



INTRODUCCIÓN AL CONTROL
ÓPTIMO CUADRÁTICO











Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
INGENIERIA DE CONTROL AUTOMATICO II
Tipo: Resúmenes
1 / 30

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
El traslado de las especificaciones de diseño (sobreimpulso, etc.), no siempre es directo, particularmente para sistemas complejos; ¿cuál es la mejor configuración de polos para las especificaciones dadas? En sistemas MIMO las ganancias de realimentación de estados que logran una configuración de polos dada, no es única. ¿Cuál es la mejor K para una configuración de polos dada?. Los autovalores del observador deberían escogerse más rápidos que los del sistema de lazo cerrado. ¿Hay algún otro criterio disponible para ayudar a decidirse por una configuración o por otra?.
ÍNDICE DE FUNCIONAMIENTO O DESEMPEÑO Medida cuantitativa del funcionamiento de un sistema. Debe brindar selectividad, debe ser un número positivo o cero. Debe ser función de los parámetros del sistema Fácilmente calculable analíticamente y por computadora. El cálculo del índice de desempeño, parte de la definición del error e(t). Necesario para obtener una medida cuantitativa: Del funcionamiento de un sistema para la operación de sistemas de control moderno adaptables. Para la optimización de parámetros automáticos en un sistema de control. Para el diseño de sistemas óptimos.
ÍNDICES DE FUNCIONAMIENTO CLÁSICOS Criterio de la integral del error cuadrático (ISE). 𝐼 1 = න 0 ∞ 𝑒 2 𝑡 𝑑𝑡 Se adapta para mediciones prácticas. Conveniente para el análisis y cálculo. Criterio de la integral de la magnitud absoluta del error (IAE) 𝐼 2 = න 0 ∞ 𝑒(𝑡) 𝑑𝑡 Útil para simulación en computador. Reduce la contribución del gran error inicial.
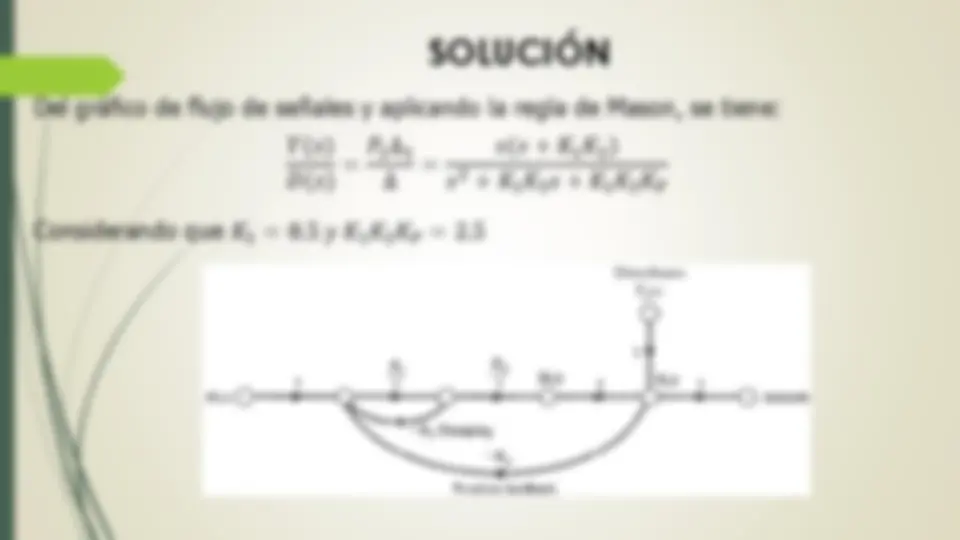
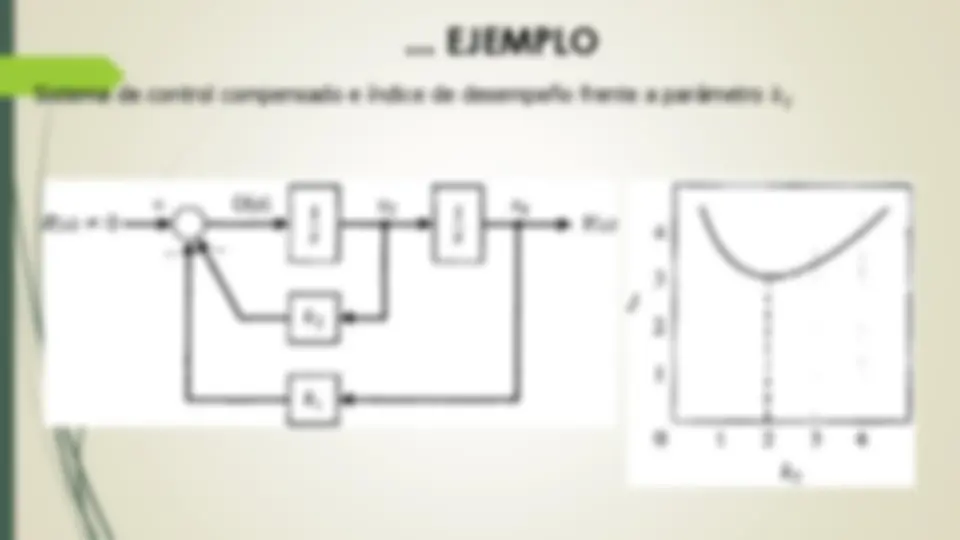
En la figura se muestra un sistema de control de posición de un telescopio espacial. Se desea seleccionar K 3 con el objeto de minimizar el efecto de la perturbación D(s). En este caso, la perturbación equivale a un error de posición inicial.
