¡Descarga La programación y más Apuntes en PDF de Arquitectura solo en Docsity!
La programación de proyectos
con recursos limitados
MANUEL ORTIGUEIRA BOUZADA ()*
I. PLANTEAMIENTO DEL PROBLEMA
Los métodos de programación reticular por "camino crítico" (PERT, CPM., etc.), que en los últimos años han evolucionado de forma vertigi- nosa, permiten establecer un programa que minimiza la duración de un proyecto considerando únicamente:
— las restricciones secuenciales de las actividades impuestas por la tecnología del proyecto examinado; y — los tiempos estimados para la ejecución de cada una de las tareas.
Implícitamente, se presupone la suficiente disponibilidad de recursos en el momento de ser reclamados por las distintas actividades de un proyecto. Empero, los programas resultantes pueden no corresponder a la realidad, por existir restricciones que invalidan las bases para la determinación del camino crítico, siempre y cuando, en el programa, no sean recogidas tales limitaciones (empleando, por ejemplo, redes simuladas) (1). Por otra parte, la dificultad de las empresas para conseguir adecuar sus disponibilidades de recursos a las fluctuaciones de los distintos proyectos cuya ejecución acometen, convierte la limitación de recursos en el proble- ma más capital de la programación de proyectos. Se presenta, a menudo,
(*) Colaborador de la cátedra de Economía de la Empresa, que dirige el ca- tedrático doctor Suárez y Suárez, de la Facultad de Ciencias Económicas de Má- laga. (1) JAMES M. ANTILL y RONALD W. WOODHEAD: Método de la ruta critica y su aplicación a la construcción, Limusa-Wiley, S. A., México, 1967.
MANUEL ORTIGUEIRA BOUZADA
la imposibilidad de afrontar el comienzo de una actividad crítica debido a que los especialistas, los equipos o los medios financieros previstos como disponibles, no lo están. Esto provoca, en definitiva, el retraso en la fecha de terminación del proyecto. Bernard Roy (2), en su sistemática, considera la limitación de recursos como una restricción "acumulativa" de los problemas de programación. Otras restricciones, llamadas "disyuntivas", aparecen cuando dos tareas se han de ejecutar en intervalos de tiempo distintos, por utilizar un mismo equipo. Señala Roy (3) que las restricciones acumulativas son de difícil formulación matemática. Ello se debe a que corresponden a fenómenos im- precisos, vagos, adaptativos, plásticos. Frente a las restricciones acumula- tivas, las restricciones disyuntivas corresponden a fenómenos rígidos, rigu- rosos, sin matices. Aunque en este trabajo no consideraremos este tipo de restricciones disyuntivas, diremos que dan lugar, cuando aparecen, a pro- blemas combinatorios muy difíciles, cuyo tratamiento puede verse en Bernard Roy (4 y 5) y Alain Durand (6). La búsqueda de una programación óptima en un proyecto, cuando exis- ten recursos limitados, no resulta muy complicada en el caso de redes sim- ples y con reducido número de tareas; pero, a medida que las redes se hacen más complejas, el problema se toma más difícil. Esta dificultad, intrínseca al problema, aumenta por la naturaleza combinatoria del mismo, al tener que coordinar restricciones y secuencias tecnológicas con requeri- mientos y disponibilidades. Por otra parte, una formulación matemática ri- gurosa choca con la relativa flexibilidad de la mayor parte de las restric- ciones que pesan sobre el problema. No se dispone hasta el presente, como
(2) BERNARD ROY: Physonomie et traitement des problémes d'ordonnancement, Gestión, Avril, 1963. (3) BERNARD ROY: Algunos aspectos teóricos de las problemas de programa- ción. Coloquio hispano-francés sobre métodos modernos de gestión, Barcelona,
(4) BERNARD ROY - B. SUSSMANN: Les problémes d'ordonnancement avec con- traintes disjonctives, "Rapport de Recherche", núm. 9, Direction Scientifique SEMA, Décembre, 1964. (5) BERNARD ROY : Prise en compte des contraintes disjonctives dans les me- thodes de chemin critique, "Revue Francaise de Recherche Operationnelle", núme- ro 38, 1966. (6) ALAIN DURAND: Une methode optimale de traitement des contraintes dis- jonctives dans les problémes d'ordonnancement. Application a la construction d'un barrage, "Revue Frangaise de Informatique et de Recherche Operationnelle", nú- mero 3, 1967.
