¡Descarga Sistemas Automáticos de Control: Conceptos, Tipos y Representación y más Ejercicios en PDF de Ingeniería Electromagnética solo en Docsity!
SISTEMAS AUTOMÁTICOS DE CONTROL
(T: 13, 14 y 15)
Un sistema automático de control es un conjunto de componentes físicos conectados o relacionados entre sí, de manera que regulen o dirijan su actuación por sí mismos, es decir sin intervención de agentes exteriores (incluido el factor humano), corrigiendo además los posibles errores que se presenten en su funcionamiento.
Actualmente, cualquier mecanismo, sistema o planta industrial presenta una parte actuadora, que corresponde al sistema físico que realiza la acción, y otra parte de mando o control, que genera las órdenes necesarias para que esa acción se lleve o no a cabo.
Para explicar el fundamento de un sistema de control se puede utilizar como ejemplo un tirador de arco. El tirador mira a la diana, apunta y dispara. Si el punto de impacto resulta bajo, en el próximo intento levantará más el arco; si la flecha va alta, en la siguiente tirada bajará algo más el arco; y así sucesivamente, hasta que consiga la diana. El tirador sería el elemento de mando (da las órdenes de subir o bajar el brazo) y su brazo el elemento actuador.
En el ejemplo expuesto se observa que el objetivo se asegura mediante el método de prueba y error. Lógicamente los sistemas de control, al ser realizados por ordenadores o por otros medios analógicos, son más rápidos que en el caso del tirador.
Se puede mejorar el modelo sustituyendo el tirador por un soldado con un arma láser, que está continuamente disparando. El soldado es el elemento de mando en el sistema, y la mano con la que se sostiene el arma el elemento actuador.
En Automática se sustituye la presencia del ser humano por un mecanismo, circuito eléctrico, circuito electrónico o, más modernamente por un ordenador. El sistema de control será, en este caso automático.
Un ejemplo sencillo de sistema automático lo constituye el control de temperatura de una habitación por medio de un termostato, en el que se programa una temperatura de referencia que se considera idónea. Si en un instante determinado la temperatura del recinto es inferior a la deseada, se producirá calor, lo que incrementará la temperatura hasta el valor programado, momento en que la calefacción se desconecta de manera automática.
Necesidad y aplicaciones de los sistemas automáticos de control
En la actualidad los sistemas automáticos juegan un gran papel en muchos campos, mejorando nuestra calidad de vida:
- En los procesos industriales :
- Aumentando las cantidades y mejorando la calidad del producto, gracias a la producción en serie y a las cadenas de montaje.
- Reduciendo los costes de producción.
- Fabricando artículos que no se pueden obtener por otros medios.
- En los hogares : Mejorando la calidad de vida. Podríamos citar desde una lavadora hasta un control inteligente de edificios (domótica).
- Para los avances científicos : Un claro ejemplo lo constituyen las misiones espaciales.
- Para los avances tecnológicos : por ejemplo en automoción es de todos conocidos los limpiaparabrisas inteligentes, etc.
Como se puede observar las aplicaciones son innumerables. De esta manera surge toda una teoría, La Regulación Automática, dedicada al estudio de los sistemas automáticos de control.
CONCEPTOS
Variables del sistema: son todas las magnitudes, sometidas a vigilancia y control, que definen el comportamiento de un sistema (velocidad, temperatura, posición, etc.).
Entrada : es la excitación que se aplica a un sistema de control desde una fuente de energía externa, con el fin de provocar una respuesta.
Salida: es la respuesta que proporciona el sistema de control.
Perturbación: son las señales no deseadas que influyen de forma adversa en el funcionamiento del sistema. Por ejemplo abrir una ventana representa una perturbación en el sistema de control de temperatura mediante termostato.
Planta: sistema sobre el que pretendemos actuar.
Sistema: es un conjunto de elementos interrelacionados capaces de realizar una operación dada o de satisfacer una función deseada.
Entrada de mando: señal externa al sistema que condiciona su funcionamiento.
Señal de referencia: es una señal de entrada conocida que nos sirve para calibrar al sistema.
Señal activa: también denominada señal de error. Representa la diferencia entre la señal de entrada y la realimentada.
