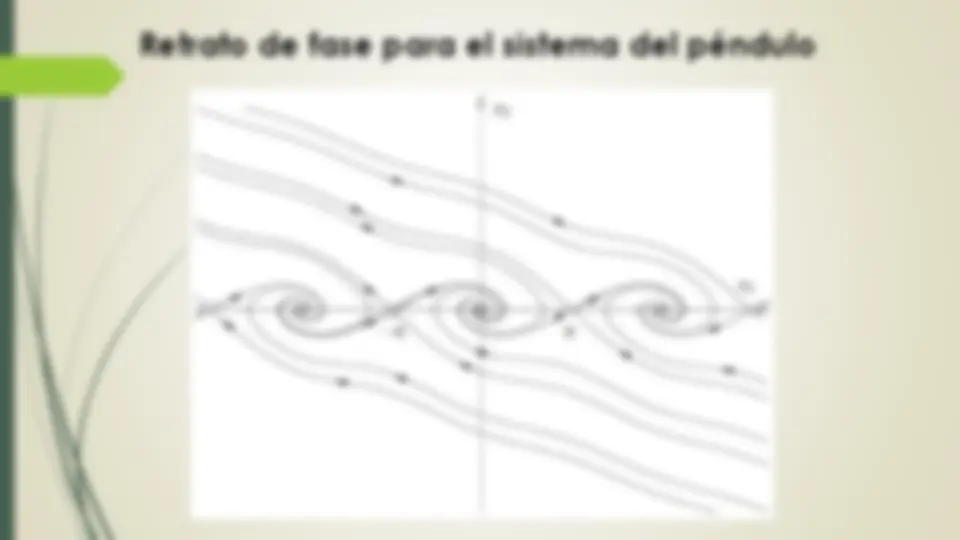
Los PE (haciendo 𝑥ሶ 1 = 𝑥ሶ 2 = 0 ) están dados por (𝑛𝜋, 0 ), con 𝑛 = 0 , ± 1 , ± 2 ,··· Obviamente sólo los PE ( 0 , 0 ) y (𝜋, 0 ) son no triviales, ya que el resto son repeticiones de éstos. Físicamente podemos ver que el PE en ( 0 , 0 ) es estable mientras que el PE en (𝜋, 0 ) es inestable. Otra versión de la ecuación del péndulo consiste en agregarle una entrada de control, por ejemplo aplicando una cupla 𝑇: 𝑥 ሶ 1 = 𝑥 2 , 𝑥 ሶ 2 = − 𝑔 𝑙 sin 𝑥 1 − 𝑘 𝑚 𝑥 2
1 𝑚𝑙 2 𝑇. Varios sistemas físicos pueden describirse con ecuaciones similares a las del péndulo.
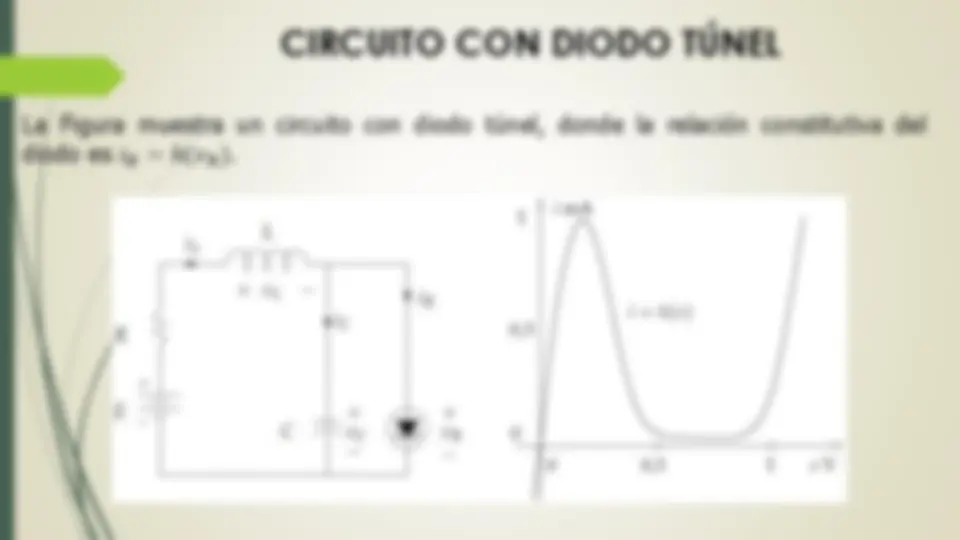
CIRCUITO CON DIODO TÚNEL Los PE son las raíces de la ecuación de estado, que surgen de hacer cero las derivadas de los estados: 𝑥 2
1 𝐸 = 𝑥 1
2
de modo que se llega a la ecuación ℎ(𝑥 1
1
Según el valor de E/R puede haber uno o tres PE, como se ve en la Figura de la siguiente diapositiva