MANUEL ORTIGUEIRA BOUZADA
actividades. En ella, las tareas se disponen siguiendo un determinado cri- terio de precedencia. La asignación a las tareas se hace una a una, de forma que se asegure el examen de todas las precedentes. Dos sistemas de prio- ridad pueden ser empleados: uno dinámico y otro estático, según varíe o no la lista inicialmente establecida. Los algoritmos basados en la asignación en paralelo programan a la vez varias actividades. A pesar de que aparen- temente presentan diferencias con los de asignación en serie, éstas no son importantes al adoptar un procedimiento dinámico en la elaboración de la lista. Se trata, en cierto sentido, de "un enfoque en paralelo a un proce- dimiento en serie". En la programación de proyectos con recursos limitados existen dos pro- blemas implicados, que nosotros trataremos en este trabajo: uno, el proble- ma de nivelación ; otro, el problema de compatibilidad. Antes de pasar a tratar, en los próximos epígrafes, cada uno de los pro- blemas anteriores y su instrumento adecuado, conviene establecer algunas consideraciones básicas.
II. LOS RECURSOS
La estimación de la duración, en cada una de las tareas de un proyecto, se debe hacer teniendo en cuenta la cantidad y la naturaleza del recurso o recursos necesarios para su ejecución. Los recursos pueden ser muy variados. Así, tenemos: materias primas de distintas clases, mano de obra de diversas especialidades, equipos, di- nero, espacio y cualesquiera otros medios. Generalmente, el conjunto de actividades de un proyecto reclama dis- tintas clases de recursos. De éstos, uno o varios desempeñan un carácter principal, lo que obliga a establecer sobre ellos un alto grado de planifi- cación y control, en parangón con aquellos otros que se pueden conseguir "on gran facilidad y reducido coste. Para su ejecución, en un momento dado, cada tarea consume una can- tidad determinada de recursos. Al número de unidades técnicas de este recurso o recursos aplicados en ese momento le llamamos intensidad (I). Denominamos cantidad de trabajo (CT) al producto de la intensidad por la duración (D) de una tarea.
Por lo general, cada tarea es suceptible de ser programada con distin-
LA PROGRAMACIÓN DE PROVECTOS
tos grados de intensidad. Existe una intensidad llamada normal, para la cual el rendimiento (R) de los recursos aplicados es máximo. En este caso, el coste de la actividad es mínimo. Los métodos PERT y CPM emplean esta intensidad. La cantidad de trabajo necesaria para la ejecución de una tarea, al ser considerado el rendimiento, vendrá dada por la expresión:
CT = I X D X R
Los distintos grados de intensidad a los que puede programarse una tarea oscilan entre dos límites, mínimo y máximo, más allá de los cuales no habrá posibilidad de ejecución. Estos límites dependen fundamentalmente de las características y naturaleza de la tarea considerada. El empleo de distintas intensidades en las actividades de un proyecto complica extremadamente, por la gran flexibilidad que se introduce, el proceso de programación. Por lo regular, dentro de las posibilidades existentes, cada tarea se suele programar en base a tres niveles:
— intensidad máxima o acelerada, que emplea el mayor número po- sible de unidades técnicas del recurso- necesario y da como resul- tado la ejecución en tiempo mínimo; — intensidad mínima o lenta, que corresponde a la duración máxima y emplea el menor número posible de unidades técnicas de recurso;
- intensidad normal, que, como ya hemos dicho, corresponde al nú- mero de unidades técnicas aplicables en condiciones normales para alcanzar un rendimiento máximo y, por tanto, coste mínimo. La intensidad a lo largo de la duración de una tarea no siempre se mantiene constante. De hecho, suele variar, y su comportamiento se aso- cia al de una curva cuyas características son: intensidad reducida, uni- forme o creciente en su comienzo (preparación de los trabajos); intensi- dad elevada y uniforme en su tramo central (ejecución de los trabajos); y, por último, intensidad reducida, uniforme o decreciente en su termi- nación (acabado de los trabajos).