Unidad de control: gobierna la salida en función de una señal de activación.
Unidad de realimentación: está formada por uno o varios elementos que captan la variable de salida, la acondicionan y trasladan a la unidad de comparación.
Actuador: es un elemento que recibe una orden desde el regulador o controlador y la adapta a un nivel adecuado según la variable de salida necesaria para accionar el elemento final de control, planta o proceso.
Transductor: transforma una magnitud física en otra que es capaz de interpretar el sistema.
Amplificador: nos proporciona un nivel de señal procedente de la realimentación, entrada, comparador, etc, adecuada al elemento sobre el que actúa.
De acuerdo con su naturaleza los sistemas de control pueden ser:
Sistemas naturales : por ejemplo la transpiración o control de la temperatura del cuerpo humano. La entrada del sistema es la temperatura habitual de la piel, y la salida, su temperatura actual. Si esta última es elevada, la sudoración aumenta para que, por evaporación, se produzca un enfriamiento de la piel. A medida que la temperatura va decreciendo, se va disminuyendo la secreción de sudor.
Sistemas realizados por el hombre (artificiales) : por ejemplo el control de temperatura mediante termostato. La entrada del sistema es la temperatura de referencia que se
y división como se muestra en la siguiente figura:
Ejemplos (P. 254)
Considera la siguiente ecuación: x 3 = a 1 • x.| - a 2 - x 2 + a 3 en la que x 1 , x 2 y x 3 son variables y a 1 , a 2 y a 3 , coeficientes matemáticos.
Represéntala en forma de diagrama de bloques, identificando todos ellos, con sus entradas y sus salidas.
Solución :
- Variables: xp x 2 y x 3
- Coeficientes: ap a2y a 3
La salida es el término x3 de la ecuación. Las otras dos variables se suman o restan afectadas de coeficientes. Existe además un término independiente en la ecuación.
Por lo tanto, el diagrama en bloques para la ecuación pedida es el que se representa a continuación:
TIPOS DE SISTEMAS DE CONTROL
Los sistemas de regulación se pueden clasificar en:
Sistemas de bucle o lazo abierto : son aquellos en los que la acción de control es independiente de la salida. Sistemas de bucle o lazo cerrado : son aquellos en los que la acción de control depende en cierto modo, de la salida.
Sistemas de control en LAZO ABIERTO
Un sistema de control en lazo o bucle abierto es aquél en el que la señal de salida no influye sobre la señal de entrada. La exactitud de estos sistemas depende de su calibración, de manera que al calibrar se establece una relación entre la entrada y la salida con el fin de obtener del sistema la exactitud deseada.
El diagrama de bloque de un sistema en lazo abierto es:
El sistema se controla bien directamente, o bien mediante un transductor y un actuador. El esquema típico del sistema será, en este caso:
El transductor modifica o adapta la naturaleza de la señal de entrada al sistema de control.
En el caso del sistema de control de la temperatura de una habitación , para que sea un sistema abierto es necesario que no exista termostato, de manera que siga funcionando permanentemente. La entrada del sistema sería la temperatura ideal de la habitación; la planta o proceso sería la habitación y la salida sería la temperatura real de la habitación. El transductor podría ser un dial en el que definamos el tiempo de funcionamiento y el actuador el propio foco de calefacción (caldera o radiador).
El actuador o accionador modifica la entrada del sistema entregada por el transductor (normalmente amplifica la señal).
Una lavadora automática sería un claro ejemplo de sistema de control en lazo abierto. La blancura de la ropa (señal de salida) no influye en la entrada. La variable tiempo presenta una importancia fundamental: si está bien calibrada, cada proceso durará el tiempo necesario para obtener la mejor blancura.
Otro ejemplo de sistema en lazo abierto sería el alumbrado público controlado por interruptor horario. El encendido o apagado no depende de la luz presente, sino de los tiempos fijados en el interruptor horario.
El controlador está formado por todos los elementos de control y a la planta también se le llama proceso.