Del gráfico de flujo de señales y aplicando la regla de Mason, se tiene: 𝑌(𝑠) 𝐷(𝑠)
2
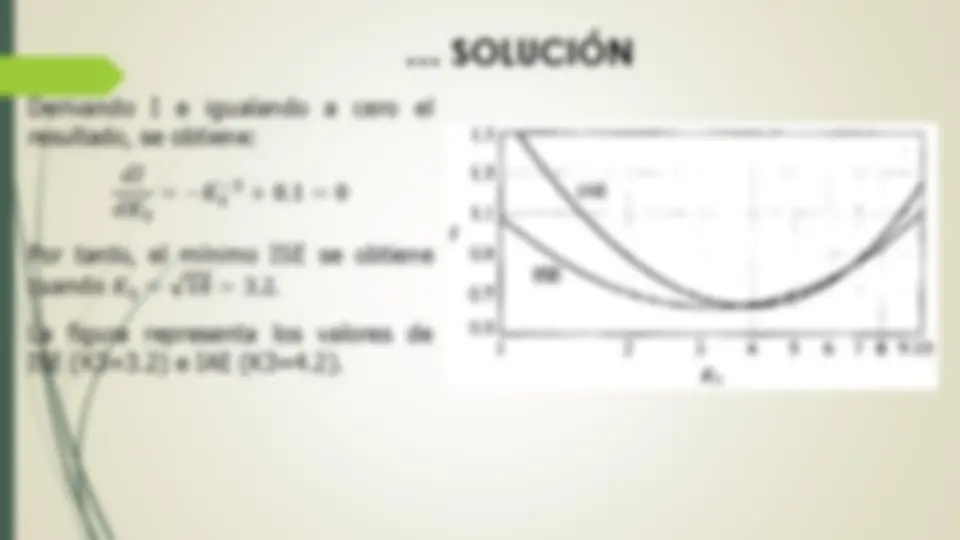
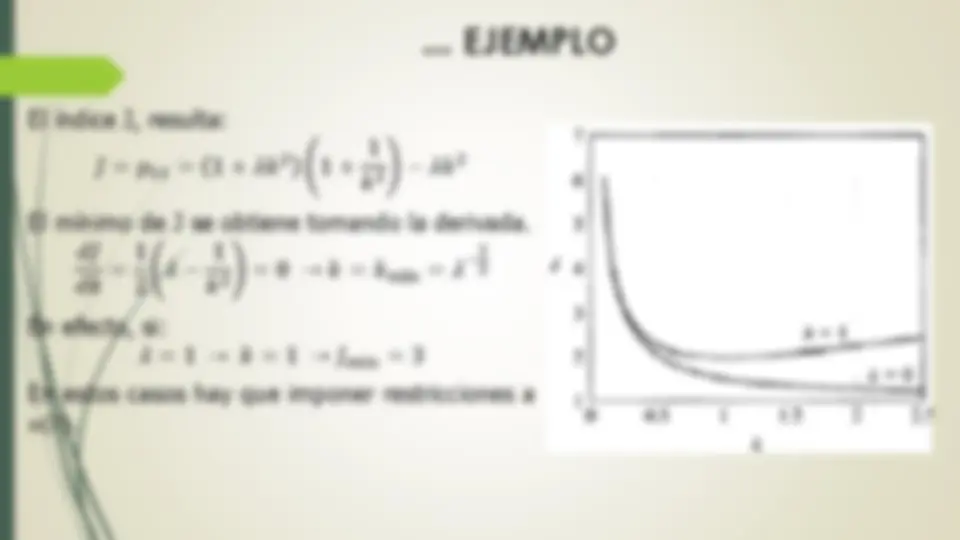
Derivando I e igualando a cero el resultado, se obtiene: 𝑑𝐼 𝑑𝐾 3
3 − 2
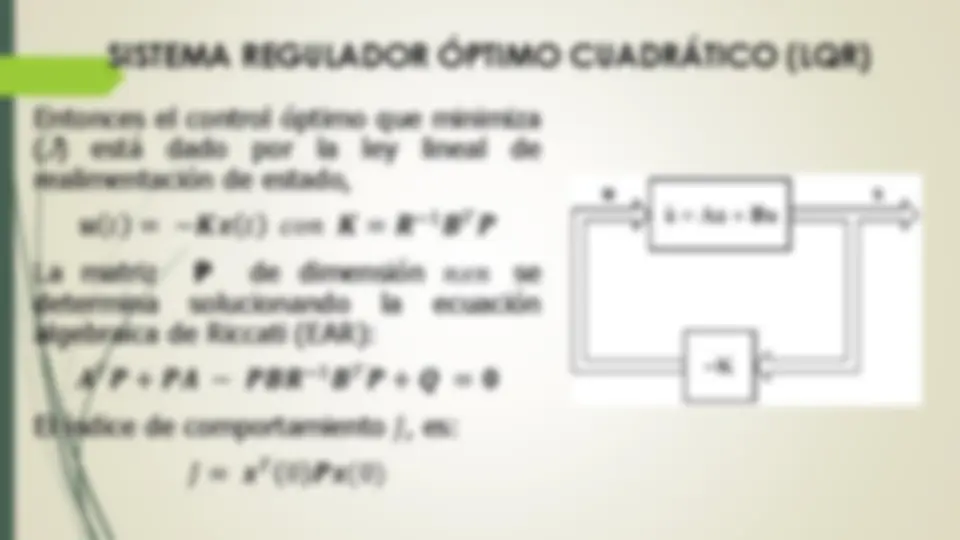
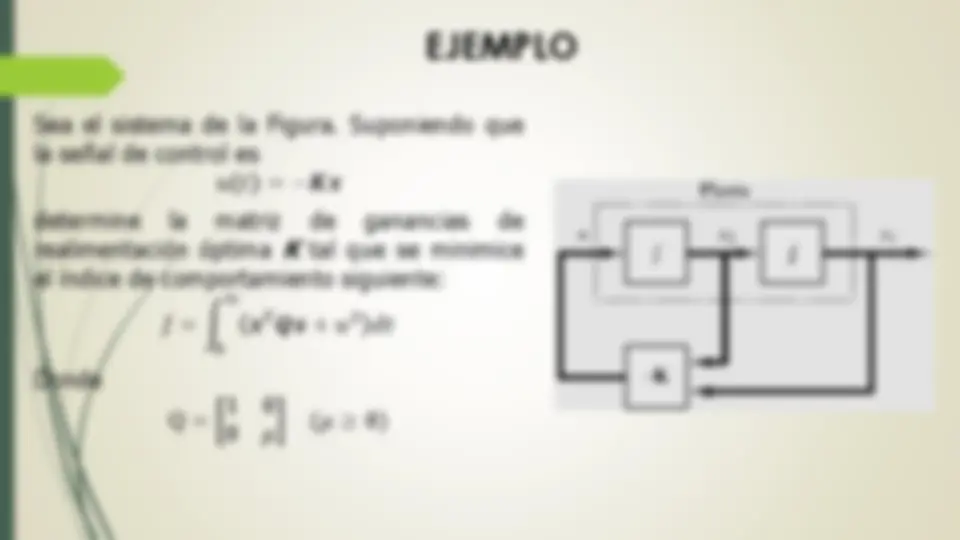
SISTEMAS DE CONTROL ÓPTIMO Considerando el sistema: se puede representar mediante la ecuación diferencial vectorial: 𝒙^ ሶ = 𝑨𝒙 + 𝑩𝒖 ( 1 ) un regulador de retroalimentación de control de modo que: 𝒖 = −𝑲𝒙 ( 2 ) Entonces: 𝒙 ሶ = 𝑨𝒙 − 𝑩𝑲𝒙 = (𝑨 − 𝑩𝑲)𝒙 = 𝑯𝒙 ( 3 )
Considere el sistema cuya ecuación diferencial vectorial es: 𝒙 ሶ =
Se escoge un sistema de control por realimentación de forma que: 𝑢 𝑡 = −𝑘 1 𝑥 1 − 𝑘 2 𝑥 2 Si k 1 = 1 , además 𝒙 𝑇 0 = 1 1. Determine un valor adecuado para k 2 de forma que minimice el índice de desempeño y la sensibilidad del sistema óptimo. Solución : De forma matricial, se tiene: 𝒙 ሶ = 𝑯𝒙 =