La posibilidad de programación intermitente en una actividad hace viable la descomposición en sus diversas partes: preparación, ejecución y acabado. Estas subtareas pueden ser, así, ejecutadas separadamente y a
LA PROGRAMACIÓN DE PROYECTOS
ejecución del proyecto —restricción a considerar— se mantengan a un nivel de carga uniforme. Al igual que sucede con la curva de intensidad en las actividades, también aquí podemos exceptuar un período inicial de empleo progresivo de recursos y un período final de utilización decre- ciente. En los problemas de nivelación, equilibrado o alisado de recursos, la carga debe aproximarse tanto como sea posible, por exceso o por de- fecto, al nivel fijado de disponibilidades.
3.2. RESOLUCIÓN POR EL ALGORITMO DE BURGESS-KILLEBREW.
Los norteamericanos A. R. Burgess y J. B. Killebrew dan un enfoque sistemático al problema de nivelación. En (11) presentan un método en serie cuyas bases condensa J. F. Boss (12) en el siguiente postulado: "La eficacia en la asignación de un recurso determinado, en función de una distribución ideal, varía en sentido inverso a la suma —obtenida en cada unidad de tiempo, del principio al fin del proyecto— de los cua- drados de las diferencias entre las cargas totales que corresponden a las dos asignaciones." Partiendo de un proyecto con tareas programadas a una intensidad constante, el algoritmo de Burgess-Killebrew intenta establecer una curva de carga tan uniforme como sea posible. Para ello, y dado que la carga media no varía por el hecho de que una tarea se haya adelantado- o re- trasado, es preciso minimizar la variancia de la carga. Esto se consigue minimizando la suma total de los cuadrados de las cargas de cada período de tiempo.
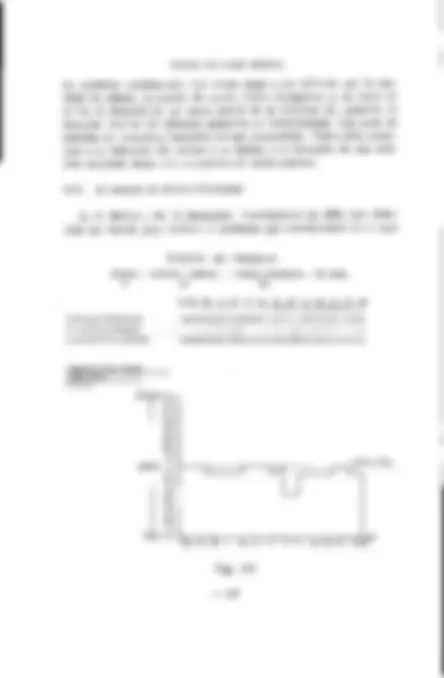
3.2.1. Desarrollo del método.
Se comienza por elaborar el instrumento convencional de representa- ción del proyecto: el grafo. A continuación, se establecen los calenda- rios de comienzo de actividades en sus fechas más tempranas o más tardías, en forma de diagramas de Gantt. Para ello, se parte de un listado
(12) J. F. Boss: Prise en consideration des contraintes pesant sur la disponi- bilité des moyens dans les methodes de chemin critique, "Revue Francaise de Recherche Operationnelle", núm. 38, 1966.
MANUEL ORTIGUEIRA BOUZADA
en el cual se relacionan las tareas del proyecto, siguiendo un criterio de- terminado en el orden de precedencias.
En el caso de que el calendario de partida se haya establecido a base de programar la ejecución de las actividades en sus fechas de comienzo más temprano, el algoritmo^1 sigue los siguientes pasos:
- Comenzar por el final del listado de tareas y tomar la primera actividad que posea margen disponible. Esta tarea se desplaza hacia la derecha, unidad por unidad de tiempo, determinando, cada vez, el efecto obtenido en la suma de cuadrados de carga.
- Determinar, de todas las posiciones posibles de la tarea estudiada, aquella que, sin rebasar el margen disponible, totalice el valor más bajo en la suma de los cuadrados de carga. A valores iguales, se tomará aquél que sitúe la tarea lo más a la derecha posible. Corregir las "fechas lími- te" de terminación de las tareas precedentes a la examinada que hayan sido afectadas por el cambio. Esto será facilitado por el orden elegido al situar las actividades en el gráfico de Gantt.