En este esquema se observa cómo la salida es realimentada hacia la entrada. Ambas se comparan, y la diferencia que existe entre la entrada, que es la señal de referencia o consigna (señal de mando), y el valor de la salida (señal realimentada) se conoce como error o señal de error. La señal que entrega el controlador se llama señal de control o manipulada y la entregada por la salida, señal controlada.
El error, o diferencia entre los valores de la entrada y de la salida, actúa sobre los elementos de control en el sentido de reducirse a cero y llevar la salida a su valor correcto. Se intenta que el sistema siga siempre a la señal de consigna.
El diagrama de bloques anterior se puede sustituir por el siguiente:
La salida del sistema de regulación se realimenta mediante un captador. En el comparador o detector de error, la señal de referencia (salida del transductor) se compara con la señal de salida medida por el captador, con lo que se genera la siguiente señal de error:
e(t) = r(t) – b(t)
donde e(t) es la señal de error, r(t) la señal de referencia y b(t) la variable realimentada.
Pueden suceder dos casos:
- Que la señal de error sea nula. En este caso la salida tendrá exactamente el valor previsto.
- Que la señal de error no sea nula. Esta señal de error actúa sobre el elemento regulador que a su salida proporciona una señal que, a través del elemento accionador, influye en la planta o proceso para que la salida alcance el valor previsto y de esta manera el valor se anule.
En el ejemplo de control de temperatura de una habitación, el sistema, planta o proceso es la habitación que se quiere calentar, el transductor puede ser un dial con el que se define el grado de calentamiento, el actuador o accionador una caldera o un radiador y el captador puede ser un termómetro. Este último actúa como sensor midiendo la temperatura del recinto, para que pueda ser comparada con la de referencia.
El regulador o controlador es el elemento que determina el comportamiento del bucle , por lo que debe ser un componente diseñado con gran precisión. Es el cerebro del bucle de control. Mientras que la variable controlada se mantenga en el valor previsto, el regulador no actuará sobre el elemento accionador. Pero si el valor de la variable se aleja
del prefijado, el regulador modifica su señal, ordenando al accionador que actúe sobre la planta o proceso, en el sentido de corregir dicho alejamiento. El termostato del ejemplo anterior realizaría esta función.
Los sistemas en lazo cerrado son mucho menos sensibles a las perturbaciones que los de lazo abierto , ya que cualquier modificación de las condiciones del sistema afectará a la salida, pero este cambio será registrado por medio de la realimentación como un error que es en definitiva la variable que actúa sobre el sistema de control. De este modo, las perturbaciones se compensan, y la salida se independiza de las mismas.
Ejemplos
Representa en forma de diagrama de bloques el sistema de control para caminar en una determinada dirección.
¿Es de lazo abierto o cerrado? ¿Cómo sería el sistema de control si fuese del otro tipo?
Solución :
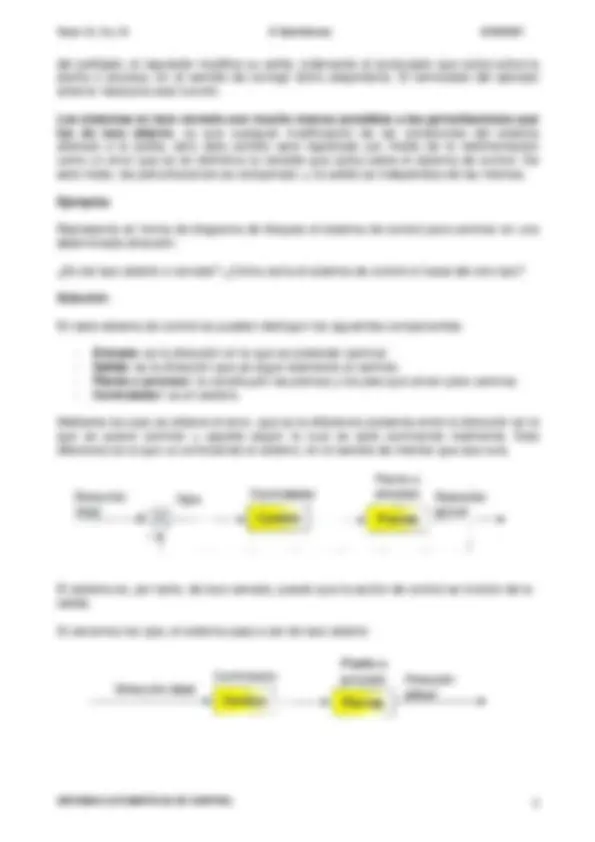
En este sistema de control se pueden distinguir los siguientes componentes:
- Entrada : es la dirección en la que se pretende caminar.