CIRCUITO CON DIODO TÚNEL
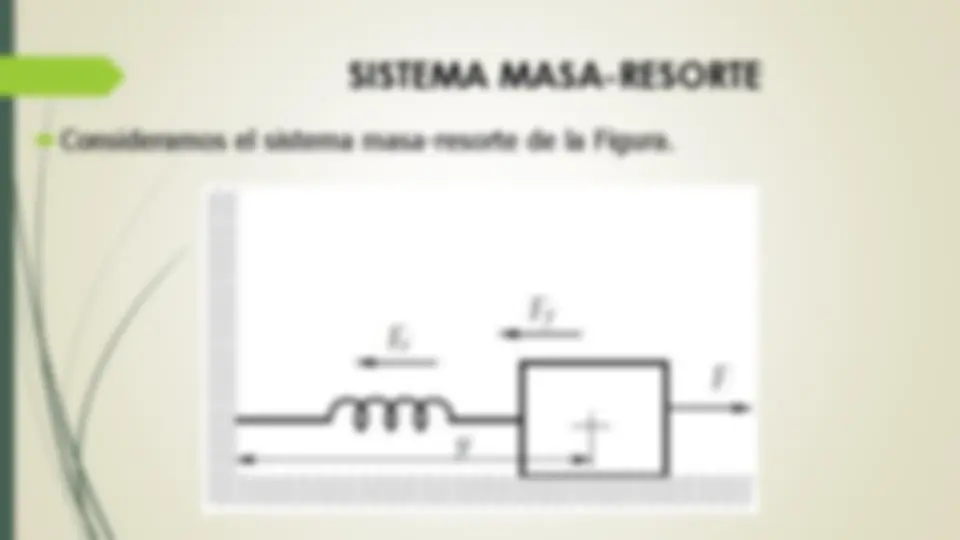
SISTEMA MASA-RESORTE Usando la ley de Newton: 𝑚 𝑦ሷ + 𝐹𝑓 + 𝐹𝑟 = 𝐹, donde 𝐹 𝑓 es una fuerza resistiva de fricción, 𝐹 𝑟 es la fuerza de recuperación del resorte, y 𝐹 es una fuerza externa, a nuestra disposición. Se asume que 𝐹 𝑟 es sólo función del desplazamiento 𝑦, es decir 𝐹 𝑟 = 𝑔(𝑦), con 𝑔( 0 ) = 0 (es decir, sin desplazamiento no hay fuerza).
SISTEMA MASA-RESORTE Para desplazamientos pequeños , 𝐹𝑟 puede modelarse como la relación lineal 𝑔(𝑦) = 𝑘𝑦. Para grandes desplazamientos, la fuerza de recuperación puede depender no linealmente de 𝑦. Por ejemplo, hay resortes suaves donde 𝐹𝑟 = 𝑔(𝑦) = 𝑘( 1 − 𝑎 2 𝑦 2 )𝑦, |𝑎𝑦| < 1 , o resortes duros donde 𝐹𝑟 = 𝑔(𝑦) = 𝑘( 1 + 𝑎 2 𝑦 2 )𝑦, Po otro lado, un ejemplo de fuerza de fricción 𝐹𝑓 es la fuerza viscosa o amortiguamiento del aire, que suele modelarse como una función no lineal de la velocidad: 𝐹 𝑣 = ℎ( 𝑦ሶ), con ℎ( 0 ) = 0.