- Habiendo así encontrado para esta primera tarea una posición óptima, remontando la lista se pasa a la tarea más inmediata que dis- ponga de margen. Esta tarea se somete a un tratamiento semejante al descrito para su antecesora, es decir, se desplaza hacia la derecha hasta el límite permitido por su margen, de forma que su ajuste represente una carga mínima. El proceso descrito se sigue con las demás tareas hasta llegar a la primera de la lista. De esta forma es imposible llegar a una tarea sin haber examinado previamente todas las que le siguen. El criterio de desplazar lo más a la derecha posible las tareas pre- tende dejar el mayor margen posible para su ajuste a las tareas prece- dentes.
- Cuando se acaba el ciclo de cálculos se vuelve a comenzar de nuevo el proceso. Para ello se puede comenzar por el principio o por el final de la lista. Se finalizará cuando, tras un ciclo, ya no sea posible disminuir el valor del último criterio y se haya alcanzado un alisado sa- tisfactorio. Dado que el algoritmo es heurístico, resulta imposible saber si se ha logrado un alisado óptimo, a no ser que se haya alcanzado una nivelación uniforme. Por otra parte, es necesario tener en cuenta que el nivel de disponibilidades no debe ser rebasado. Si lo fuera, será preciso probar otras colocaciones, partiendo de distintas secuencias de activida-
MANUEL 0RTIGUE1RA BOUZADA
Fig- I
0 1 0
6 B 0
6 3 6
/
, |. 3 E 6 0
14 5 14
•»
_KJ 5 14
H 0
23 7 2 3
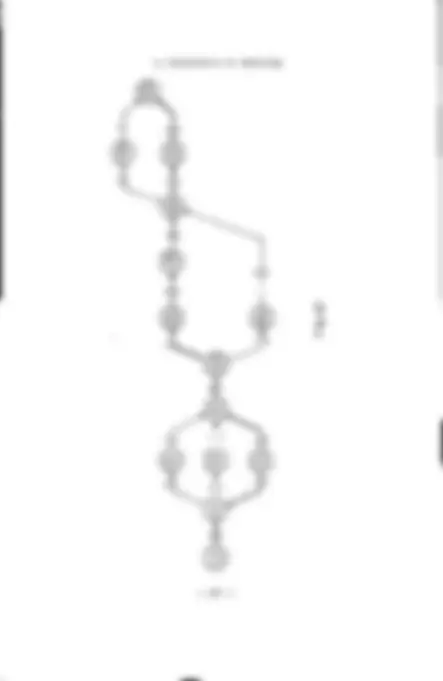
¡ OESCRPCION (^1) «CTIVIDAD i
DISEÑO DE LA INFORMACIÓN EN LA TARJETA.
a = Fecha mas temprana de comienzo. b = Fecha más temprana de terminación. c = Fecha más tardia de comienzo d =T= Fecha mas tardia de terminaciónDuración de la actividad H=ij = HolguraNudos inicial y final de una actividad total
Fig.- 2
LA PROGRAMACIÓN DE PROYECTOS advierte (16), hemos hecho coincidir los valores correspondientes a los nudos 6 y 7. Supondremos, para simplificar, que cada una de las tareas del pro- grama precisa para su ejecución una sola unidad técnica de un mismo recurso (un solo obrero y de una misma especialidad, por ejemplo). Para pasar del programa propuesto (figs. 1 ó 2) al correspondiente diagrama de Gantt se utiliza la tabla I. En esta tabla o listado las tareas se ordenan por sus índices de cabeza (j) crecientes.