- Salida : es la dirección que se sigue realmente al caminar.
- Planta o proceso : la constituyen las piernas y los pies que sirven para caminar.
- Controlador : es el cerebro.
Mediante los ojos se obtiene el error, que es la diferencia existente entre la dirección en la que se quiere caminar y aquella según la cual se está caminando realmente. Esta diferencia es la que va controlando el cerebro, en el sentido de intentar que sea nula.
El sistema es, por tanto, de lazo cerrado, puesto que la acción de control es función de la salida.
Si cerramos los ojos, el sistema pasa a ser de lazo abierto:
CONCEPTO DE FUNCIÓN DE TRANSFERENCIA
(Tema 14, P. 259)
Para determinar la respuesta de un elemento en función del tiempo, se aplican señales conocidas a la entrada del sistema o elemento y se evalúan las señales que aparecen en la salida. La respuesta obtenida así se llama respuesta transitoria. Normalmente la señal de entrada es una señal de entrada en forma de escalón.
También se puede estudiar la respuesta matemáticamente mediante la función de transferencia o respuesta en frecuencia. Por medio de la función de transferencia se puede conocer:
- La respuesta del sistema frente a una entrada determinada.
- La estabilidad del sistema (si la respuesta del sistema se va a mantener dentro de unos límites determinados).
- Qué valores se pueden aplicar al sistema para que permanezca estable.
Se define función de transferencia G(s) de un sistema como el cociente entre las transformadas de Laplace de las señales de salida y entrada.
Las características de la función de transferencia dependen únicamente de las propiedades físicas de los componentes del sistema, no de la señal de entrada aplicada.
La función de transferencia viene dada como el cociente de dos polinomios en la variable compleja s de Laplace, uno, N(s) (numerador) y otro D(s) (denominador ).
La función de transferencia es muy útil para, una vez calculada la transformada de Laplace de la entrada, conocer de forma inmediata la transformada de Laplace de la salida. Calculando la trasformada inversa se obtiene la respuesta en el tiempo del sistema ante esa entrada determinada.
POLOS Y CEROS
El denominador de la función de transferencia, D(s) , se conoce como función característica , pues determina, a través de los valores de sus coeficientes, las características físicas de los elementos que componen el sistema.
La función característica igualada a cero se conoce como ecuación característica del sistema :
Las raíces de la ecuación característica se denominan polos del sistema. Las raíces del numerador N(s) reciben el nombre de ceros del sistema.
Se puede demostrar que para que un sistema sea físicamente realizable , el número de polos debe ser mayor, o al menos igual, que el número de ceros. Si fuese al contrario, esto implicaría que el sistema responde antes de que se produzca el estímulo, lo cual es físicamente imposible.
ESTABILIDAD DE UN SISTEMA (P. 274)
Un sistema estable es aquél que permanece en reposo a no ser que se excite por una fuente externa, en cuyo caso alcanzará de nuevo el reposo una vez que desaparezcan todas las excitaciones.
Para que un sistema sea estable, las raíces de la ecuación característica o polos deben estar situadas en el lado izquierdo del semiplano complejo de Laplace:
Los polos situados en el origen o sobre el eje imaginario dan lugar a respuestas continuas o constantes que se consideran inestables.
Los polos en la parte derecha del plano complejo dan lugar a respuestas que crecen con el tiempo y por lo tanto son inestables.
Se dice que un sistema de control es estable cuando aplicando a su entrada una señal Delta de Dirac δ(t), a la salida aparece una señal decreciente en el tiempo que se hace cero cuando el tiempo tiende a infinito.
1.- Amortiguamiento exponencial. 2.- Sinusoide amortiguada exponencialmente. 3.- Constante. 4.-Sinusoide de amplitud constante. 5.- Incremento exponencial. 6.- Sinusoide incrementada exponencialmente.