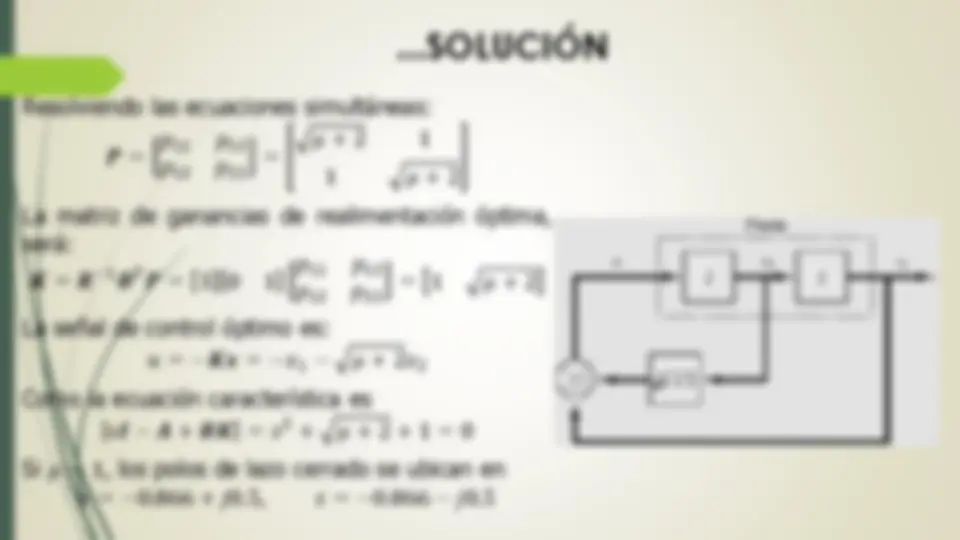
Entonces: 𝑯 𝑇 𝑷 + 𝑷𝑯 = −𝑰 →
Efectuando la multiplicación, suma de matrices y resolviendo las ecuaciones simultáneas; se tiene: 𝑝 12 = 1 2 , 𝑝 22 = 1 𝑘 2 , 𝑝 11 = 𝑘 2 2
DISEÑO CONSIDERANDO LA MAGNITUD DE LA SEÑAL DE CONTROL O GASTO ENERGÉTICO.
0 ∞
𝑇
𝑇
La ecuación del sistema se puede escribir como: 𝒙^ ሶ = 𝑨𝒙 + 𝑩𝒖 = 𝑯𝒙
𝑇
valoración diferente de cero. En este caso se necesita de:
𝑇
𝑇
Considere el sistema cuya ecuación diferencial vectorial es: 𝒙 ሶ =
Se escoge un sistema de control por realimentación de forma que: 𝒖 = −𝑲𝒙 = −𝑘𝑥 1 − 𝑘𝑥 2 = −𝑘𝒙 Si 𝜆 ≠ 0. Determine un valor adecuado para 𝑘 de forma que minimice el índice de desempeño, sabiendo que 𝑥 𝑇 0 = 1 0. Solución : La matriz 𝑄, es: 𝑸 = 𝑰 + 𝜆𝑲 𝑇 𝑲 =
2 𝜆𝑘 2 𝜆𝑘 2 1 + 𝜆𝑘 2
Los coeficientes de la matriz P, se calculan desde: (𝑯 𝑇 𝑷 + 𝑷𝑯) = −𝑸
Se asume que el sistema esta en equilibrio y se desea mantener en equilibrio aun en presencia de perturbaciones. Una ventaja de usar el esquema LQR es que el sistema diseñado será estable, excepto si el sistema no es controlable. La ventaja respecto al método de asignación de polos es que el esquema LQR proporciona un procedimiento sistemático de calcular la matriz de ganancia de realimentación de estado. Al diseñar este tipo de sistemas de desempeño cuadrático se necesita resolver las ecuaciones de Riccati. MATLAB tiene un comando lqr que proporciona la solución a la ecuación de Riccati en tiempo continuo y determina la matriz de ganancias de realimentación óptima.
OBSERVACIÓN: MATRIZ DEFINIDA POSITIVA
𝑛𝑥𝑛
𝑇
𝑛
𝑇
𝑛
2
2
2
2
2