TABLA I
DESIGNACIÓN TAREA A B C D E 6
F " H
ÍNDICES i , 1 2 3 3 4 4 5 j 2 3 4 4 3 6 7 7
DURACIÓN
2 6 4 5 8 6 6 9
FECHA mo«TEMR INICIO 0 0 2 6 6 I I 1 1 14
TERMM. 2 6 6 1 1 14 17 17 2 3
FECHA mas TARD. INICIO I I 0 13 12 6 17 17 14
TERMIN. 13 6 17 17 14 2 3 2 3 2 3
RECURSOS CLASE P P P P P P P P
CANTÍO. 1 1 1 1 1 1 1 1
MARGEN TOTAL I I 0 I I 6 0 6 6 0
LIBRE 0 0 5 0 0 6 6 0
A la vista de esta tabla se confecciona un gráfico de barras o de Gantt. Se emplea para ello una escala horizontal representativa del tiempo y una barra de longitud conveniente para cada tarea. Cada barra se nu- mera en sus dos extremos con los índices i-j correspondientes. En la elaboración del diagrama de Gantt comenzamos por la ta- rea A (1-2). A continuación, todas las actividades i-3; aquí, únicamente la actividad B (1-3), paralela a la actividad A. Pasamos a las activida- des i-4: las tareas 2-4 y 3-4, que se sitúan a continuación de 1-2 y 1- respectivamente. Luego pasamos a las tareas i-5, i-6 e i-7. Podemos ob- servar (fig. 3) que cada tarea, cuyo comienzo posee un índice determi-
(16) ANDRÉS SANTIAGO SUÁREZ SUÁREZ: Consideración en torno a las holgu- ras o tiempos sobrantes y a las actividades ficticias en el método PERT, "Revista Técnica del Instituto de Censores Jurados de Cuentas de España", núm. 3, julio- septiembre, 1968.
LA PROGRAMACIÓN DE PROYECTOS
La suma de los cuadrados de carga diaria se eleva a 102. Resulta, por tanto, ventajoso este desplazamiento. Siguiendo el procedimiento, pode- mos comprobar cómo del valor 102 pasamos al valor 100, del valor 100 al 98, de 98 a 96, de 96 a 94 y, por último, del valor 94 al valor 92, para el cual la distribución de carga es la siguiente:
2-2-2-2-2-2-2-2-2-2-2-2-2-2-2-2-2-2-2-2-2-2-
Al primer intento hemos alcanzado el alisado óptimo; pero, de no haber sido así, habríamos de pasar a realizar cálculos con las activida- des 4-6, tal vez 3-4 —si fueran desplazadas 4-7 y 4-6—, 2-4 y, posiblemen- te, 1-2, aunque intuitivamente, en este caso, claramente se ve que con el desplazamiento de 4-7, o bien 4-6, a lo largo de 6 unidades de tiempo, habríamos alcanzado un alisado perfecto. La figura 4 presenta el gráfico de Gantt correspondiente al alisado óptimo. Puede suceder que los planificadores no queden satisfechos del ali- sado conseguido partiendo de un programa con tareas dispuestas para su
ÍNDICE
A { B { 3
2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
D 1, E {^5 6 (e ( < H
1 fx-
2
2
2
2
Z 2 2
•:-3. 4
2
3
2 2 2 2
4
2
4
2 2
•:-K
2 2 2
6
2
4
2 2 2 2 2
7 X*
2 Fig.- 4 comienzo más temprano. No hay que olvidar, como indican sus creadores, que el algoritmo puede generar resultados distintos para un mismo pro- grama. Es suficiente, para ello, partir de distintos planeamientos al co- menzar la operatoria. Veamos cómo, programando inicialmente las tareas en sus fechas de comienzo más tardío (fig. 5), se alcanzan los mismos resultados.
MANUEL ORTIGUEIRA BOUZADA
ÍNDICE 0 I 2 3 4 5 6 7 8 9 10 II 12 13 14 15 16 17 18 I? 20 21 22 23
<
2 A (2 M
C J
D 1^ E {^5 6 ^ F Í
1
1 1
3
1
3
1 1 1
- -
1 1
3
2
5
5
4 4
4 4
6 7 7
F¡g.-
El programa de la figura 5 totaliza una suma de cuadrados de carga igual a 114. Hacemos el primer desplazamiento, comenzando, esta vez, por la parte superior del diagrama. Trasladamos el comienzo de la tarea 1- a la fecha 0. Reducimos así la suma de cuadrados de carga a 112. A con- tinuación, procedemos de igual modo' con las tareas 2-4 y 3-4, cuyo comien- zo desplazamos a las fechas 2 y 6, respectivamente. Estos desplazamientos hacen disminuir el sumatorio de los cuadrados de carga a 104. Por úl- timo, trasladamos la actividad 4-6 a su fecha de comienzo más temprano.
