


Regresión múltiple
Demostraciones
Elisa Mª Molanes López









Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Asignatura: Econometría, Profesor: , Carrera: Economía, Universidad: UNED
Tipo: Apuntes
1 / 24

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
Elisa Mª Molanes López
El modelo de regresión múltiple
El modelo que se plantea en regresión múltiple es el siguiente:donde
son las variables independientes o explicativas.
La variable respuesta depende de las variables explicativas y de unacomponente de error que se distribuye según una normal:El ajuste del modelo se realiza por el método de máxima verosimilitud o elmétodo de mínimos cuadrados. En el caso de distribución normal de errores,ambos métodos coinciden, como ya se vió en regresión simple.
x
1
, x
2
,... , x
k
u
i
=
N
(
,
σ
2
)
Notación
ˆy
1
ˆy
2 ...
ˆy
n
y
1
y
2 ...
y
n
e
e
1
e
2 ...
e
n
X
es la denominada matriz de diseño, de dimensión
n
x
(k+1)
x
11
x
21
x
k
1
x
12
x
22
x
k
2
x
1
n
x
2
n
x
kn
1
2
k
, siendo
j
x
j
1
x
j
2
x
jn
β
β
0
β
1 ...
β
k
β
β
0
β
1 ... ˆ β
k
Forma matricial del modelo
La expresión matricial del modelo de regresión múltiple es la siguiente:El modelo estimado también puede expresarse en forma matricial:
Y
=
X
β
U
ˆ
Y
=
X
ˆ
β
Y
−
ˆ
Y
=
e
∂β
=
−
X
Y
−
X
Y
X
X
)
β
→
X
Y
= (
X
X
)
β
Ajuste por mínimos cuadrados
Al igual que en regresión simple, la estrategia que seguimos paracalcular el mínimo de
S
es:
S
con respecto a los parámetros,
k+
parámetros que queremos estimar).
En términos matriciales, resulta que:
Así que,
ˆ β
= (
X
T
X
)
−
1
X
T
Y
Es una matriz simétrica,de dimensión
(k+1)x(k+1)
Su rango debe ser máximopara ser invertible, es decir:
rango
T
k
Denota traspuesta
de una matriz
Teniendo en cuenta que:
∂
x
T
a
∂
a
x
∂
a
T
Xa
∂
a
Xa
Que el
es equivalente a pedir que ninguna de las
Ajuste por mínimos cuadradosvariables explicativas se pueda escribir como combinación lineal de las demás.
rango
T
k
Son las ecuaciones normales de la regresión
De ellas se deduce que:
Los errores de predicciónsuman cero
P
e
= 0
La covarianza entre los erroresde predicción y cada variableexplicativa es cero
P
n i
=
e
i
x
ij
= 0
, j
= 1
,... , k
∂β
=
−
2
X
Y
X
X
)
β
=
~
0
Relaciones entre las variables
ˆ β
= (
X
T
X
)
−
1
X
T
Y
ˆ Y
=
X
ˆ β
=
X
(
X
T
X
)
−
1
X
T
Y
=
HY
A esta matriz le vamos a llamar
H
y se le conoce con el nombre de matriz de
proyección.Este nombre quedará justificado una vez veamos la interpretación geométricade la estimación.
Las propiedades de la matriz
H
son las siguientes:
HH
=
H
H
T
=
H
X
:
(k+1)
Relaciones entre las variables
Es sencillo ver que el error de predicción se puede escribir en formamatricial en términos de
H
e
La expresión
, indica que la matriz