DIAGRAMAS DE BLOQUES: OPERACIONES (P. 269)
Un bloque es una representación gráfica de la relación causa-efecto existente entre la entrada y la salida de un sistema físico. El bloque se representa mediante un rectángulo que contiene el nombre o la descripción del elemento, o la operación matemática que se ejecuta sobre la entrada para obtener la salida.
Comparadores
Combinación entre líneas de actuación
La interacción entre bloques viene representada por líneas de actuación que llevan en su extremo una flecha que indica el sentido del flujo.
Combinaciones básicas de bloques:
Conexión serie
Conexión paralelo
Conexión en anillo con realimentación directa
Ejemplos
Obtener la función de transferencia del siguiente diagrama de bloques:
Solución :
Lo primero que se debe hacer es simplificar el bucle más interno.
Llamando C 1 (s) a la salida intermedia se obtiene, en el primer punto de suma:
con lo cual el sistema queda reducido a:
Aplicando, ahora, la función de transferencia global para los dos bloques en serie:
estos quedan reducidos a uno solo, cuya función de transferencia será:
Y, finalmente, operando el punto de suma:
ACTIVIDADES (P. 273)
- La función de transferencia de un conjunto de bloques agrupados en paralelo será:
- La suma de las funciones de transferencia aisladas.
- El producto de las funciones de transferencia aisladas.
- El cociente de las funciones de transferencia aisladas.
Indica razonadamente la respuesta correcta.
T. 15, Pág. 284
COMPONENTES DE UN SISTEMA DE CONTROL
- Regulador
- Transductor o captador
- Comparador o detector de errores
- Accionador o actuador
EL REGULADOR O CONTROLADOR
Antiguamente el control de los procesos industriales se llevaba a cabo de manera manual: el propio operario realizaba los cambios adecuados en el sistema para obtener los resultados finales deseados.. Hoy en día, muchas aplicaciones automáticas utilizan el computador como elemento de control.
El controlador o regulador constituye el elemento fundamental en un sistema de control, pues determina el comportamiento del bucle, ya que condiciona la acción del elemento actuador en función del error obtenido. La forma en que el regulador genera la señal de control se denomina acción de control. Algunas de estas acciones se conocen como acciones básicas de control, mientras que otras se pueden presentar como combinaciones de las acciones básicas.
Acciones Básicas Combinación de acciones básicas
Proporcional (P) Proporcional - Integrador (PI)
Derivador (D) Proporcional - Derivador (PD)
Integrador (I) Proporcional – Integrador - Derivador (PID)
Al controlador integrador también se le llama integral. Al controlador derivador también se le llama derivativo o diferencial.
Simbología de los distintos tipos de controladores
Controladores de acciones Básicas
Combinación de controladores básicos
Controlador de acción Proporcional (P)
En este regulador la señal de accionamiento es proporcional a la señal de error del sistema. Si la señal de error es grande, el valor de la variable regulada es grande y si la señal de error del sistema es pequeña, el valor de la variable regulada es pequeña.
Es el más simple de todos los tipos de control y consiste simplemente en amplificar la señal de error antes de aplicarla a la planta o proceso. La función de transferencia de este tipo de control se reduce a una variable real, denominada Kp que determinará el nivel de amplificación del elemento de control.
Llamando y(t) a la señal de salida (salida del regulador) y e(t) a la señal de error (entrada al regulador), en un control proporcional tendremos:
y(t)= Kp e(t), y pasando al dominio de Laplace, tendremos Y(S)= Kp E(S) La función de transferencia del bloque controlador (no la total del sistema), será:
donde Y(S) es la salida del regulador o controlador, E(S) la señal de error y Kp la ganancia del bloque de control.
Teóricamente, en este tipo de controlador, si la señal de error es cero, la salida del controlador también será cero. La repuesta, en teoría es instantánea, con lo cual el tiempo no interviene en el control. Sin embargo, en la práctica, esto no es así, de forma que, si la variación de la señal de entrada es muy rápida, el controlador no puede seguir dicha variación y seguirá una trayectoria exponencial hasta alcanzar la salida deseada