Í N D I C E 0 1 2 3 4 5 6 7 8 9 1 0 1
C
G F Í H 17
CARGA 2 2
& : •
12 13 14 15 16 17 18 19 20 21 22 23
2 | 2 I 2 2 2 2 2 2 2 2 2 2 2 I 2 2 Fig. - 6
MANUEL ORTIGUEIRA BOUZADA
constituyen los instrumentos más idóneos para resolver el problema de determinación y nivelación de cargas. Aparte de la nivelación de recursos, plantearemos nuestro problema suponiendo que el objetivo a alcanzar es la cadencia más rápida, con la restricción de que no se dé comienzo a ninguna actividad antes de que sea concluida la homogénea del proyecto o pieza precedente. Sea la red de la figura 7. En ella se definen las tareas de una supuesta pieza a fabricar en serie. Como se aprecia, existen tres tipos de recursos distintos. Estos recursos son reclamados en cantidades variables por las actividades, de manera conjunta o independientemente. La prioridad es- tablecida para la nivelación de cada tipo de recurso viene dada por el orden: I, II y III. Al trazar el gráfico de Gantt, respetando las condiciones señaladas, está claro que el ciclo más corto posible viene dado por la tarea de ma- yor duración: la actividad H, con un tiempo de 8 unidades. El diagrama de Gantt que nos presenta la figura 8, elaborado a partir de la tabla II, permite representar el de la figura 9. En éste se pone de manifiesto la tipología del problema que estamos tratando, al expresar las relaciones que existen entre ciclos sucesivos.
TABLA I I
DESIGNACIÓN TAREA A B C D E F G H
ÍNDICES ¡ 1 1 2 2 3 3 3 4 i 2 3 3 4 4 5 6 6
DURACIÓN
6 3 2 6 1 2 4 8
FECHA mas TEMR INICIO 0 0 6 6 8 8 8
12
TERMK 6 3 8 12 9 10 12 2 0
FECHA mas TARD. INICIO 0 8 9 6 1 1 18 16 12
TERMIN. 6 1 1 1 1 12 12 20 20 20
RECURSOS I - 5 - - 5 - 5 8 I I 3 1 3 2 1 2 1
n i 4 3 4 - 3 - 3
MARGEN TOTAL 0 8 3 0 3 10 8 0
UBRE 0 5 0 0 3 10 8 0
La ventaja del gráfico de la figura 9 es que permite determinar rápi- damente las variaciones de la carga de recursos a lo largo del tiempo total de fabricación.
174 —
LA PROGRAMACIÓN DE PROYECTOS
ÍNDICE N2 O
B C [ D E 14 F S
RECURSOS^n lili
SSL
8 9 10
LS.
Sí
12 13 14 IS 16 17 18 19 20
Fig.-
Con el fin de dar claridad a nuestra exposición, supondremos que el gráfico de la figura 8 está sobre un tambor cuyo perímetro tiene una longitud igual a un ciclo de duración (en este caso 8 unidades de tiempo impuestas por la actividad 4-6), tal como muestra la figura 10. El gráfico de la figura 10 permite determinar con rapidez la carga por cada intervalo de tiempo; sin embargo, al compararlo con la figura 9, se pone de manifiesto el peor desarrollo de las actividades. Esto obliga a tener que señalar el margen "libre" con un corchete (]) que se coloca en su límite y a indicar marginalmente a cuántas vueltas de tambor se sitúa.
NDICE N2 C A (a I 8 (a C 3 D «
E L F ( G ri H [. I I I I I I
8 1 -
w (^3 ) 1 "T
23 10 13
2
1 II-
2 n -m 8 n i n
(^189) 10
3
im^3
sm
"HT I I
18 7 10
A
4
6 6
13 8 9
__ 5 6
4
8 3 4
7 -A
8 3 4
j n 2
8 9 4
(
} 4 ni
8 1
8 9 4
I S
SI^1
(^1) 8 1 1 3 3 ü 9 1
23 10 13
10 1
III-
-1IlJ 8
u
III-
IS 9 10
3J»
3 n
3in
18 7 10
12 13 14 1!