(la cual es idempotente),
transforma el vector de observaciones
en el vector de valores ajustados
(o predicciones)
ˆ Y
=
HY
Una matriz idempotente realiza una proyección, por lo que la regresión va aser una proyección.Para entender mejor cómo es esa proyección, vamos a estudiar lasrelaciones existentes entre
e
.
e, Y
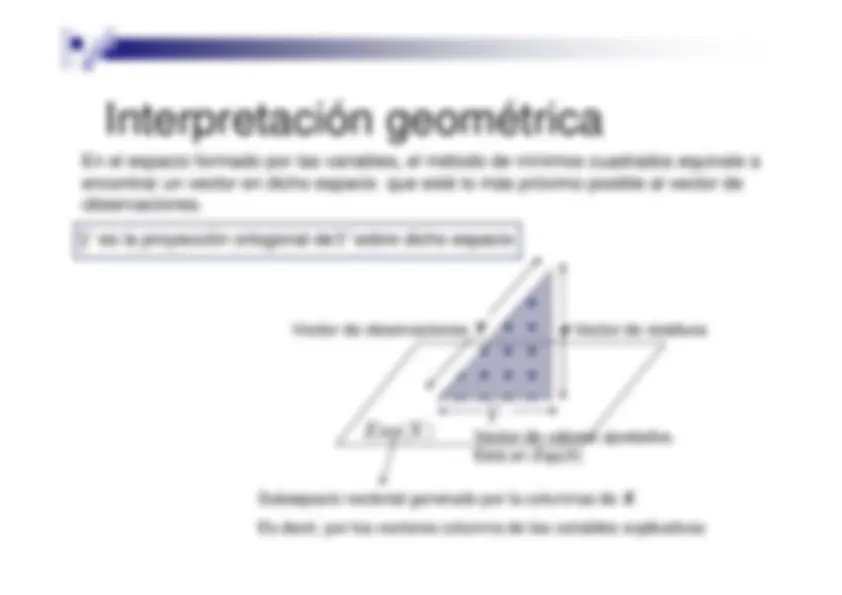
Interpretación geométrica
En el espacio formado por las variables, el método de mínimos cuadrados equivale aencontrar un vector en dicho espacio que esté lo más próximo posible al vector deobservaciones.
Subespacio vectorial generado por la columnas de
X
.
Es decir, por los vectores columna de las variables explicativas
Vector de observaciones
Y
e
Vector de residuos
Esp
Vector de valores ajustados.Está en
Esp(X)
es la proyección ortogonal de
sobre dicho espacio
ˆ β
= (
X
T
X
)
−
1
X
T
Y
Le llamaremos matriz
Sabemos que el vector de observaciones
se distribuye según una normal
multivariante de mediay de matriz de varianzas covarianzas
β
σ
2
n
n
β
σ
2
n
β
es una combinación lineal de las componentes del vector
, así que
también se distribuye según una variable aleatoria normal.
β
A continuación, calcularemos su media y matriz de varianzas y covarianzas
La estimación de
la hacíamos a través de la varianza residual
σ
2
De manera que, estimaremos la varianza de
mediante
β
i
β
i
σ
2
q
ii
ˆs
2 R
=
1
n
−
(
k
+1)
P
n i
=
e
2 i
ˆs
2 R
q
ii
La raíz cuadrada de
nos da el error estándar de
ˆs
2 R
q
ii
β
i
Se puede demostrar que:
(
n
−
k
−
1)ˆ
s
2 R
σ
2
χ
2 n
−
k
−
1
β
i
p
ˆs
2 R
q
ii
s
R
q
ii
El valor de
t
va a contrastar si
, (hipóteis nula, H
0
) frente a la hipótesis
alternativa (
), es decir si el valor de este parámetro en la población es
realmente cero o no.
Contraste
t
Hemos visto que:
β
i
β
i
σ
2
q
ii
. Por tanto, estandarizando, se obtiene que:
ˆ β
i
−
β
i
σ
√
q
ii
Una variable
t
de Student con
k
grados de libertad se define así:
t
k
=
N
(
,
√
(^1) k
χ
2 k
β
i
De ser cierta esta hipótesis, entonces la variable
X
i
no influiría sobra la variable
respuesta
Y.
β
i
t
ˆβ
i
−
β
i
σ
√
q
ii
r
1
n
−
k
−
1
(
n
−
k
−
1)ˆ
s
2 R
σ
2
ˆ β
i
−
β
i
ˆs
R
√
q
ii
t
n
−
k
−
1
Intervalos de confianza
Sabemos que:
Así que, podemos afirmar que:
t
α
/
2
ˆ β
i
−
β
i
SE
(
ˆ β
i
)
t
α
/
2
α
β
i
t
α
/
2
β
i
β
i
β
i
t
α
/
2
β
i
α
Con confianza
,
α
β
i
β
i
t
α
/
2
β
i
Cuando
n>
y
el intervalo se convierte en:
α
β
i
β
i
β
i
t
ˆ β
i
−
β
i
SE
(
ˆ β
i
)
t
n
−
k
−
1
Descomposición de variabilidad
Vamos a comenzar descomponiendo la variabilidad total de Y:
n i
=
y
i
¯y
2
n i
=
y
i
y
2
n i
=
y
i
y
2
n i
=
e
2 i
n i
=
y
i
y
e
i
Por las ecuaciones normales, este término vale cero.
y
i
y
i
e
i
y
i
y
2
y
i
¯y
e
i
2
y
i
y
2
e
2 i
y
i
¯y
e
i