4
6 6
13 8 9
4
8 3 4
2
8 3 4
2 3 J | - z
8 8 4
> It
3
8 8 4
> 1
81
3 81 < 3 2 3 81 8 1
23 10 13
It
IJI-
Wm -III 8 n 'II-
18 9 10
-IS
3 i p
sm
31U
19 7 10
2C
4
6 $
13 8 9
Fig.-
LA PROGRAMACIÓN DE PROYECTOS siguiente de la tarea 3-4 en 3 unidades de tiempo reduce a 1.352 la suma de cuadrados. El perfil resultante es ya óptimo: 13-13-13-13-13-13-13- La figura 11 presenta el diagrama de Gantt después de este primer proceso de nivelación. Como podemos comprobar, se ha logrado alisar simultáneamente la carga correspondiente al recurso III. Se nivela a continuación el recurso II. El desplazamiento de 4 unida- des de tiempo en la tarea 3-5 permite reducir el sumatorio de carga de 304 unidades a 288. De esta manera se ha logrado un alisado perfecto, (véanse las figs. 11 y 12).
I 2 3 5 6 7 8 9 10 II 12 13 14 15 16 17 18 19 20 A (. B (-i C 1. D a
H 6 I I III
5 1 -
13 7
1 n-
211
13 7
111- 3 snr
I I
13 7
411!
4
w
13 7
1It- 3 2 3
*t
13 7
2
9DI 5 11
13 7
2 2^ sn-
Jlfl
13 7
3 4iit
e
- I 13 7
1 1 51
13 7
n i -
211
13 7
?H- 3 5 ni
13 7
4in
4 5 4 í I
13 7
III- 3, 2 3 «V
13 7
2
3III 5 II iü
13 7
2 311- 2
3 til
13 7
3 4in
c
13 7
| SI-
S Í
14 7
m- m-
ifl 5 1 -
13 7
3 IB
i n
I 7
4 3 4 m
13 7
Fig.-I
El problema que acabamos de presentar responde a un tipo particu- lar de programas repetitivos. La nivelación podría complicarse conside- rablemente al adoptar el problema otras formas más complejas: los pro- gramas multiciclos en serie y en paralelo que tratan C. Fisher y G. L. Nemhauser (17).
3.3. OTROS MÉTODOS DE NIVELACIÓN. 3.3.1. Algoritmo de Hughes Corporation. Un algoritmo de naturaleza heurística ha sido puesto a punto por el Ground Systems Gruop, de la compañía norteamericana Hughes Cor- poration. (17) CAROLYN FISHER and GEORGE L. NEMHAUSER: Multicicle Proyect Planning, "The Journal of Industrial Engineering", vol. XVIII, núm. 4, April, 1967.
— 177 -
12
MANUEL ORTIGUEIRA BOUZADA
El algoritmo de nivelación en paralelo HGSG, al igual que la rutina de Burgess-Killebrew, tiene como objetivo minimizar las fluctuaciones de nivel en los recursos, respetando- las restricciones potenciales del pro- blema. Generalmente, el tipo de recurso que se suele tratar es la mano de obra, y, dentro de ésta, aquellas especialidades más críticas. En el método HGSG, el control de la minimización se efectúa sobre la magnitud absoluta de fluctuación. Sin embargo, cabe la posibilidad de nivelar el programa conforme a ciertos criterios (por ejemplo, los míni- mos cuadrados de las fluctuaciones).
3.3.1.1. Parcialización del problema.
El método consiste en dividir el nivel de carga de recursos en inter- valos; luego, alisar secuencialmente cada intervalo, revisando, si es pre- ciso, las fechas de comienzo más temprano de las actividades siguientes. El problema, tratado con ordenador electrónico, genera como salida un histograma. La división del perfil de recursos se realiza determinando aquellos intervalos críticos cuya carga mínima posible rebase la carga media, y aquéllos en los que la carga máxima posible es inferior a esta carga media. En los intervalos en donde la carga mínima sea superior a la carga media no debe programarse actividad alguna con margen suficiente para poder ser desplazada a otro lugar. En los intervalos con carga máxima inferior a la carga media se in- tentará programar cuantas tareas puedan estar presentes, procurando ele- gir, entre las tareas de posible programación, aquellas que supongan una menor carga. El proceso de parcialización en intervalos o subproblemas conduce a la reducción del margen de muchas tareas, lo que hace aparecer nuevas zonas críticas
3.3.1.2. Los límites de los intervalos.
La carga de cada uno de los períodos de tiempo a lo largo de la du- ración del proyecto, oscila entre dos límites: uno, el límite superior, representa el valor de la carga máxima posible que la programación de tareas puede dar en cada unidad de tiempo; otro, el límite inferior, re-
— 178 -